

通过PLC和遥控器实现搬运平车的运动控制
电子说
描述
在网上看到搬运平车的介绍,搬运平车的运动控制是通过PLC和遥控器结合来控制实现的,自己就想着尝试自己写下程序来实现控制,自己写的程序通过触摸屏来进行模拟。
触摸屏软件使用是McgsPro组态软件来做简单的按钮设计,模拟程序和PLC通信进行程序的仿真进行。
1、打开McgsPro组态软件进行新建工程,在新建工程中设置参数。
打开软件
2、进行设备组态,实现McgsPro组态软件和PLC进行通信,在通信中远程控制IP是PLC的IP地址。
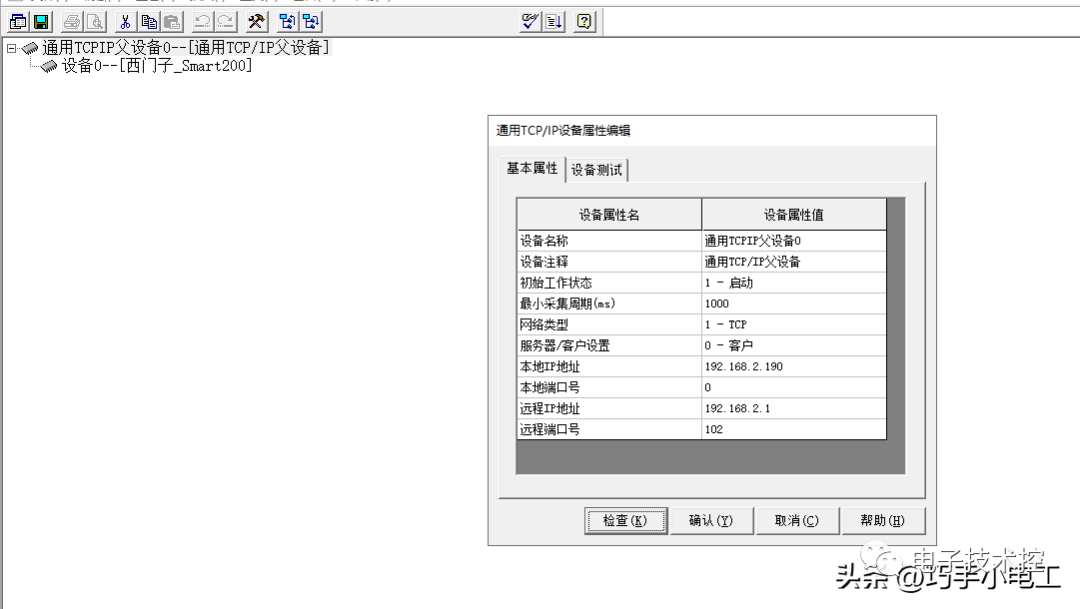
触摸屏和PLC通信
3、对参数进行设置,因为在PLC编程的时候需要用到M和Q。
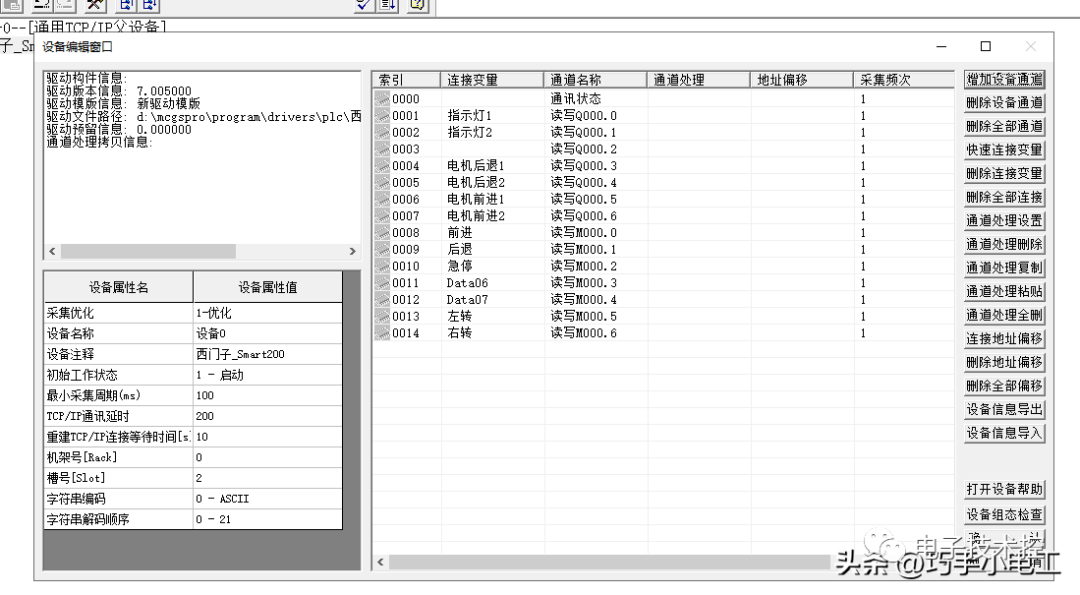
参数设置
4、对按键进行编制
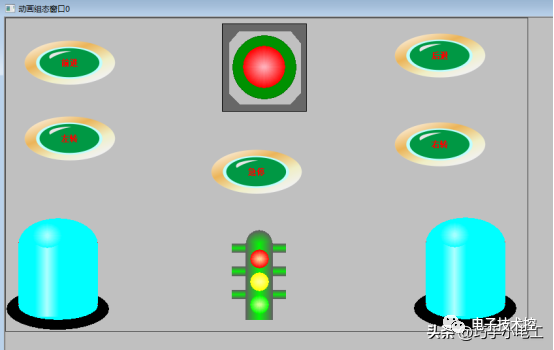
触摸屏
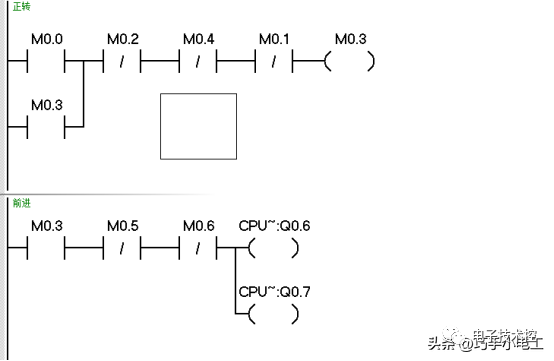
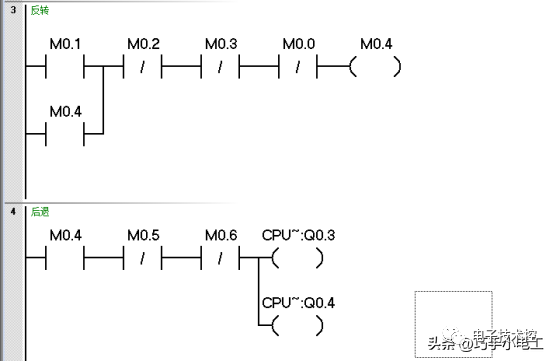
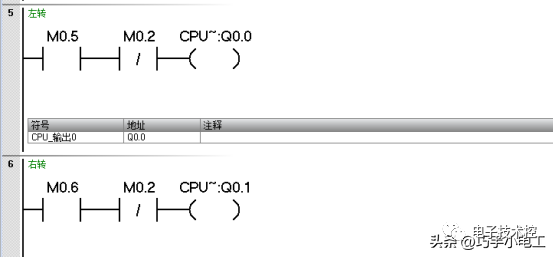
PLC编程软件使用的是STEP 7-MicroWIN SMART
程序段
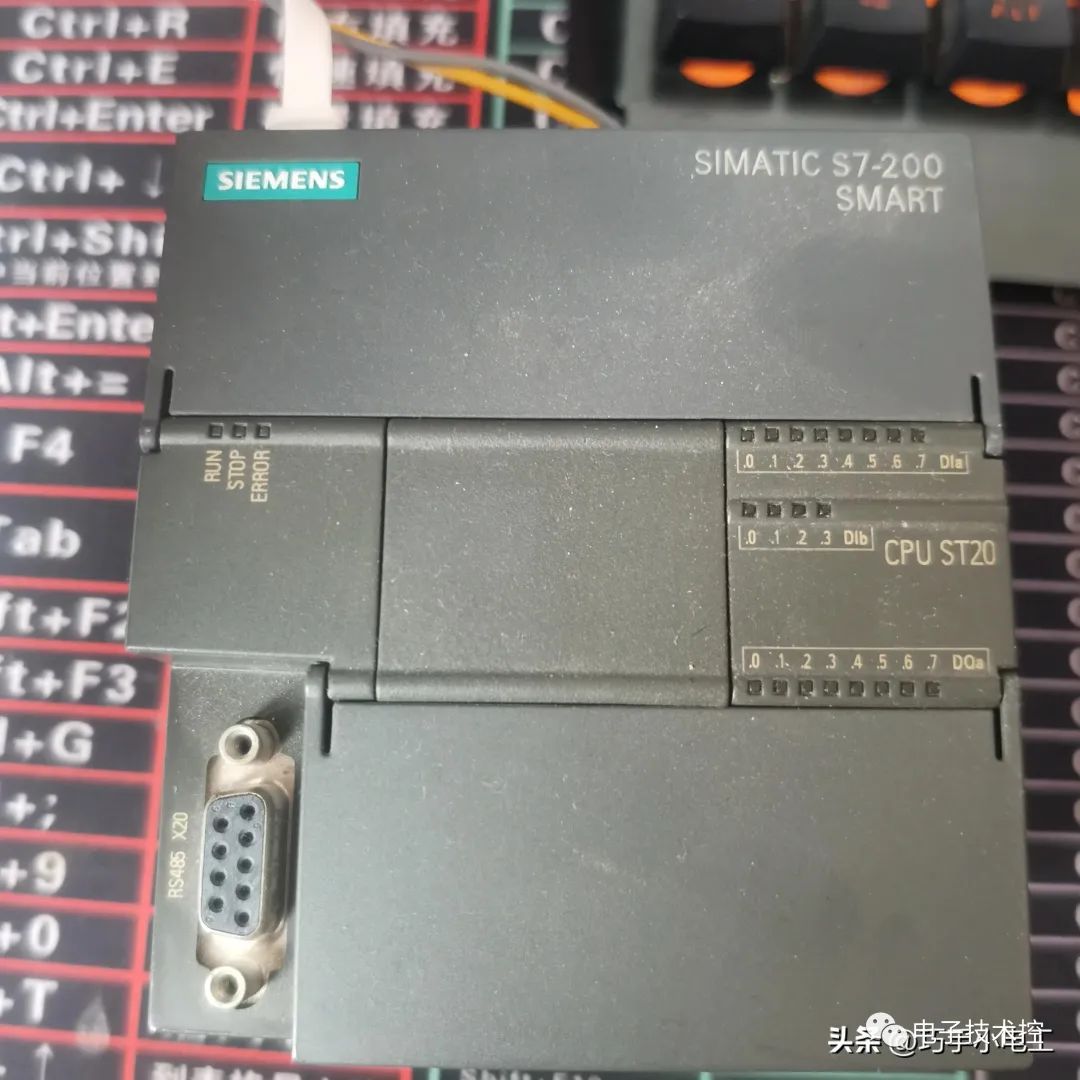
PLC使用的是SIMATIC S7-200 SMART CPU ST20
总结:
1、目前程序能够实现前进、后退、左转、右转、急停通过触摸屏的控制,但是指示灯部分还不能进行显示。
2、尝试用子程来写调用程序,但是部分功能实现(后退实现),但是前进不能调动子程出现问题。
3、程序部分还需要进行优化处理。 通过这次编程让自己找到自己学习中的很多不足,在学习中一看视频全部会,但是一动手做项目马上就报废。要想学好PLC编程,自己多动手做项目是能够快速提升自己。
延伸阅读:如何利用PLC来实现简单的搬运动作
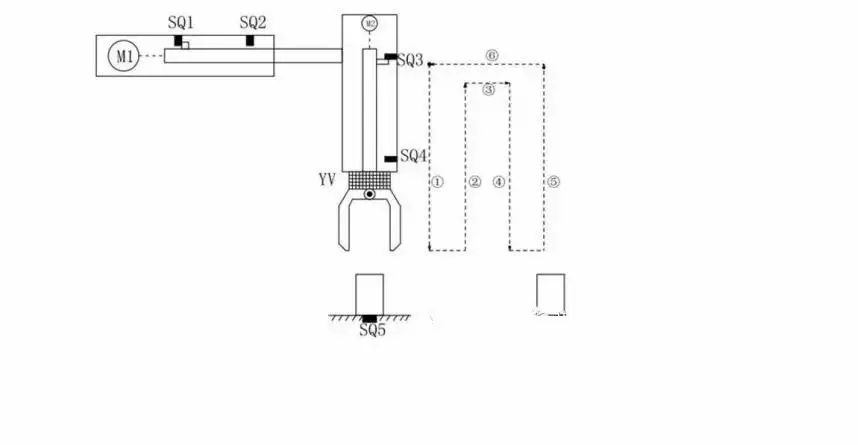
简易机械手结构图如图所示
M1为控制机械手左右移动的电动机
M2为控制机械手上下升降的电动机
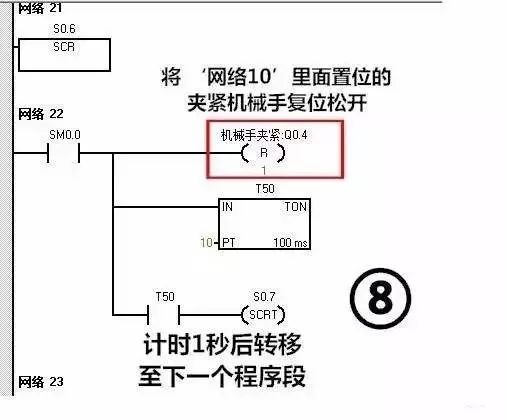
YV线圈用来控制机械手夹紧防松
SQ1为左到位检测开关
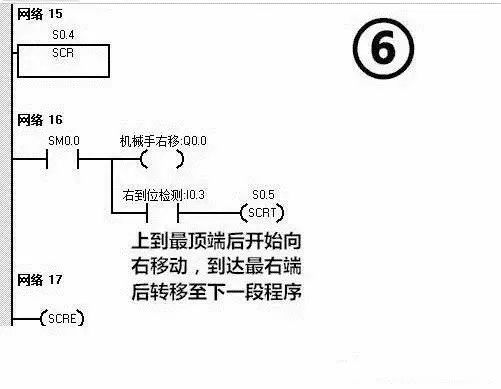
SQ2为右到位检测开关
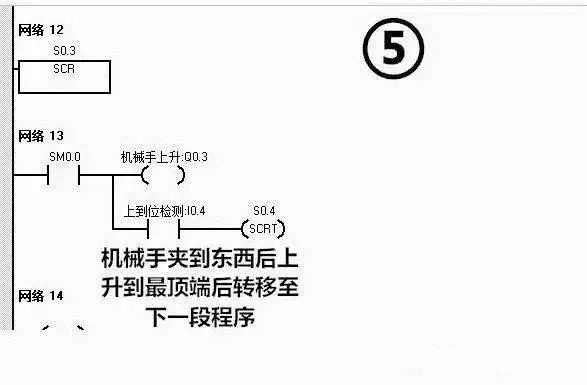
SQ3为上到位检测开关
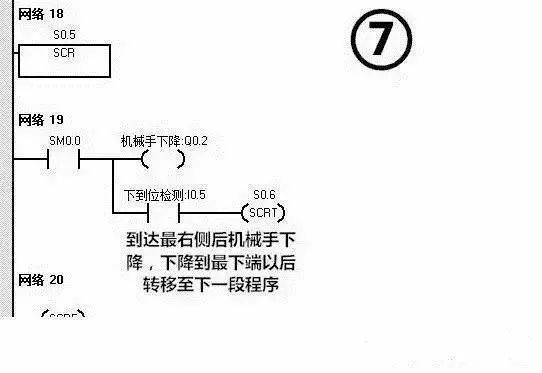
SQ4为下到位检测开关
SQ5为工件检测开关
简易机械手的控制要求如下:
机械手要将工件从工位A移到工位B 处;
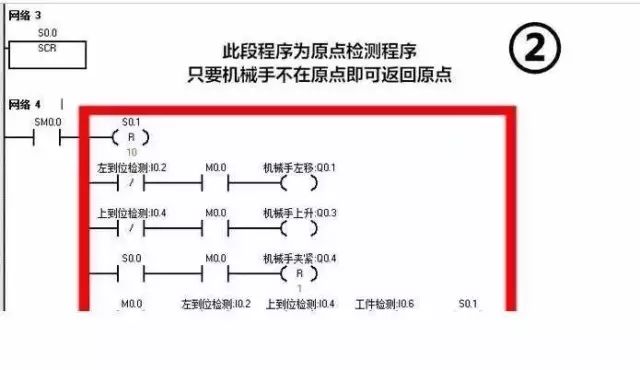
机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
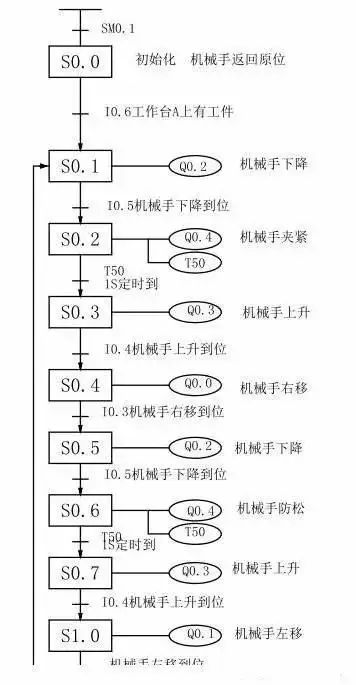
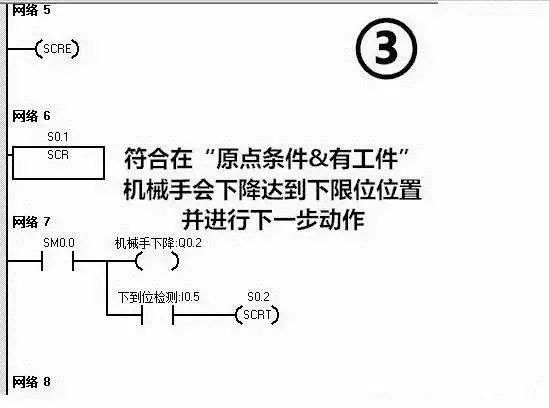
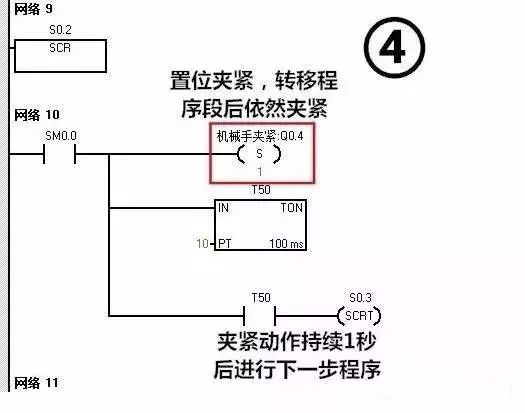
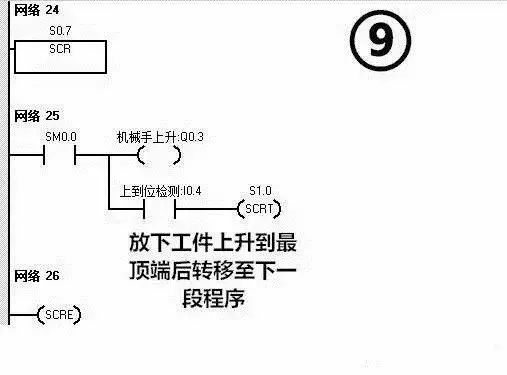
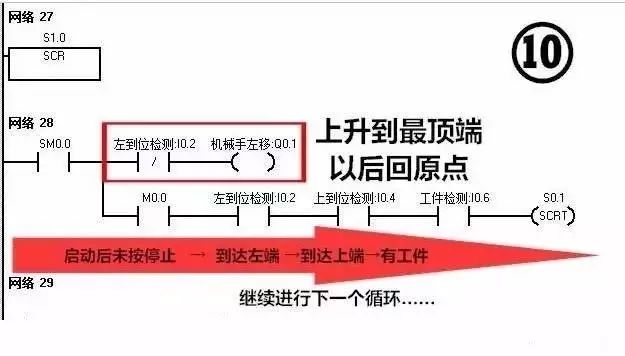
若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→放松→上升→左移→原点”的步骤工作。
动作图编程前理顺动作如何转移:
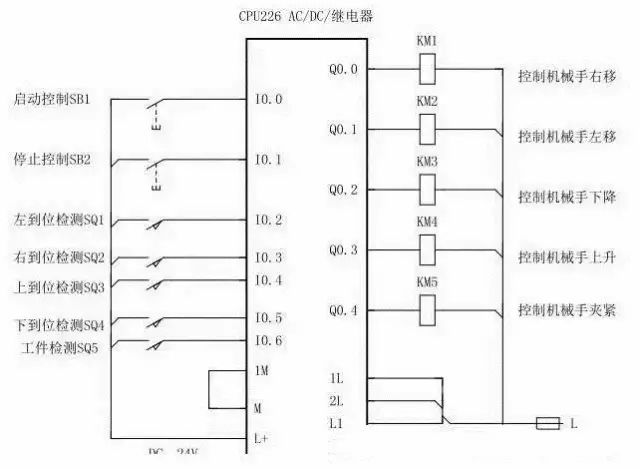
定义符号表:

硬件的接线图:
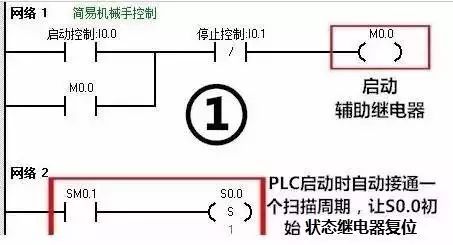
满足所有动作的程序如下:

一大堆梯形图看着真是眼花缭乱,不用担心我们一段一段分析分析这个机械手是如何工作的!
其实这个图没有那么多的并行分支,所以转移起来逻辑非常简单!
审核编辑:汤梓红
-
如何利用PLC来实现简单的搬运动作?2022-11-02 1129
-
基于ST的MEMS传感器的个人电脑和媒体遥控器空中运动控制2018-10-25 1904
-
设备应用于智能遥控器中的设计与实现2018-12-04 2078
-
单片机实现网络遥控器的方法(遥控器+显示屏+语音控制)2019-08-26 2753
-
PDA上实现遥控器的集成2016-04-18 1319
-
如何通过亚马逊Alexa语音控制遥控器2019-08-31 6932
-
基于STM32的红外遥控器设计,实现红外遥控器的复制与红外信号的发送2021-11-25 2009
-
红外学习型遥控器方案说明2022-10-18 6772
-
通过遥控器打开/关闭LED2023-02-01 852
-
通过遥控器控制的新手音乐播放器2023-02-13 1179
-
无线遥控器如何对码?2023-04-15 17619
-
如何利用PLC实现简单的搬运动作2023-05-10 2045
-
找方案 | 基于Infineon SoC蓝牙CYW20835之智能遥控器方案2022-11-30 2871
-
PLC实例:顺序控制指令,实现搬运动作2023-06-26 5097
-
RF遥控器厂家:射频遥控器将成为未来的控制主流2024-12-31 2169
全部0条评论

快来发表一下你的评论吧 !
