

工业机器人的结构特点和性能
电子说
描述
无锡金红鹰工业自动化有限公司是一家设计生产工业机器人及提供机器人工业自动化系统解决方案的高新技术企业。如果您对焊接机器人感兴趣,可以联系无锡金红鹰,我们是专业的工业机器人集成商,提供机器人系统设计、生产、销售及售后一站式服务。
工业机器人的结构特点
和其他机器设计相比,工业机器人在结构上有很多独特之处,主要可以归纳为以下几点:

无锡金红鹰焊接机器人及控制柜
1.工业机器人操作机可以简化成各连杆首尾相接,末端开放的一个开式连杆系(也可能存在部分闭链结构),连杆末端一般无法加以支撑,因而操作机的结构刚度差。
2.在组成操作机的开式连杆系中,每根连杆都其有独立的驱动器,因而属于主动连杆系。不同连杆之间的运动没有依从关系,操作机的运动更为灵话,但控制起来也更复杂。
3.连杆驱动转矩在运动过程中的变化规律比较复杂,连杆的驱动属于伺服控制型,对机械传动系统的刚度、间隙和运动精度都有较高的要求。
4.连杆的受力状态、刚度条件和动态性能都随位姿的改变而变化,因此容易发生振动或其它不稳定现象。
工业机器人性能评判指标
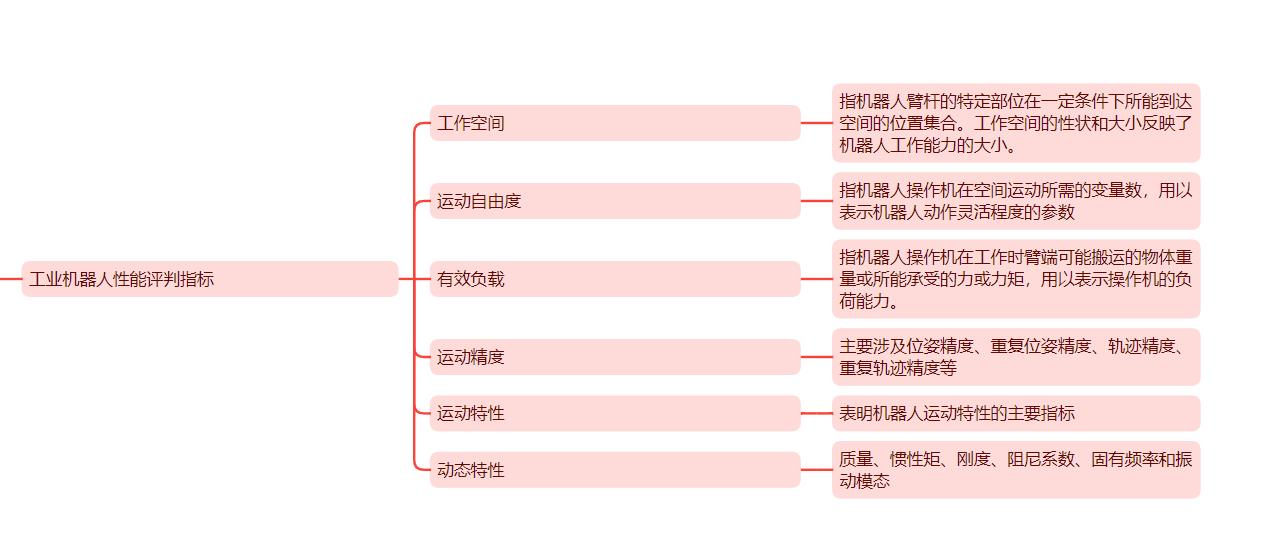
表示机器人特性的基本参数和性能指标主要有工作空间、自由度、有效负载、运动精度、运动特性、动态特性等。
工业机器人性能指标
工作空间是指机器人臂杆的特定部位在一定条件下所能到达空间的位置集合。工作空间的性状和大小反映了机器人工作能力的大小。
(1)通常工业机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,机器人实际所能达到的工作空间。
(2)机器人说明书上提供的工作空间往往要小于运动学意义上的空间。这是因为在可达空间中,手臂位姿不同时有效负载、允许达到的速度和加速度都不一样,在臂杆位置允许的极限值通常要比其他位置的小些。此外,在机器人的可达空间边界上可能存在自由度退化的问题,此时的位姿称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度进化现象,这部分工作空间在机器人工作时都不能被利用。
(3)除了在工作边缘,实际应用中的工业机器人还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
2.运动自由度
运动自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
自由物体在空间自六个自由度(三个转动自由度和三个移动自由度)。工业机器人往往是个开式连杆系,每个关节运动副只有一个自由度,因此通常机器人的自由度数目就等于其关节数。机器人的自由度数目越多,功能就越强。
目前工业机器人通常具有4—6个自由度。当机器人的关节数(自由度)增加到对末端执行器的定向和定位不再起作用时,便出现了冗余自由度。冗余度的出现增加了机器人工作的灵活型,但也使控制变得更加复杂。
工业机器人在运动方式上,总可以分为直线运动(简记为P)和旋转运动(简记为R)两种,应用简记符号P和R可以表示操作机运动自由度的特点,如RPRR表示机器人操作机具有四个自由度,从基座开始到臂端,关节运动的方式依次为旋转-直线-旋转-旋转。此外,工业机器人的运动自由度还有运动范围的限制。

无锡金红鹰焊接机器人参数
有效负载是指机器人操作机在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示操作机的负荷能力。
机器人在不同位姿时,允许的可搬运质量是不同的,因此机器人的额定可搬运质量是指其臂杆在工作空间中任意位姿时腕关节端部都能搬运的质量。
4.运动精度
机器人机械系统的精度主要涉及位姿精度、重复位姿精度、轨迹精度、重复轨迹精度等。
位姿精度是指指令位姿和从同一方向接近该指令位姿时的实到位姿中心之间的偏差。重复位姿精度是指对同指令位姿从同一方向重复响应n次后实到位姿的不一致程度。
轨迹精度是指机器人机械接口从同一方向n次跟随指令轨迹的接近程度。轨迹重复精度是指对一给定轨迹在同方向跟随n次后实到轨迹之间的不一致程度。
5.运动特性
速度和加速度是表明机器人运动特性的主要指标。在机器人说明书中,通常提供了主要运动自由度的稳定速度,但在实际应用中单纯考虑稳定速度是不够的,还应注意其允许加速度。
6.动态特性
动态特性结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
审核编辑:汤梓红
- 相关推荐
- �
-
工业机器人的基本结构2015-01-19 0
-
什么是工业机器人2015-01-19 0
-
核工业机器人特点及现状简述2017-08-07 0
-
六轴工业机器人的主要特点2017-08-08 0
-
工业机器人按驱动方式可分为哪些?2017-12-01 0
-
工业机器人结构、驱动及技术指标详解2018-10-12 0
-
工业机器人的技术原理2018-11-23 0
-
工业机器人组成结构相关资料分享2021-07-05 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
工业机器人可分为哪几种2021-09-07 0
-
【盘点】工业机器人技术性能特点2016-05-27 1326
-
工业机器人的性能及特点2017-10-14 1673
-
工业机器人技术的特点是什么2019-09-11 6130
-
工业机器人的结构特点和构组成2020-05-19 14795
-
工业码垛机器人的特点2022-12-15 1049
全部0条评论

快来发表一下你的评论吧 !
