

CAN总线在在物联网和自动化领域广受欢迎
描述
控制器局域网(CAN)总线起源于Robert Bosch GmbH,协议规范于1986年在汽车工程师协会(SAE)会议上正式发布。由英特尔和飞利浦生产的第一批CAN控制器芯片于1987年上市。1991年,梅赛德斯 - 奔驰发布了第一款基于CAN的多路复用布线系统的量产车。它是标准的汽车网络,允许汽车大大减小线束的尺寸和重量。
CAN连接的替代品已被提出,但CAN还活着并且还在增长。事实上,它的用途正在远远超出汽车领域,进入工厂自动化和物联网(IoT)等各种领域。CAN收发器是可以增强设计的众多模拟构建模块之一。你甚至可以称他们为模拟英雄。
CAN总线类型
CAN 2.0A设备协议使用11位标识符,使用29位标识符的设备协议通常称为CAN 2.0B。罗伯特·波什(Robert Bosh)仍然是领先的规格。根据维基百科,国际标准化组织于11898年发布了CAN标准ISO 1993,后来将其重组为两部分。ISO 11898-1涵盖数据链路层,而ISO 11898-2涵盖高速CAN的物理层。ISO 11898-3 稍后发布,涵盖了低速、容错 CAN 的物理层。
SAE J1939标准是卡车和公共汽车广泛使用的CAN协议标准。CAN总线是车载诊断(OBD)-II车辆诊断标准中使用的五种协议之一,该标准自1996年以来一直是在美国销售的所有汽车和轻型卡车的强制性要求,自2001年以来在欧洲销售。
CAN的替代品
CAN的替代方案包括本地互连网络(LIN)总线和Flexray。LIN总线甚至比CAN便宜。LIN不是CAN总线的完全替代品,但在低成本至关重要且速度/带宽不重要的情况下,LIN是一个很好的选择。在汽车应用中,它通常用于对车辆性能或安全性不重要的子系统。Flexray自2000年以来一直在开发中,用于2006年生产的宝马,现在用于大多数德国汽车和SUV。它支持更快的 10Mbps 数据速率和确定性的时间响应,并且设计为冗余。但是,它比CAN昂贵且复杂得多,并且只有24米的范围。还有用于信息娱乐系统的MOST网络。非常快速的以太网连接正在被提议用于汽车中的信息娱乐和显示应用,甚至更多。
将CAN扩展到工业世界
豪华车有多达150个汽车ECU来控制和调节各种功能,现在每辆新车至少有70个ECU。这些ECU必须相互通信,同时控制动力传动系,车身和底盘的几乎所有方面。CAN将每个功能连接到各种ECU(从门锁到制动器、油门踏板和尾灯)。它的受欢迎程度源于非常高的可靠性和简单性——低成本和低功耗。
CAN总线使用简单的25Kbps至1Mbps双绞线连接。现在可以使用芯片来实现2Mbps数据。总线将以1000Kbps的速度达到50m,在40Mbps时达到1m。 CAN的车辆普及源于开发人员发现的优雅方式,以保证在具有安全意识的汽车环境中进行可预测的无差错通信。这些特性也可以在工厂车间得到很好的利用。
CAN在一对电线上以差分方式传输。这种差分特性意味着CAN能够抑制共模噪声。该结构还减少了排放,因为差分通信的电场往往会相互抵消。
使用需要大电流来启动、停止和运行的电机的工业系统就是一个很好的例子,说明CAN的亮点。电机的电磁辐射会导致RS-485或类似通信中的大量错误,而CAN能够通过。除了物理可靠性之外,CAN还包括其他功能以确保鲁棒性,包括循环冗余校验(CRC)和支持错误检测的确认。
作为总线拓扑运行需要设备了解何时可以传输。CAN使用载波检测多址和碰撞检测(CSMA/CD),也用于以太网。当设备想要传输其消息时,它必须感知总线是否空闲且未被使用。碰撞检测允许它检测总线上的另一个设备何时尝试同时传输。CAN使用优先级机制进行总线管理。
随着CAN总线变得非常流行,竞争供应商进行了不同的实现。每个实现都有不同的网络层,即使物理层是通用的。CANopen旨在实现兼容性,以便设计人员可以选择支持CAN的设备,并知道它们会相互作用。它在用于自动化应用的嵌入式系统中最受欢迎。在OSI模型方面,CANopen实现了上述层,包括网络层。
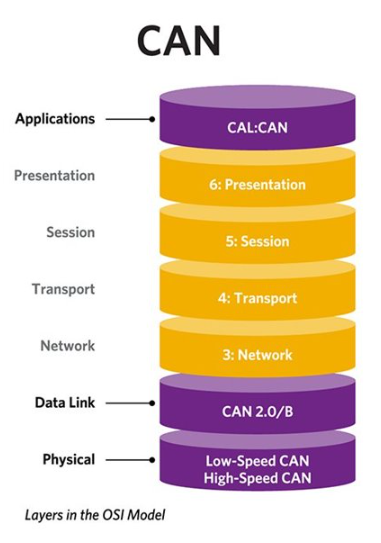
图1.CAN总线的OSI层方案。
将CAN与RS-485进行比较
与RS-485等通信协议相比,CAN不仅为通信提供了物理介质,还提供了处理数据包(消息)所需的所有其他机制,避免数据冲突,检测传输数据中的故障,自动重复受干扰的消息,并确保网络中所有节点的数据一致性。此外,CAN指定数据帧的结构,包括消息标识符、数据和控制字节。RS-485连接仅寻址第1层(物理层),CAN还在OSI模型中添加第2层(数据链路层)。因此,CAN是一种实时兼容的解决方案。根据消息的ID优先级,可以预测每个CAN消息的最大延迟时间,而与总线负载或其他节点的性能无关。使用RS-485必须保证使用应用软件避免碰撞。
CAN具有先进的错误管理功能。如果节点未正确接收消息(CRC 或格式错误),则收件人将通过错误帧销毁该消息,并标记为对所有节点无效。此操作在CAN控制器中启动自动重复。
CAN实施
这些措施共同采取(简短消息、差分传输、错误检测和故障排除、缺陷节点的撤出)使CAN成为一个非常强大、安全、可靠的网络。这就是为什么CAN被用于车辆、船舶、电梯、医疗设备、飞机和工业工厂的许多关键或安全相关应用的原因。
由于CAN协议在硬件中的完全实现,微控制器系统的负载减少了(每条消息只有一个中断)。许多供应商和几乎所有可用的MCU都提供了各种第7层协议,如CANopen、DeviceNet和J1939,从而降低了风险并缩短了上市时间。
坚固耐用的低电流收发器 IC
汽车应用显然需要符合汽车级标准的IC。对于该领域以外的应用,例如前面提到的工业自动化和物联网示例,这里有几个很好的CAN收发器IC可以满足这些应用需求。MAX3051为3.3V、1Mbps、低电源电流CAN收发器IC,主要用于不需要汽车行业规定的严格故障保护的应用。它具有四种操作模式:高速、斜率控制、待机和停机。在斜率控制模式下,发射器的压摆率可以调节到高达500Kbps的数据速率。这减少了由端接不当的电缆引起的EMI和反射,并可能允许使用非屏蔽双绞线。
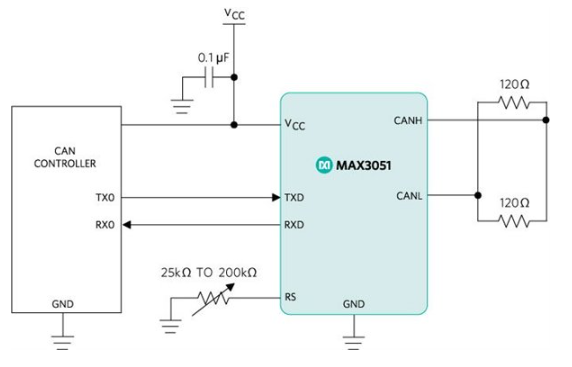
图2.基本的MAX3051收发器电路。
MAX3051输入共模范围为-7V至+12V,超过ISO 11898规范。该器件采用 8 引脚 SO 和 SOT23 封装,工作温度范围为 -40°C 至 +85°C。该芯片提供 ±12kV HBM ESD 保护、热关断和电流限制。
另一个值得注意的CAN收发器IC是MAX13054A。这款 2Mbps CAN 收发器具有高保护级别和 8 引脚 SO 封装。它具有 ±65V 过压故障保护,并集成了高 ±25kV ESD HBM 保护,以及 ±25V 的输入共模范围、短路保护和热关断。一个非常坚固的设备。
该芯片提供非常宽的1.62至5.5V逻辑电源范围,以缓解接口困难。在待机模式下,发射器关闭,接收器切换到低电流/低速状态。监视总线以检测唤醒事件。待机模式仅需要 11μA 的电源电流。收发器包括一个显性超时,以防止由控制器错误或TXD输入故障引起的总线锁定。大型网络上的最大速度可能受到节点数量、布线类型或短截线长度的限制。芯片的温度范围为-40°至125°C,采用8引脚SOIC封装(MAX13054AEASA+)。
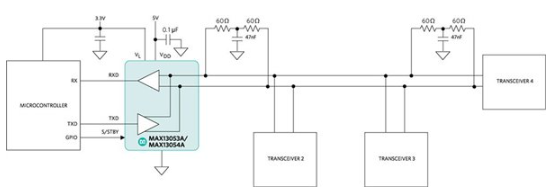
图3.使用MAX13054A收发器的多点CAN总线。
MAX13054(无A后缀)有点不同。此版本完全兼容 ISO11898 标准,根据 IEC 8-61000-4 具有 ±2kV ESD 和 ±80V 故障保护。其他规格,包括封装,与MAX13054A相似。它可用于汽车或扩展温度范围。
强大的CAN接口
仍然受到设计工程师的欢迎,这是有充分理由的。人气还在增长。在可预见的未来,CAN总线将成为一股重要的力量,也是满足各种应用领域许多通信需求的绝佳解决方案。
审核编辑:郭婷
-
广成科技CAN转光纤中继器的拓扑方式2025-01-13 1964
-
CAN总线在工业自动化中的作用2024-12-23 2587
-
CAN总线在工业自动化中的应用2024-11-12 3479
-
基于CAN总线的自动化仪表的通讯模块的设计方法2023-10-18 529
-
基于物联网的家庭自动化2023-02-07 667
-
使用物联网的家庭自动化2023-02-02 889
-
简单家庭自动化或工业自动化物联网解决方案2022-12-01 1024
-
使用NodeMCU的基于物联网的家庭自动化2022-11-01 826
-
基于CAN总线技术的工业自动化中应用2022-09-26 2277
-
物联网家庭自动化会受到什么因素的趋势影响2020-04-22 1563
-
为何LED生产半自动化比全自动化更受欢迎?2016-03-21 7695
-
物联网怎么普及工业自动化2016-03-16 5136
-
工业领域物联网技术2016-01-24 4619
-
浅谈现场总线及对自动化领域的影响2009-08-12 702
全部0条评论

快来发表一下你的评论吧 !
