

利用微针机器人实现结肠给药的快速自定位和抗蠕动粘附
机器人
描述
含有微针的微型机器人具有经粘膜给药和可控药物释放的能力,为胃肠道给药提供了一种很有前途的途径。然而,目前仍存在许多挑战,如复杂的控制模式、缺乏运动和粘附行为的理论、蠕动和液体流动导致的失败以及肠梗阻的风险。在此,厦门大学任磊教授/王苗助理教授和厦门大学附属中山医院蔡顺天副主任医师设计了一种无栓微针机器人,用于特定的结肠给药,可以免除控制系统,实现快速自我定向和粘附粘膜,对抗生理蠕动,并降低梗阻风险。此外,微针和机器人之间的可分离层可以在6 min的时间内降解,这确保了在流体流动引起的20 mN的小排泄力下安全排出。体内实验也证明了该机器人的有效性和可行性。这些机器人可以作为一个通用的平台来治疗慢性炎症和结肠癌等疾病,以减少侵入性手术干预和患者的痛苦。
含微针的机器人设计
该研究构建了一个毫秒的自导向微针,其中包含机器人,用于结肠给药。含微针的机器人的应用机理如图1所示。将含有微针的机器人以随机的角度放入结肠,由于机器人的重心较低可以快速自我定向垂直于粘膜。微针阵列在机器人重力和结肠蠕动力的合力作用下逐渐穿透粘膜。随着可分离层逐渐被结肠液降解,机器人从嵌入粘膜的微针阵列中分离出来,并从结肠排出。插入的微针被保留在粘膜中,以便在负载药物缓慢溶解时释放该药物。
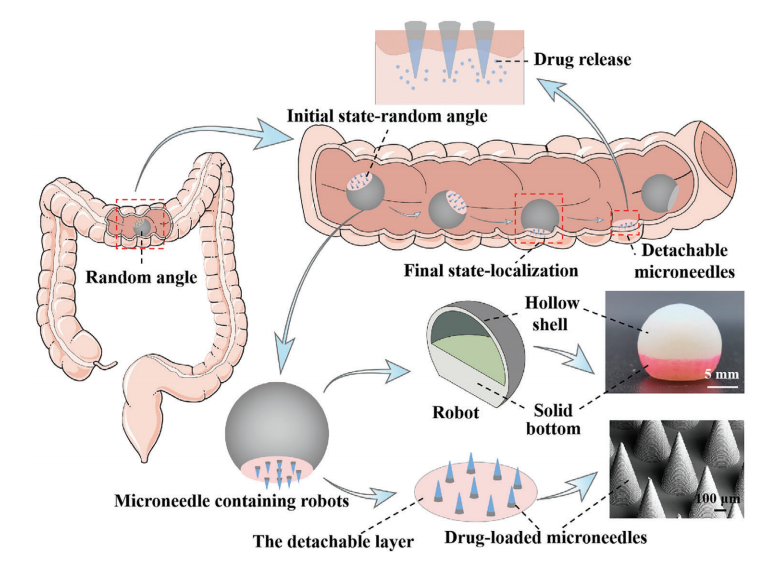
图1 结肠给药用快速自定向微针机器人的设计与机理
机器人的参数优化
通过优化含微针的机器人形状和厚度,以实现快速的自我定位和抵抗外力的能力。为了研究形状对取向时间和稳定性的影响,该研究设计了半球、球形和椭球形三种形状(图2A)。由于机器人的初始角度影响它们的自我定位时间,因此分别以90°和180°的初始角度研究了这三种形状的机器人(图2B),这些自我定位时间如图2B(IV)所示,结果表明,在初始角度为90°和180°时,半球形状的定向时间短于球形和椭球形形状。在运动条件下,半球形状的自我定位在几秒钟内就发生了(图2C)。
通过设计分别为2 mm、3 mm和4 mm不同固体高度的机器人来研究机器人的质量分布对取向时间的影响(图2A(III-V))。当固体高度分别为3 mm和4 mm时,自取向概率高达95%,且自取向时间略有差异(图2D)。如图2E所示,优化后的包含随机初始角度的微针机器人自定向时间在0.6 s内被观察到。
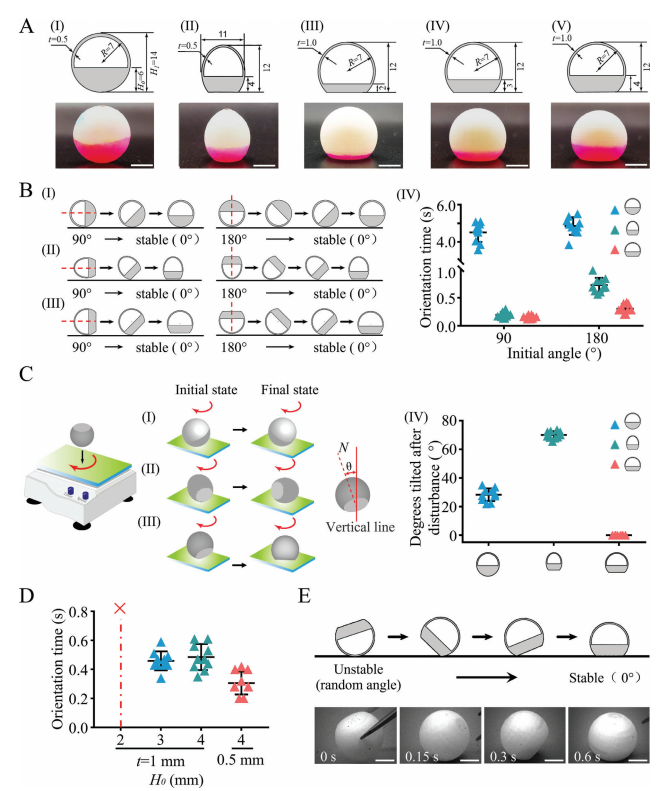
图2 机器人的参数优化
自定向特性
由于结肠呈现充满黏液的弹性表面,因此进一步研究了微型机器人在琼脂糖凝胶(图3A(I-II))和粘液(图3B(I-II))的人工平台上的自我定向特性。如图3A(III)所示,随着弹性模量的增加,取向时间有所延长。粘度为100 mPa·s的机器人不能在黏液表面实现自化,而在粘度为1.0 mPa·s时,定向时间最小。随着斜率的增加,机器人的自定向时间减少,含微针机器人的最终状态是微针尖端面对粘膜(图3C(I-III))。
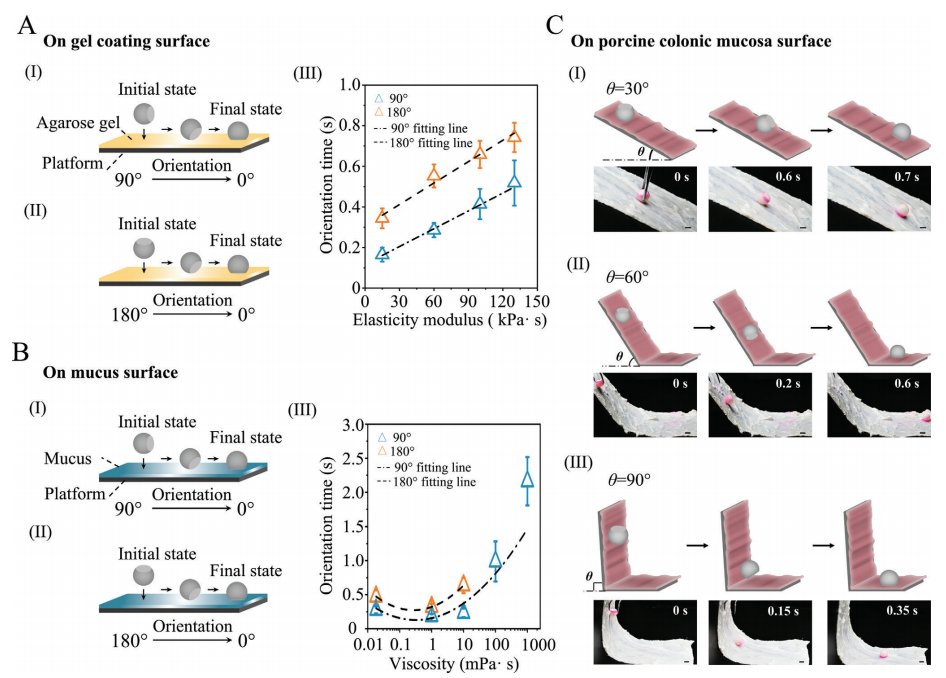
图3 机器人在不同表面上的自定向性能
可拆卸层的组装和微针阵列的参数优化
如图4A所示,带尖的微针阵列通过聚乙烯醇/聚乙烯吡咯烷酮(PVA/PVP)可拆卸层整齐地附着在机器人上,微针表面没有明显气泡。将含有微针的机器人浸泡在PBS缓冲液中,并以100 rpm的速度在摇床上摇晃(图4B)。3 min后的可脱离层明显比初始时间更薄。
机器人周围的可拆卸层约6min内完全降解,机器人最终与微针分离。因此,PVA/PVP作为可分离层,可以实现含微针机器人的快速分离。设计的几种可降解聚合物的药物释放时间从10 min到30天不等(图4C)。微针阵列完全穿透粘膜的穿透力测量出来为每根微针0.058 N(图4D)。从H&E染色的组织图像可以观察到CS微针成功穿透粘膜(图4E)。用荧光染料Cyanine5.5(Cy5.5)的粘膜共聚焦图像显示,微针的穿透深度可达到≈240 μm(图4F)。
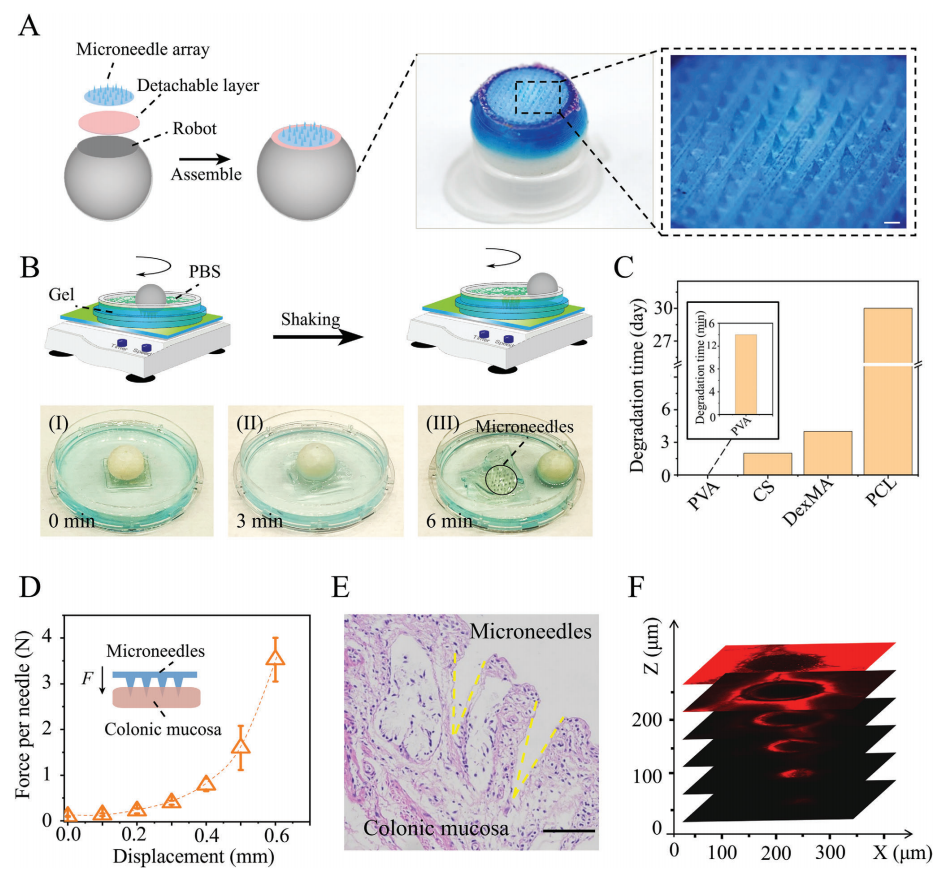
图4 可拆卸微针机器人的设计与优化
抵抗结肠蠕动
该研究开发了一个模型来合理评估含有微针的机器人在不脱离粘膜的情况下对结肠蠕动的阻力(图5A)。蠕动推动了包含机器人的微针向前移动,机器人与结肠壁之间的摩擦和粘附抵抗了机器人的运动(图5B)。图5C(I-II)显示,当抗拉强度达到1.75 N时,包含机器人的微针就可以直接移动。结果表明,含有微针的机器人插入粘膜后能抵抗结肠蠕动。
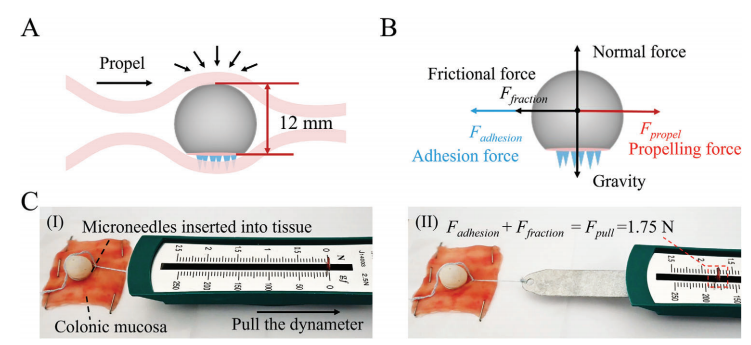
图5 含微针机器人抵抗结肠蠕动的理论模型
脱离后机器人的排放
由于人类结肠的解剖结构起皱,通过使用一个真人大小的软胶模型复制了结肠的解剖结构(图6A)。如图6B所示,当流速分别为15 m/ms、75 m/ms和135 m/ms时,所有机器人都被卡在液体入口。当流量达到210 m/ms时,机器人由流体驱动,并随流量移动到液体出口。通过有限元分析,量化了机器人在不同流量下施加的推进力,评估了流动高度为4 mm时的应力场(图6C)。通过模拟210 m/ms的流速,得到了机器人周围的流量(图6D)和由此得到的表面应力分布(图6E),数值结果表明,表面应力产生的推进力Fpropel随流量的增加而增加(图6F)。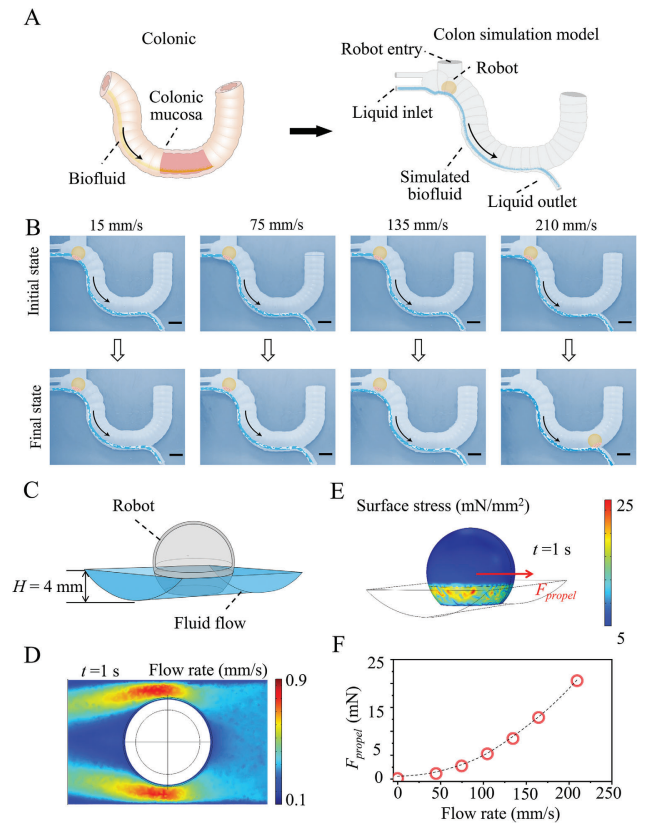
图6 含微针机器人的体外停留实验与模拟
体内实验
通过结肠镜检查将含有微针的机器人注入斑马猪的结肠(图7A),以评估其在体内的特性。如图7B所示,将含微针的机器人以90°的初始角度放入结肠,在5 s内实现了自我定位,由于重力和结肠蠕动力,将微针插入粘膜。当结肠蠕动分别发生在30 s和57 s时,含有微针的机器人可以牢固地锚定在粘膜内。
随着含有机器人的微针的可分离层在结肠汁中逐渐降解,在80 s内观察到机器人与微针阵列的分离。然后微针阵列留在粘膜中并缓慢降解,而机器人可在1 h内从体内排出,避免了结肠梗阻。这些结果表明,滚杯式机器人可以实现结肠内微针的自定向插入和保留,机器人可以快速分离和排出。此外,机器人从体内的快速分离和排出验证了机器人的高安全性。
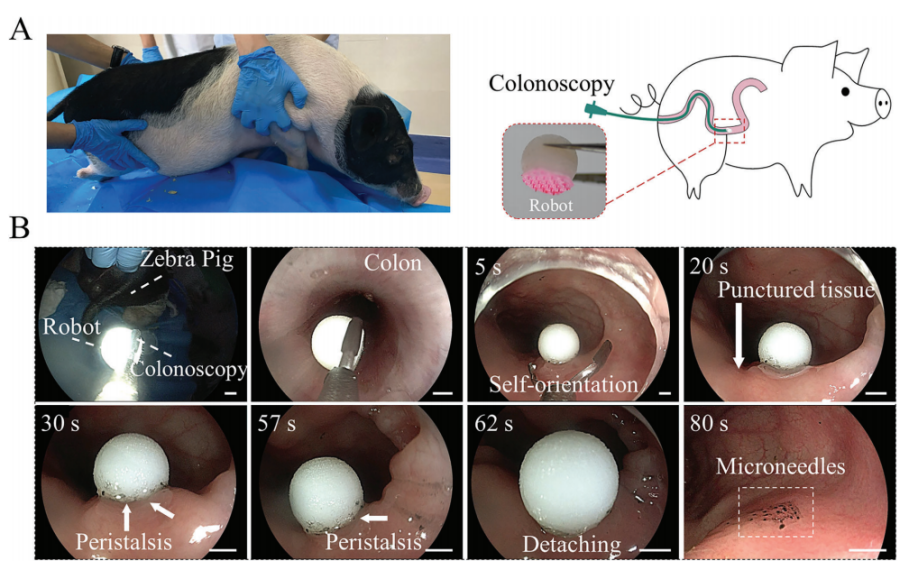
图7 斑马猪含微针机器人的体内评价
综上所述,该研究研制了一种含结肠给药的微针机器人,该机器人可以在不需要外部触发器的情况下自我导向黏膜。这个包含微针的机器人由一个具有低质心的机器人、一个可拆卸的层和一个微针阵列组成。这三个部分进行了优化,以实现快速自定向和抵抗外力。经过优化后的机器人,每根微针的穿透力为0.058 N,使它们能够完全插入到组织中。机器人可以在阻力的结肠蠕动下有效保留,但脱离后机器人无法抵抗结肠排出。在体内实验已经证明了包含微针的机器人的有效性,包括自定向的微针插入和驱逐机器人。该机器人结构简单,不需要外部控制,降低了结肠梗阻的风险,并潜在地抵抗结肠蠕动,使其有别于其他系统。
审核编辑:刘清
- 相关推荐
- 热点推荐
- 机器人
-
智能高尔夫机器人2013-10-27 2
-
模仿蚯蚓开发软体机器人2015-01-19 13318
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
【Aworks申请】家庭服务机器人2015-07-19 2117
-
机器人想要实现智能移动,必须具备超强的自主定位导航能力2018-01-03 4146
-
SLAM不等于机器人自主定位导航2018-08-24 7218
-
服务机器人是如何实现自主定位导航的?2018-10-10 3333
-
如何保存机器人建图,用于后续定位导航2019-01-28 2340
-
LabVIEW 的Tripod 机器人视觉处理和定位研究2019-06-01 2973
-
如何对ROS机器人的定位导航进行仿真2021-12-23 1818
-
一种鲁棒高效的足球机器人自定位方法2009-12-19 901
-
信息融合的移动机器人自定位2016-09-18 693
-
一种结合壁虎刚毛粘附材料和尺蠖运动形式的仿生粘附式尺蠖机器人2018-01-29 1294
-
微针机器人实现结肠给药的快速自定位和抗蠕动粘附2023-07-24 3228
-
利用肠蠕动驱动的微针机器人实现生物药物的无痛口服递送2024-01-12 2146
全部0条评论

快来发表一下你的评论吧 !
