

自制一个遥控汽车的教程
描述
遥控汽车也称为遥控车,是每个电子爱好者都喜欢建造的东西。但他们中的大多数人不知道从哪里开始以及如何构建它,有些人甚至被它复杂的外观所欺骗。本文的重点是指导业余爱好者用最少的组件构建自己的自制遥控车。
方框图:
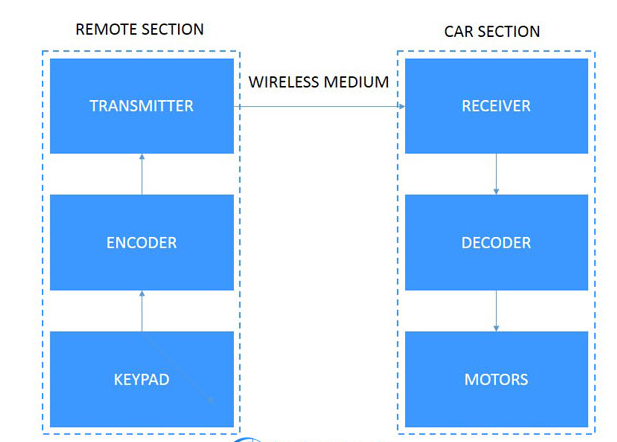
要制造遥控车,我们需要确保这些块可用。以上模块分为两个部分 远程 和 汽车
为了理解的目的。从控制汽车运动的键盘开始,而编码器和解码器旨在编码和解码运动信号以实现安全传输。发射器还通过无线介质发送运动信号,接收器获取目的地的信号。
遥控器电路图:
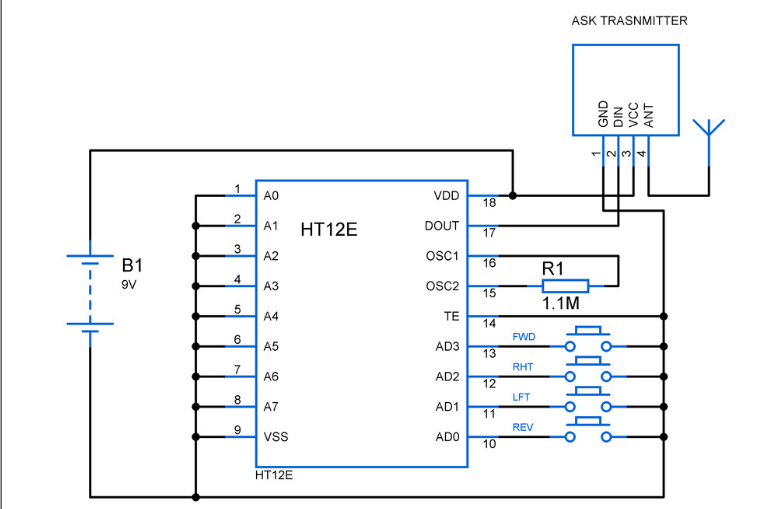
上述遥控电路由三个重要部件键盘、编码器IC HT12E和射频发射器RF433模块组成。
键盘:
遥控器的键盘由四个单独的按钮组成,这些按钮连接到编码器IC的数据引脚AD0至AD3的数据引脚。当按下这些按钮时,它将运动信号传递给编码器,
编码器
HT12E:该编码器用于对各个按钮馈送的运动信号进行编码。数据引脚AD0至AD3为低电平有效,因此按下按钮闭合电路,逻辑1或高信号馈送到这些引脚。它还包含地址引脚A0至A7,允许我们尝试不同的地址组合以确保数据传输的安全,但请确保您在接收端(解码器)中使用相同的地址组合。在上面的电路中,我们没有尝试任何地址组合,因此所有引脚都接地。Dout
引脚提供编码的输出数据。
RF433 TX:这是一个简单的RF433
TX模块,工作频率为433MHz。来自编码器的编码数据被馈送到TX的DIN引脚,一个简单的天线连接到其第4个引脚。
振荡器频率:HT12E的振荡器频率为3.25Khz(请参阅数据表中的振荡频率与电源电压的关系图)。这个频率是用电阻R1(1.1M)固定的。修改此电阻值将改变输出频率。
遥控车电路图:
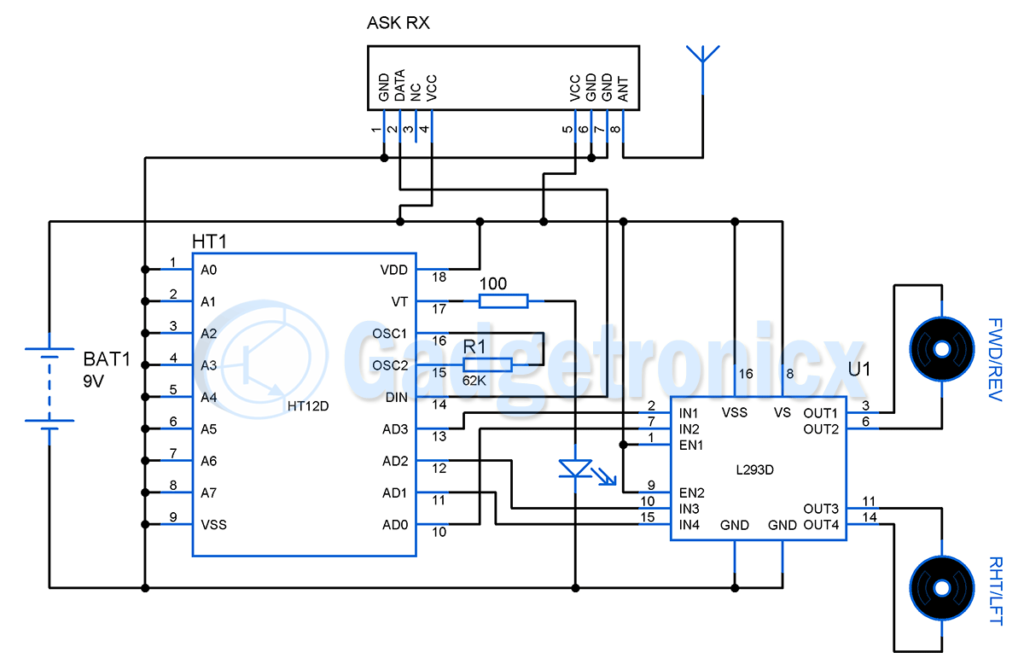
RF433 接收:这是一个简单的RF433
RX模块,工作频率为433MHz。接收到的编码数据信号通过天线接收,信号从DATA引脚获得,馈送给解码器。
HT12D 解码器:来自 RX 模块的编码信号被馈送到解码器的 DIN
引脚。然后由解码器解码信号,如果有的话,请记住使用编码器中使用的相同地址组合,否则运动信号将被错误解释。解码器还包括VT引脚,如果建立任何RF链路,则用作标识,LED连接到该引脚进行识别。
振荡频率:为了成功接收输入信号并对其进行解码,HT12D 振荡频率应为编码器振荡频率的 50
倍。在我们的例子中,HT12E振荡频率为3.25Khz,因此我们的解码器振荡频率应为162.5Khz。将R1的值固定为62K即可完成这项工作(请参阅数据表中的振荡频率与电源电压的关系图)。
L293D:该 IC 用作双向电机驱动器。使用解码器IC驱动电机等重负载是极不可能的,因此我们为此目的使用了专用的L293D
IC。阅读更多关于L293D工作的信息。
电机:两个简单的直流电机用于RC车的运动。一个电机,用于向前和向后移动汽车,而另一个用于左右驾驶汽车。
遥控车运动机构:
我们已经完成了遥控器和即将放置在车内的电路。现在,下一个重要的事情是提供将我们的RC汽车前后移动的机制。将齿轮固定在电机和连接后轮的导轨上。将电机靠近导轨中的齿轮固定,以便在电机运动时汽车向前移动。同样,当电机以相反方向旋转时,汽车应该向后移动。
汽车转向机构:
转向机构比运动机构有点棘手,因为它需要一些机械装置。在制造遥控汽车时使用了几种转向机构,但在这里我更喜欢使用“齿轮齿条”布置来引导汽车朝着我们想要的方向行驶。

上面的动画显示了齿轮齿条转向机构的工作。在这里,小齿轮将连接到我们负责右/左转向的前电机上。因此,当该电机顺时针方向移动时,汽车左转,反之亦然。
所需零件:
RF433 MHz TX 和 RX
编码器 HT12E 和解码器 HT12D
L293D – 1
电机 – 2
轮子 – 4
电阻器 – 根据需要
发光二极管
希望这个项目对您有所帮助。在我们的网站上查看其他电子项目。如果您对这个项目有任何反馈或意见,请将它们留在下面的评论部分。
-
自制遥控开关电路图2023-05-02 9533
-
分享一个简单的遥控小汽车电路设计示例2023-04-13 2066
-
如何在家自制遥控气垫船2022-07-20 1108
-
自制一个万能遥控器2022-06-17 1472
-
如何自制一个红外遥控LED电子钟2020-06-21 5910
-
关于自制一款简易遥控开关2020-02-15 3238
-
最简单自制遥控开关电路(五款自制遥控开关电路)2018-01-29 121453
-
DIY:自制遥控万色返空蛋2017-01-12 731
-
自制红外遥控解码器2015-05-05 11764
-
用PVC管自制遥控火车模型的教程图解2012-12-29 13279
-
自制红外遥控器2012-10-29 3625
-
自制PC遥控器2011-12-27 11968
-
红外遥控器DIY自制2011-12-22 25263
全部0条评论

快来发表一下你的评论吧 !
