

一文彻底搞懂前馈控制
工业控制
描述
前言
控制方式主要可分为反馈控制和前馈控制两类。通常,我们的注意力集中在反馈控制上,因为反馈控制可以稳定系统并同时满足一些鲁棒性要求以及饱和限制。然而,当控制系统出现较大的扰动或需要提升跟踪快速性能时,前馈控制也是必不可少的,尤其是在工业过程中。
前馈控制在人体系统中很常见,比如行走、打篮球和开车等等。
当你行走在大街上,看到前方5米处有障碍物时:
- 反馈控制:继续向前走5米,撞到障碍物后,身体得到疼痛反馈,然后绕开;
- 前馈控制:你会直接绕过障碍物,而不是继续向前行走直到撞上障碍物.
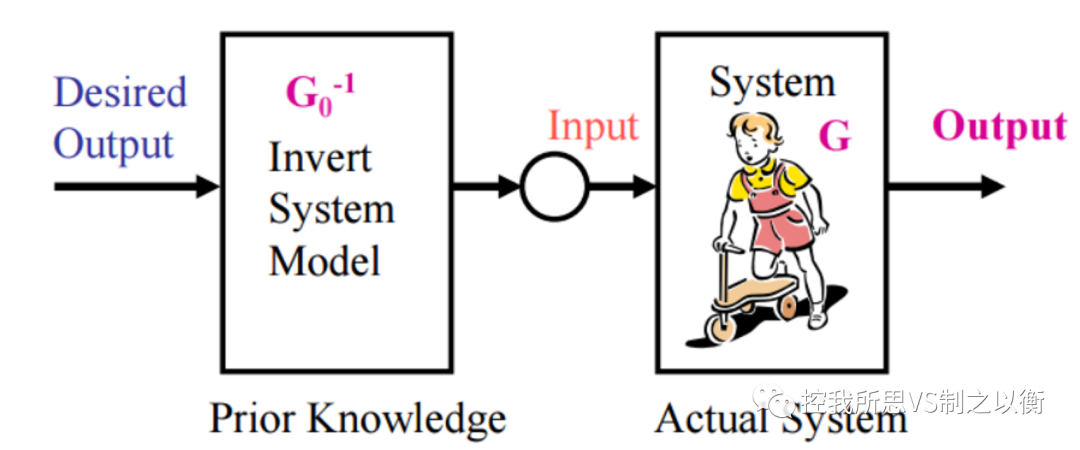
在这个案例中,由人体的眼睛得到先验信息(Prior Knowledge),然后即进行前馈控制(重新规划自己的行走路径),避免了走到障碍物面前再重新规划路径所额外耗费的时间和能量(反馈控制)。
据此可简单总结 前馈控制的优势 :
- 系统响应速度更快:前馈控制传递输入信号前,根据物理模型预测被控对象的输出结果,可以提前补偿系统中预知的干扰,进而减小系统的响应延迟。
- 可以更好地处理非线性系统:前馈控制可以预测非线性系统引起的干扰,并在输入控制量中提前加以补偿,因此可以提高控制系统的响应准确度和稳定性。
- 对于系统的模型不确定性更为鲁棒:前馈控制预测控制量是基于被控对象的模型,可以适用于模型存在误差、摩擦或其他非理想状态的情况。
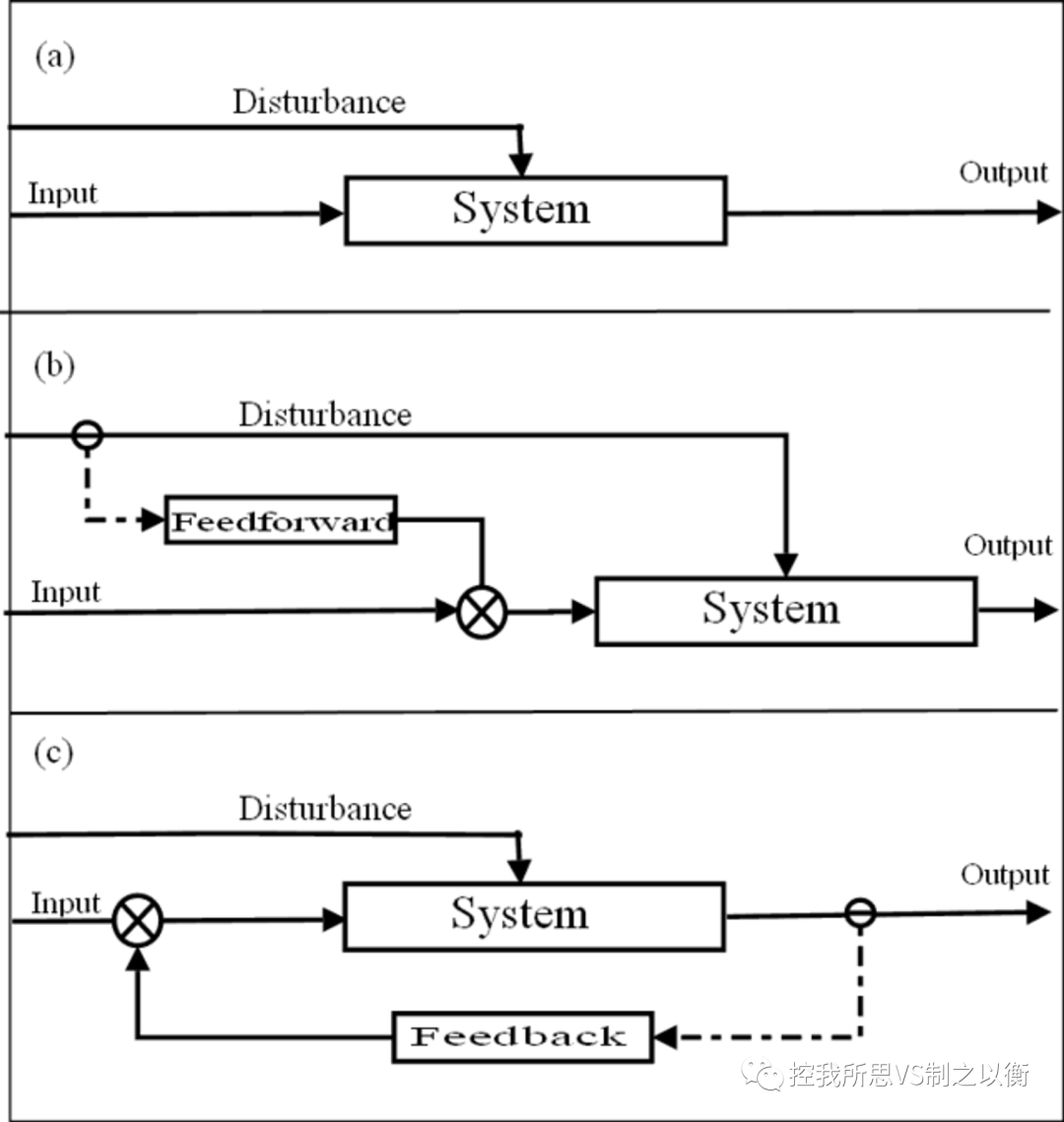
虽然前馈系统能够检测(或预测)到干扰并提前采取行动,但是前馈控制器通常基于被控系统的传递函数的反函数来设计的, 过度的依赖于先验信息 ,因此对模型误差具有较低的容忍度,存在非理想因素时,需要对模型和参数进行精准的调整,否则结果就可能与预期的不一致。并且容易涉及系统稳定性问题,同时无法调整系统性能,如下图(b)。因此,前馈控制系统通常需要某些特定类型的反馈控制作为补充,如下图(c)。
由于现实过程中无法获取绝对精确的理想模型,那么单独采用反函数设计的前馈控制稳定性很差,导致实际研究意义不大,所以本文不对这类前馈控制方法进行研究,仅在稳定的反馈控制系统的基础上研究前馈控制方法。
稳定性、可实现性不佳在学术上足以这种给单独使用前馈控制的方法判死刑,但在工业实际过程中依靠于工人师傅自身的经验,单独前馈控制却是较为常见的,但这样的做法实际上已经不算是“自动化”。
根据不同的控制目标,前馈控制器主要有两种:
- 以抑制扰动为目标的前馈控制(抗扰前馈控制器):在化工、热控等过程中经常使用,当干扰进入系统时,可以立即检测并消除干扰。
- 以精确跟踪为目标的前馈控制(跟踪前馈控制器):帮助系统在不改变原有闭环结构的情况下提高跟踪跟踪性能,尤其是跟踪的快速性。
抗扰前馈控制器
下图清晰展示了前馈控制器如何消除前馈-反馈控制系统中的干扰影响。一旦干扰信号进入系统,前馈控制器将其即时消除,扰动不会对控制闭环和系统输出不产生任何影响。相比之下,仅有反馈控制器的控制回路将通过所有控制路径传播扰动,导致误差信号形成并驱动反馈控制器响应。此外,扰动传播路径上的滞后时间长,对系统输出性能产生不必要的影响,可能导致过冲和控制变量振荡。为避免这些影响,值得考虑采用前馈控制器。

设用系统滞后时间与过程模型时间常数的比值来评估反馈控制器的可控性,若这个比值等于或大于1,则反馈控制通常不能消除由测量扰动引起的影响。在这种情况下,需要引入前馈控制策略,不然单凭反馈控制器无法完成扰动抑制。此外,在工业生产中,经济效益也是决定是否使用前馈控制器的关键点。
从扰动到输出的闭环传递函数为:

另外,有关抗扰前馈控制器应进行如下说明:
(1) 设计前馈控制器时,需要预先或在线测量过程干扰。
(2) 前馈控制器的有效性主要取决于受控过程模型的准确性。如果过程模型存在不确定性,反馈控制器会主要处理这些问题。但是,这将增加反馈控制器的负担。
(3) 虽然理想情况下前馈控制可能存在物理实现上的困难,但在这种情况下,取近似值得方法可以提供有效的解决方法。
跟踪前馈控制器

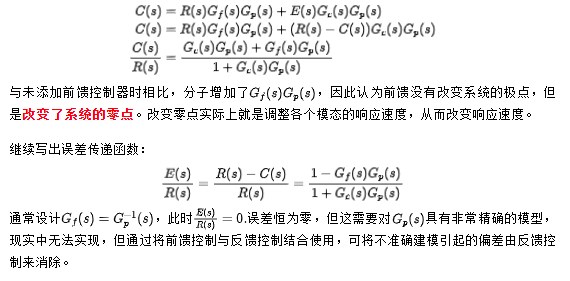
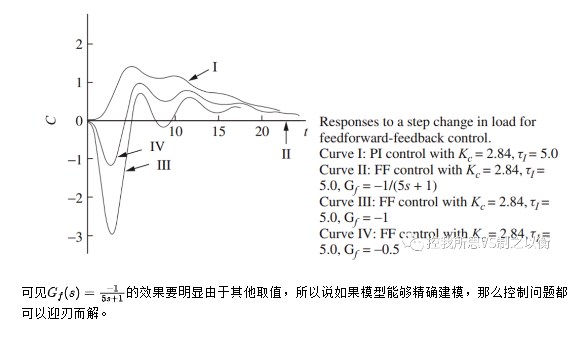
由上图计算系统传递函数:
案例分析-前馈控制器可实现
考虑如图所示的化学成分控制系统,扰动作用在预处理箱(Preconditioning tank),输出在水箱3(Tank3)处,采用PI控制器。

设预处理箱的传递函数为


案例分析-前馈控制器不可实现

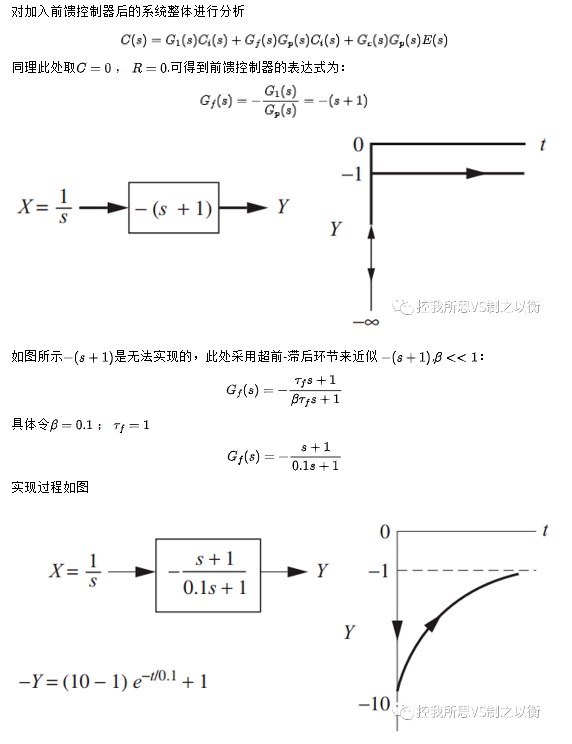

-
一文搞懂UPS主要内容2021-09-15 2068
-
电流环的前馈补偿控制是什么2021-09-30 2832
-
滞后系统的前馈——反馈预估控制2009-08-10 827
-
具有神经网络前馈控制器的污水处理模糊控制系统设计2012-08-29 1039
-
一种基于直流电压前馈控制的逆变电源设计2016-03-31 973
-
前馈控制在复卷机调速系统中的应用2016-05-03 685
-
基于前馈控制的有源电力滤波器研制_唐欣2016-05-10 608
-
根据伺服系统的特点并结合PID控制算法设计了一种位置前馈控制器2017-09-16 1376
-
飞机机翼喷漆机器人精确动态前馈控制的实现方法详细资料说明2019-04-09 1606
-
前馈控制系统与反馈控制系统的区别2024-06-17 9182
-
一文带你彻底搞懂K8s网络2026-02-06 1076
全部0条评论

快来发表一下你的评论吧 !
