

所有行业的DAQ:为双极性输入增加增益
描述
在今天的文章中,我们将介绍一种可用于将ADAQ798x连接到双极性传感器和输入源的配置。这些类型的信号在工业和数据采集应用中很常见。此配置基于我们之前讨论的同相配置,用于将双极性信号转换为单极性信号,用于集成ADC。
同相求和配置
双极性信号在地上和地以下摆动(0 V)。由于ADAQ798x的集成ADC只能转换0 V和V之间的信号裁判,双极性信号需要针对ADC进行直流偏置和适当缩放。以下配置通过添加两个电阻(R1和 R2) 到标准同相配置。
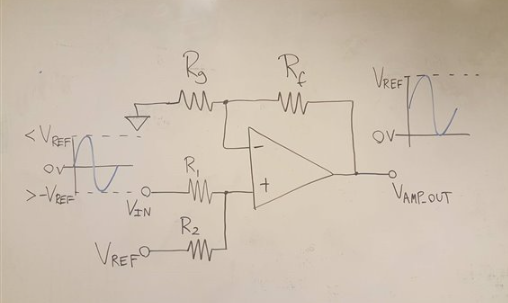
此配置通过将输入信号与单独的直流电压相加,将ADC驱动器的输出偏置至ADC的中间电平输入(V裁判/2).使用参考源 (V裁判),因为直流电压通常很实用,因为它无需额外的电路(无论如何,ADAQ798x始终配有基准电压源!它还可以防止 V 偏差裁判增加系统失调误差,因为ADC驱动器的直流偏置始终是V的一半裁判.出于这些原因,我们将使用 V 专门研究此配置裁判作为直流“移位”电压。
此配置的传递函数为:

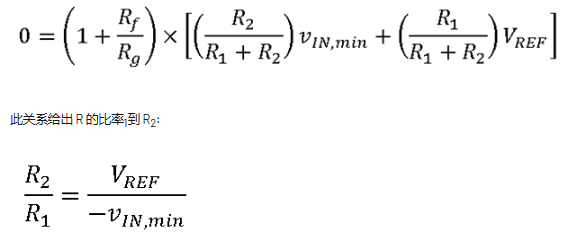
与常规同相配置类似,比率Rf和 Rg决定从IN+到AMP_OUT的增益,但该比率现在取决于v的输入幅度在也。请注意,v在是双极性的,但同相节点上的电压是单极性的。这意味着对于 v 的最小值在,IN+ 上的电压必须为 0 V:
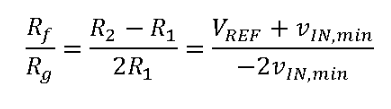
Rf 和 Rg 可以使用配置的传递函数确定,并且当 vIN 为 0 V 时,ADC 驱动器 (vAMP_OUT) 的输出等于 VREF/2 的条件。 求解 Rf 和 Rg 的方程可得到:
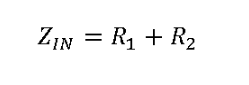
我们现在有 R 的比率1到 R2和 Rf到 Rg,但我们仍然需要选择特定的值。我们解决了选择 R 的问题f和 Rg我们上一篇文章中的值。R1和 R2应根据应用的噪声、精度和输入阻抗要求来确定选择。小电阻将改善噪声,并可以减少其与ADC驱动器输入偏置电流相互作用引起的失调误差(参见MT-038和CN-0393),但需要大电阻来增加输入阻抗并降低基准电压源的输出电流。该电路的输入阻抗为:
注意,对于具体情况下,幅度为 v在是 ±V裁判,R的比率f到 Rg为 0。在这种情况下,ADC驱动器增益为1,这意味着Rg省略和 Rf可以是 0 Ω。
让我们看一个示例,其中ADAQ7980需要对±1 V输入信号进行双极性至单极性转换,电压为VREF= 5 V 并使用 Rf= 2 kΩ。使用上述等式,R2必须是 R 的 5 倍1和 Rf必须是 R 的 2 倍g.由于 Rf为 2 kΩ, Rg必须为 1 kΩ。R 的特定值1和 R2可根据应用要求进行选择。对于此示例,我们将选择R1和 R2这抵消了输入偏置电流对失调误差的影响。MT-038 解释 R1||R2应等于 Rf||Rg来实现这一点,这给了 R1= 800 Ω 和 R2= 4 kΩ。
但让我们也考虑一个例子,其中vIN = ±10 V和with VREF = 5 V。在这种情况下,我们遇到了一个问题,其中 R 的比率f和 Rg是一个负数,因此我们实际上无法通过此配置实现此输入范围。事实上,最大的v在与此配置一起使用的是 ±V裁判,其中ADC驱动器增益等于1。幸运的是,我们将研究另外两种配置,它们将允许我们在将来的本系列条目中超越此输入范围!
结语
上述配置也可以通过连接R用于单极性信号2接地而不是VREF.这种修改对于需要为ADC衰减的单极性输入信号非常有用(幅度为>V裁判).在这种情况下,ADC驱动器很可能处于单位增益,因此Rf 和Rg不是必需的。
如上所述,如果应用需要高输入阻抗,则R1和 R2必须很大,这会增加系统的本底噪声。我们可以通过增加一个并联电容和/或通过过采样和抽取来补偿增加的噪声。这两种选择都牺牲了输入信号带宽以降低本底噪声。然而,对于低带宽或直流应用,输入带宽并不那么重要。因此,这些配置更适合低带宽、高输入阻抗应用。我们将在下一篇文章中更详细地讨论这一点。
然而,这没有解决的一个问题是ADC驱动器的输入偏置电流流过电阻引起的失调误差。大电阻导致较大的直流误差。通过调整R的比率,可以以牺牲某些输入范围为代价来减小该误差1和 R2以补偿不需要的压降,或通过选择 Rf和 Rg抵消由 R 引起的偏移的值1和 R2.但是,请记住,Rf必须足够小以确保放大器的稳定性,因此第二种选择并不总是可行的。
审核编辑:郭婷
-
一种可用来将ADAQ798x与双极性传感器和输入源接口的配置2023-12-11 534
-
如何支持存在大差分偏移电压的应用而不需要增加增益级?2023-10-23 1137
-
所有行业的数据采集:双极性输入的另一种配置2023-06-30 2215
-
陷波滤波器可降低放大器峰值并增加增益平坦度2023-02-01 4454
-
双极性ADC和差分ADC中的失调误差和增益误差2023-01-27 9270
-
ADC驱动器配置方案:如何增加双极性输入的增益资料下载2021-04-02 1192
-
全能DAQ ADAQ798x如何增加双极性输入的增益2018-11-01 2183
-
全能DAQ ADAQ798x实现衰减双极性输入的ADC驱动器配置2018-10-11 2104
-
全能DAQ ADAQ798x双极性输入的另一种配置2018-10-10 1512
-
附加增益电路图2009-06-27 533
全部0条评论

快来发表一下你的评论吧 !
