

基于IC555的直流电机速度控制电路
描述
使用PWM信号控制电机速度的技术非常普遍。该电路使用类似的PWM技术来控制电机速度,并使用IC 555产生PWM信号。对于那些不知道的人, PWM或脉冲宽度调制 ,是一种调制技术,其中输出脉冲的宽度随时间而变化。因此,这改变了波的占空比,进而修改了该PWM信号的开和关时间。让我们看看这个直流电机速度控制电路是如何工作的。
直流电机调速电路工作原理:
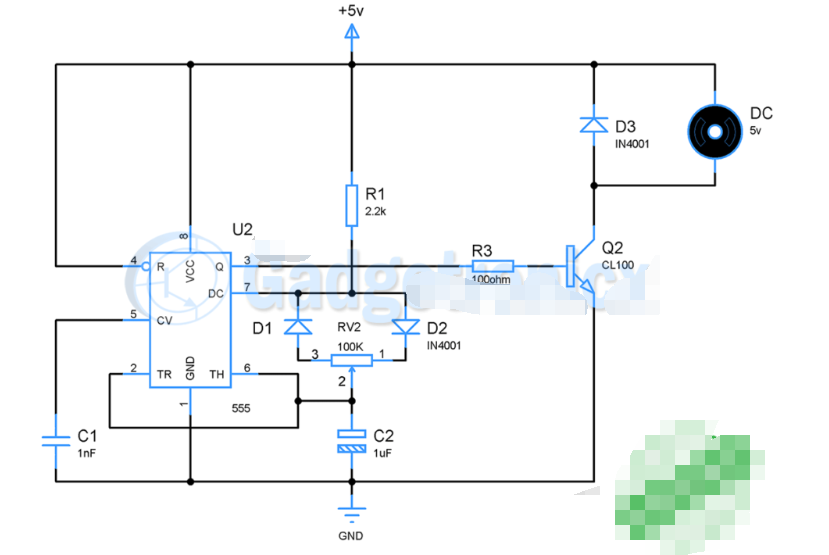
该电路的核心是由IC 555制成的非稳态多谐振荡器。该多谐振荡器产生一系列方波脉冲作为固定频率的输出。通常,非稳态多谐振荡器的输出频率取决于连接到它的电阻器和电容器。
555非稳态多谐振荡器输出占空比永远不会低于50%。为了在输出中实现PWM信号,我们应该能够根据需要修改占空比。这就是组件D2,D1,RV2出现的地方。
这种非稳态多谐振荡器的工作取决于引脚 7、引脚 6 和引脚 2 使用的电阻器和电容器。当电路上电时,电容C1通过电阻R1和RV2充电。但是,如果您注意到电路,来自R1的电流只能通过可变电阻的一个端子,因为D2是反向偏置的。
因此,D1允许电流流过它,RV2对电流表现出一定的阻力,这取决于电位器的位置。当电容器充电时,IC 555的输出将处于高电平状态。
一旦电容器充电至2/3 vcc,连接到引脚7的内部放电晶体管就会变为高电平。现在IC 555的输出将降至低电平。这迫使电容器通过RV2放电。但这次放电电流通过二极管D2,因为D1是反向偏置的。
RV2对放电电流的电阻将与对电容器充电电流的电阻不同。因此,电容器的放电时间将与充电时间不同。
这种变化的充电和放电时间将改变输出脉冲的宽度。这导致输出中出现PWM输出信号。当RV2的设置方式对来自D1的充电电流表现出非常高的电阻时,输出脉冲将具有更长的导通时间。
另一方面,这将为通过D2流出的放电电流留下低电阻路径,因此电容器快速放电,使OFF时间更短。因此,我们将获得高占空比PWM脉冲。如果我们反转电阻,相对而言,低时间会更长,而高时间会短得多。这将使我们能够获得远低于50%的PWM信号。
计算:
我们可以执行一个简单的计算来更好地理解这一点。
充电时间或开启时间 = 0.693 ( R1 + RV1 ) C2
放电时间或关闭时间 = 0.693 x RV2 x C2
如果可变电阻设置为在端子10和1之间显示2k电阻。那么这将是RV1对充电路径的电阻。此时,RV2中的端子3和2将对放电路径表现出90k电阻。替换上述公式中的值
导通时间 = 0.693 ( 2.2k + 10k ) 1uF
= 8.5 毫秒
关闭时间 = 0.693 x 90k x 1uF
= 62.37 毫秒
T = 导通时间 + 关断时间 = 8.5ms + 62.37ms = 70.87ms
占空比 = 8.5ms / 70.87ms = 12%
现在,如果我们更改RV1,使终端1和2中的电阻为90k,使终端2和3中的电阻为10k。我们的占空比变化很大
导通时间 = 0.693 ( 2.2k + 90k )1uF
= 63.9 毫秒
关闭时间 = 0.693 x 10k x 1uF
= 6.93毫秒
T = 63.9ms + 6.93ms = 70.83ms
占空比 = 90%
从上面的计算可以看出,提供具有不同电阻的不同充电和放电路径将使我们能够从IC 555产生PWM脉冲。修改RV1端子之间的电阻值将修改占空比。
电机驱动器:
该电路的下一阶段是相当的。IC 555的输出非常低,无法驱动消耗500mA的电机。因此,这里使用晶体管作为开关。PWM信号将驱动晶体管Q1的基极。这根据来自 555 IC 输出的输入信号驱动电机。当PWM信号的占空比很高时,电机的速度会很高,反之亦然。二极管D3用于在电机关闭时阻止电机的反向电流。
-
直流电机控制电路的工作原理2023-12-20 4060
-
有刷直流电机的工作原理及控制电路2023-03-30 1836
-
直流电机控制电路的工作原理和接线方法2023-03-27 11454
-
如何使用红外遥控器和555定时器控制直流电机的速度2022-11-30 2668
-
使用555 IC的PWM控制直流电机的速度2022-07-06 2314
-
如何使用PWM和555定时器IC电路来控制直流电机的速度2022-07-01 2580
-
直流电机驱动控制电路设计2022-06-21 3091
-
直流电机的正反转控制电路2019-10-01 19291
-
直流电机速度方向控制电路图2009-04-03 1696
-
精密直流电机速度控制电路2009-02-17 1193
-
直流电机控制电路2009-02-09 2680
-
直流电机正反转控制电路2008-10-17 6640
-
555直流电机调速控制电路2007-06-20 6566
全部0条评论

快来发表一下你的评论吧 !
