

功能安全和联网
描述
在写了关于机器人、协作机器人和机器人功能安全要求的博客后,我认为解决网络的功能安全要求会很有趣。这两个主题是联系在一起的,因为大多数机器人都将联网,因为机器人是工业4.0的重要组成部分。
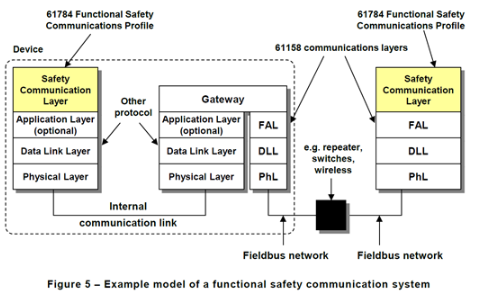
IEC 61508中很少提到网络,只有IEC 61508-2:2010条款7.4.11提供了许多指导,其中它提供了白色通道和黑色通道方法,并将用户推荐给IEC 61784-3或IEC 62280系列。使用白通道方法,包括两端通信设备在内的整个网络都按照相关的功能安全标准进行开发。这将是一项艰巨的工作,并限制标准网络组件的使用。更常见的方法是使用黑色通道,其中不对通道进行任何假设,并且通过应用软件中的附加SCL(安全通信层)来确保安全性。该标准及校正实验所是根据安全标准开发的,但通信系统中的其他所有内容都只是标准组件。下图取自IEC 61784-3标准。
IEC 61784-3 是现场总线标准,IEC 62280 系列(也称为 EN 50159)涵盖列车。EN 50159给出了一系列威胁以及针对这些威胁的可能防御措施列表。对于每个威胁,SCL 必须至少实施一个防御措施,请参见下文。
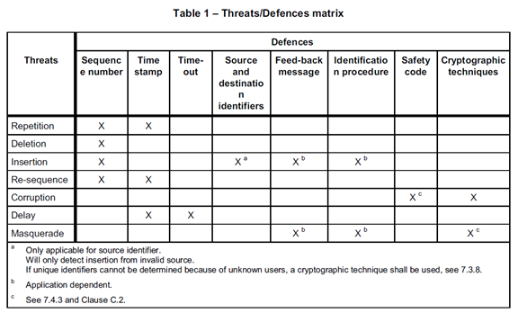
对于机器的安全性,超时防御特别令人感兴趣。它有效地实现了看门狗定时器,例如,如果机器人没有收到通信,那么在指定的时间间隔后,它将机器人带到安全状态。
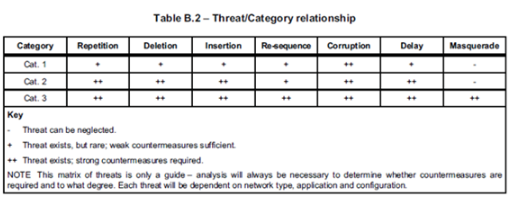
此外,EN2的表B.50159也令人感兴趣。它列出了各种类别的网络,并将每个威胁确定为可以忽略不计,需要一些保护或需要强有力的对策。类别1网络可以被视为机器人或协作机器人中的封闭网络,或者可能是模数转换器和本地微控制器之间的接口。类别 1 网络具有已知的固定最大用户数和未经授权的访问机会有限。另一方面,类别 3 网络可能类似于无线网络,通常比有线网络有更多的未经授权的访问机会。
白色通道方法并未广泛使用,但我想知道诸如TSN(时间敏感网络)之类的新要求是否会改变这一点。这可能是未来博客的一个好话题。
审核编辑:郭婷
-
【小e物联网申请】基于小e物联网开发平台的厨房安全系统。2016-06-06 2688
-
物联网时代百亿设备大爆发 世界安全该如何守护?2016-12-10 2917
-
直击物联网安全问题:机智云与斗象科技建物联网安全实验室2016-12-30 2944
-
如何保障物联网设备安全2018-09-07 5687
-
物联网安全那些事,你知多少?2018-10-29 3423
-
AI:对物联网安全的影响2019-05-29 3374
-
物联网面临的安全问题2019-07-19 2725
-
平台安全架构对物联网安全的影响2019-07-22 1972
-
物联网安全如何保证?2019-08-09 2971
-
物联网成信息安全“重灾区”2020-02-14 3481
-
物联网通信安全需求如何实现2020-06-05 1963
-
物联网安全的守则2021-01-22 1653
-
物联网时代如何才能确保SoC的安全?2021-05-20 1521
-
如何构建安全的物联网架构2021-11-03 2154
-
新唐对应四大物联网安全攻击的保护措施2023-08-21 628
全部0条评论

快来发表一下你的评论吧 !
