

自动驾驶仿真验证——天气因素对传感器探测模型的影响与建模
描述
01
前言
SAIMO
自动驾驶汽车和自动驾驶系统是当今汽车领域最前沿的技术。自从汽车诞生以来,没有一种技术能以如此革命性的方式改变汽车行业。自动驾驶汽车致力于自动化的安全驾驶,并为行动不便的人们增加了使用交通工具的机会。自动驾驶汽车正在从根本上改变人和货物的运输方式,有望显著地造福未来社会。
然而,由于自动驾驶技术还未完善,为了确保安全和验证场景,难以让自动驾驶汽车广泛地进行实车验证。目前,一套行之有效的方法是利用仿真系统验证自动驾驶算法。这套方案已经得到行业认可,并涌现出大量仿真理论及应用软件,可以在安全性和成本等方面发挥重要作用。
自动驾驶算法由感知、决策和车辆控制等模块构成。在仿真环境中,还原真实车辆的雷达感知系统尤为重要,因为车辆后续的决策算法都需要基于感知系统的输出数据。赛目科技针对自动驾驶仿真中的雷达感知系统在不同天气环境下的表现,展开研究与讨论。
02
自动驾驶传感器感知系统仿真
SAIMO
自动驾驶车辆的传感器组件包括毫米波传感器、激光传感器、相机传感器和超声波传感器等多种类型。每种传感器都有其独特的功能和特性,因此对它们进行建模和研究具有挑战性。尤其是在自动驾驶仿真验证需求日益增加,精度要求也越来越高的情况下,传统的真值模型已经无法满足验证需求。
传感器内部电子器件的特性、结构和数据采集处理算法等属于“黑盒”,难以获取。同时,环境因素对传感器感知系统的影响无法忽略。例如,毫米波传感器受到目标电磁散射、地表杂波、环境噪声和目标截面积(RCS)的影响;激光传感器受到目标反射率和多次反射的影响;相机传感器受到光线衍射和环境光等的影响。因此,对于自动驾驶传感器感知系统仿真,需要考虑这些影响因素。
目前,物理传感器建模和研究是赛目科技自动驾驶传感器感知系统仿真中的重点研究方向。物理建模旨在构建足够还原真实传感器特性的数学模型,从而提高自动驾驶仿真验证在感知方面的能力。在物理传感器模型中,天气影响是一个极为重要的影响因素,因为天气对所有传感器都会产生影响,而且在真实场景中非常普遍。因此,针对不同天气环境对不同传感器的影响进行建模对自动驾驶传感器感知系统仿真具有重大意义。赛目科技致力于还原天气因素对自动驾驶感知系统的影响,利用数学建模与实测数据结合,针对不同传感器与不同类型的环境,提出了一套设计方案。
03
天气因素对传感器的影响
SAIMO
天气因素多种多样,本文主要讨论雨雪雾等常规天气。不同的天气对不同的传感器影响也不相同。如雾,对毫米波雷达的影响很小,通常考虑毫米波雷达的功率衰减即可;但对于激光雷达,脉冲波的波长很小,脉冲波会撞击空气中的水粒子导致产生杂波(如图1)。
图1:激光雷达返回(顶部)场景中的雾。颜色由左边的激光雷达通道和右边的强度。地面点已被去除,以更好地看到由雾引入的点[1]。
不同的天气种类会由于电磁波,脉冲波的碰撞到雨雪雾粒子而产生杂波,导致探测过程中出现杂点,但这种现象是真实存在的,需要在仿真中再现这种效果。同时,由于波具有一定的穿透性,空气中的雨雪雾粒子也会使得雷达的功率更快地衰减。赛目科技针对传感器发射功率衰减以及环境反射杂波两个方面进行构思,并提出一套基于这两方面影响的环境建模方案。
04
天气模型
SAIMO
针对毫米波传感器与激光传感器,天气模型影响的是两个方面,其中一个是对发射功率的衰减,目前已经有很多这方面的研究并且有仿真软件已经支持这个功能。对于衰减模型,针对不同的天气与传感器,可以使用函数
来表示距离R下目标的衰减,其中参数 用于标定不同天气,在不同程度下对不同雷达的影响,其中x表示该天气的程度大小。该参数对不同规格的雷达也具有敏感性,通常需要通过实测数据标定才能获取。
对于杂波生成模型,难点在于两方面:
1)杂波生成的数量;
2)杂波对应的距离,如图2。
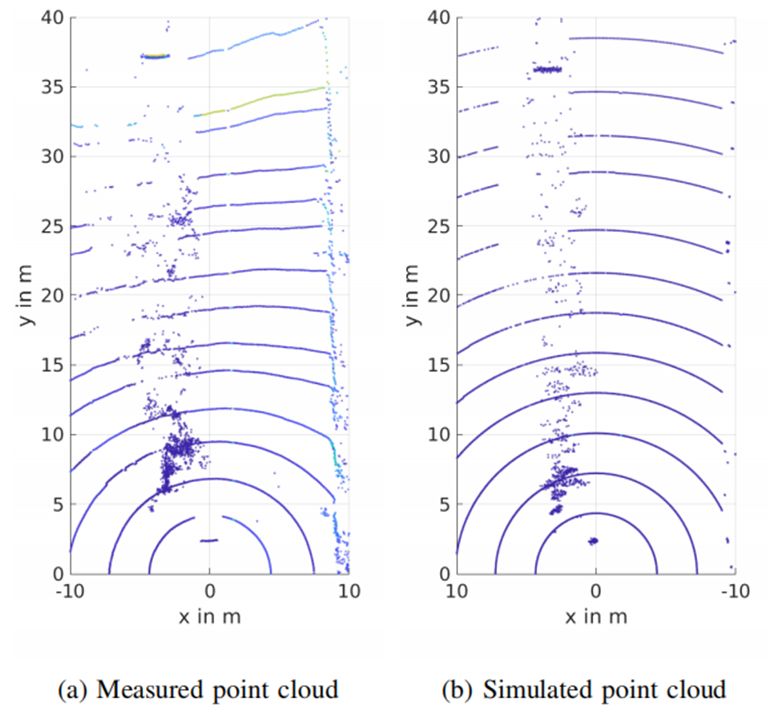
图2:激光雷达在喷雾的影响下所形成的点云信息,左为真实测量值,右为仿真值,可以观测到距离越远,杂点越少[2]。
目前已有方法从仿真环境出发,在环境中生成不同数量的随机粒子,在利用光追算法进行信号处理时,光线有可能撞击到环境中的粒子从而生成杂波信号。但是该方案有无法探测粒子后方目标以及对仿真环境需求过大的缺陷。赛目科技致力于传感器数据的实时仿真,区别于场景生成水粒子这种方法,直接在传感器运算阶段添加杂波来模拟环境因素,该方法拥有更快的运算速度。
生成杂波的数量需要通过路采数据得到 ,表示不同天气程度在不同类别传感器下生成的杂波数量。以对环境比较敏感的激光雷达为例, 需要随机分配到每一个光线射线方向上,对应的第i条射线记为 ,并记录其随机产生的方向信息 。
值得注意的是,该杂波生成数量是在接收信号构建中体现,杂波数量不等于最终生成的杂点数量,因为雷达的后处理算法会将一些回波功率底,或者并非最强回波功率的部分排除。
对于杂波对应的距离分布,有一种思路是将空间中的雨雪雾,看作是连续的水粒子,固体粒子的分层。赛目科技认为电磁波在每一层中拥有相同的反射概率,这使得反射信号的层数满足一个多项式分布。而多项式分布的极限为泊松分布。赛目科技认为,可以是使用一个泊松概率分布来体现杂波出现的距离分布
其中 表示不同天气程度在不同类别传感器下的泊松分布系数,需要实测数据支撑。第i条射线方向的距离为
就可以在场景中随机生成一定数量的,距离上满足泊松分布的杂波,其中 射线方向对应的距离与角度信息为 。由于杂波也是信号反射的结果,以激光雷达为例,在设置碰撞雨雪雾粒子反射率 后,可以计算该杂波的功率
其中 分别为激光的发射功率,增益,接受孔径和光束发散角。不同的雷达对应的回波功率公式都不相同,并且在不同模型中,其他参数也会对回波功率产生影响。这些杂波作为接收信号的一部分进入物理传感器的处理模块,功率衰减体现为弱反射物理的输出能力下降,杂波可能体现为点云或者RD图中的杂点。
05
结论与探讨
SAIMO
鉴于天气变化大/种类多的特点,自动驾驶仿真中的天气模型建模仍然存在很大的挑战。虽然利用概率模型进行建模是一种有效的方法,但是还需要进一步探索其他建模思路。例如,利用大量实测数据的数据库来提取对应天气的杂波,以更真实地模拟天气环境,但这需要有强大的数据支持。另外,在场景中构造粒子并将粒子信息返回的方法可以支持大风天气对雨雪的干扰,并还原一些扰动信息,但现有的传感器物理建模中,天气环境建模仍然是一个巨大的挑战。因此,需要继续深入研究和探索更加有效和准确的建模方法,以提高自动驾驶系统在各种复杂天气环境下的可靠性和安全性。赛目科技将会针对这些技术难点,持续进行产品的开发与迭代。
参考文献
References
[1]: Martin Hahner, Christos Sakaridis,Dengxin Dai,Luc Van Gool.
Fog Simulation on Real LiDAR Point Clouds for 3D Object Detection in Adverse Weather.
[2]: Clemens Linnhoff, Dominik Scheuble, Mario Bijelic, Lukas Elster, Philipp Rosenberger, Werner Ritter,Dengxin Dai and Hermann Winner.
Simulating Road Spray Effects in Automotive Lidar Sensor Models
SAIMO
扫描二维码
关注赛目科技

专注智能网联汽车
测试丨验证丨评价研究
原文标题:自动驾驶仿真验证——天气因素对传感器探测模型的影响与建模
文章出处:【微信公众号:赛目科技】欢迎添加关注!文章转载请注明出处。
- 相关推荐
- 热点推荐
- 赛目科技
-
未来已来,多传感器融合感知是自动驾驶破局的关键2024-04-11 2201
-
自动驾驶真的会来吗?2016-07-21 14085
-
自动驾驶的到来2017-06-08 7305
-
自动驾驶系列报告大放送了涉及传感器,芯片,执行控制等2019-08-09 3522
-
自动驾驶的五大传感器各有千秋2020-05-13 2137
-
自动驾驶汽车中传感器的分析2020-05-14 3470
-
这些自动驾驶传感器,你了解多少?2020-05-18 2859
-
从辅助驾驶到自动驾驶: 感知型车辆建立在底层高质量的传感器数据基础之上2020-06-16 2449
-
传感器成自动驾驶“硬实力” 有哪些2020-07-29 2013
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 2993
-
安森美半导体利用传感器建模技术 开展基于云的平台为自动驾驶汽车仿真2019-03-21 843
-
安森美半导体与NVIDIA合作开展基于云的自动驾驶汽车仿真2019-03-22 577
-
安森美半导体与英伟达达成合作,发力自动驾驶图像传感器建模技术2019-03-24 3890
-
浅谈自动驾驶中传感器的仿真2022-12-26 1055
-
康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证2025-07-02 4073
全部0条评论

快来发表一下你的评论吧 !
