

使用IC4070和IC4013构建的步进电机控制器电路
描述
步进电机是一种无刷直流电机,它将单个旋转分成相等的步数。这些类型的电机广泛用于机器人和其他精确运动起着至关重要作用的应用。本电路教程演示了使用 IC4070 和 IC 4013 构建和工作步进电机控制器。
步进电机控制器电路的工作原理:
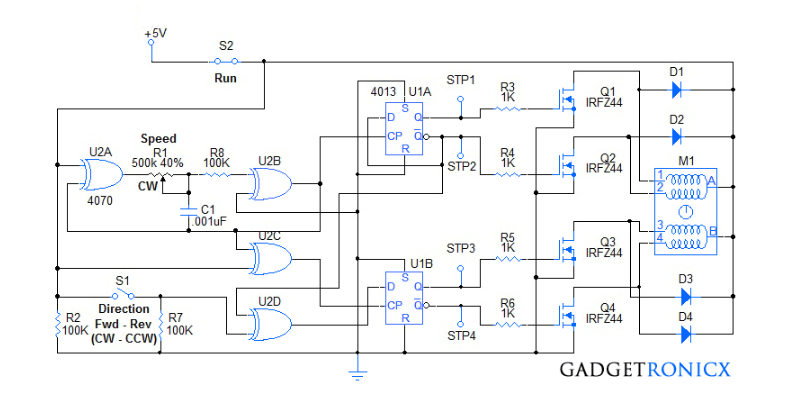
参考原理图,两个IC的U1A,B和U2A,B,C,D组成振荡器,以及驱动步进电机M1所需的正反正交信号。具体来说,作为逆变器接线的异或门U2A和作为缓冲器接线的U2B与R1、C1和R8形成振荡器电路。电阻R8用于保护U2B的输入免受过压和过电流的影响。C1和R1决定振荡器的频率。随着R1的减小(转CW),频率增加,步进速率也随之增加。如果需要较慢的步进速率,则可以根据需要增加C1的值。
U2B 连接到双触发器、U1A 时钟输入和U2C。U2C作为逆变器接线,为U1B提供反转时钟。U1A的Qnot输出连接到U1A的数据输入。因此,当U1A看到时钟的每个上升沿时,U1A的Q和Qnot的输出状态被切换(反转)。
开关S1,连接到R7和异或门U2D的输入。当按下S1时,U2D作为逆变器工作。当 S1 打开时,U2D 用作缓冲区。U1A 的 Qnot 输出连接到U2D的另一个输入。U2D的输出连接到U1B的数据输入。由于U1B的时钟输入是对U1A时钟输入的补充,因此U1B的输出将在U2A,B,C时钟的相反边缘更新。由于U2D反转或只是缓冲U1A的Qnot输出。U1B的输出将领先或滞后 U1A 的输出 90 度,从而产生所需的正交输出。
电路的其余部分很简单。R3-6为驱动晶体管提供电流,Q1-4。它们显示为 IRFZ44、n 沟道MOSFET,但只要对所使用的步进电机具有足够的增益和电流额定值,则可以使用任何 n 沟道 MOSFET 或 BJT (NPN)晶体管。D1-4为驱动器提供反激保护,以释放步进电机线圈中的磁场能量。
注意:
开关 S2 是为电路供电的停止-运行开关。
按 S1 可反转步进电机的方向。
如果需要更高的电压(高于12V),可以插入7812稳压器为电路的U1A,B和U2A,B,C,D部分供电。
-
步进电机控制器电路 Stepper Motor Contro2010-02-05 3504
-
如何为步进电机选择合适的驱动器IC2018-12-20 2654
-
用于厚膜混合IC单极恒流斩波电路的步进电机控制评估板2020-08-28 4677
-
硬盘步进电机速度控制器2022-08-05 1218
-
基于TOSHIBA/东芝 TB67S128FTG 步进电机控制器IC,资料参数2023-05-18 3916
-
步进电机控制器怎么使用2021-07-19 7860
-
步进电机控制器的应用设置2023-03-26 2515
-
使用IC555和IC4013构建的分频器电路2023-07-02 3236
-
什么是步进电机控制器?步进电机控制器电路图2024-06-20 6075
-
步进电机控制器电路图 步进电机控制器的分类及其特点2024-06-24 7473
-
TMC5130A-TA电机控制器和驱动器IC2024-06-26 2330
-
探索步进电机驱动IC的创新融合2024-10-21 1541
-
ADI Trinamic TMC5240x步进电机控制器和驱动器IC2025-06-16 1617
-
DRV8825步进电机控制器IC:设计与应用详解2026-01-11 1815
-
TMC5041:高效双步进电机控制器与驱动器IC深度解析2026-07-09 125
全部0条评论

快来发表一下你的评论吧 !
