

3D激光SLAM,为什么要选LeGo-LOAM?
描述
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有举足轻重的地位。下面的表格是近年来LOAM系列算法的汇总。
| 算法名称 | 发表名称 | 作者 | 备注 |
|---|---|---|---|
| LOAM | 2014 | Ji Zhang | 基于激光雷达而搭建的在ROS平台下的SLAM系统 |
| A-LOAM | 实现了LOAM开源代码,并做了部分优化 | ||
| LeGO-LOAM | 2018 | Tixiao Shan | 与IMU是松耦合 |
| LlOM | 2019 | Haoyang Ye | 与IMU是紧耦合 |
| LIO-SAM | 2020 | Tixiao Shan | LeGO-LOAM升级版,与IMU紧耦合 |
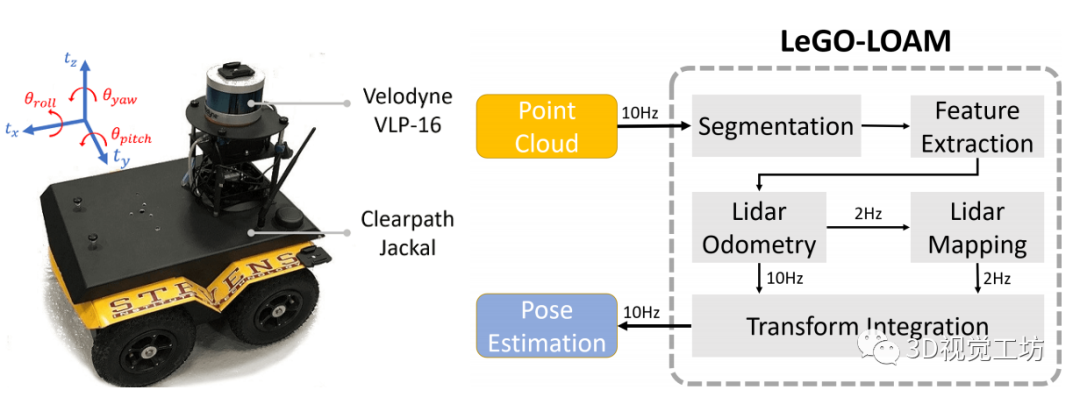
LeGo-Loam是基于ros系统框架的3D激光slam开源代码。代码简洁,其中大量计算都是手动推导出来,依赖库相对较少,主要依赖gtsam进行后端因子图优化。其中在前端里程计计算中,通过地面特征和线特征分开来计算机器人姿态,减少计算量,提高前端计算效率。其系统框架如下图:
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级,也加入了回环检测模块。
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级;也使用了Keyframe概念以及回环检测位姿图优化的方式对后端进行重构。
对于工业领域而言,LeGo-LOAM有非常广泛的应用,尤其是工业机器人领域,LeGo-LOAM一直都是应聘者必须掌握的框架。
对于学术研究而言,LeGo-LOAM是激光SLAM的经典框架,LeGo-LOAM源码简洁清晰,比LOAM算法的代码可读性要高很多。近几年各顶会上的很多SLAM算法设计思想都潜移默化地受LeGo-LOAM的影响,对其的改进思路相较于LOAM也比较多样化。
如何高效学习LeGo-LOAM?
学习SLAM主要需要攻克三大难关:
- 扎实的数学基础
- 对整个SLAM大框架及细节部分理解到一定深度
- 比较高度的编程能力
这三点都绝非易事,需要花很大的功夫,中间也有不少弯路要走。
对于初学者,推荐以下的学习路线:
- 先看一遍十四讲入个门,不用看的太深入,应为这会可能会有很多不明白的地方。
- 查阅相关的硕博论文、综述论文,看看前人的工作部分,再找经典的开源代码过一遍。
- 学习框架:LeGo-LOAM 、LOAM/A-LOAM、Lio-Sam、cartographer等。= 可以尝试做一些实际项目,边做边总结。
做好以上几点基本都差不多了,但是自己学习总是会遇到很多困难。为此,我们与高级科学家弘毅学者一起研发了《深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战》课程,一方面是带领大家入门基于LeGo-LOAM框架的3D激光SLAM技术,另一方面是带领大家掌握激光SLAM的学习方法。
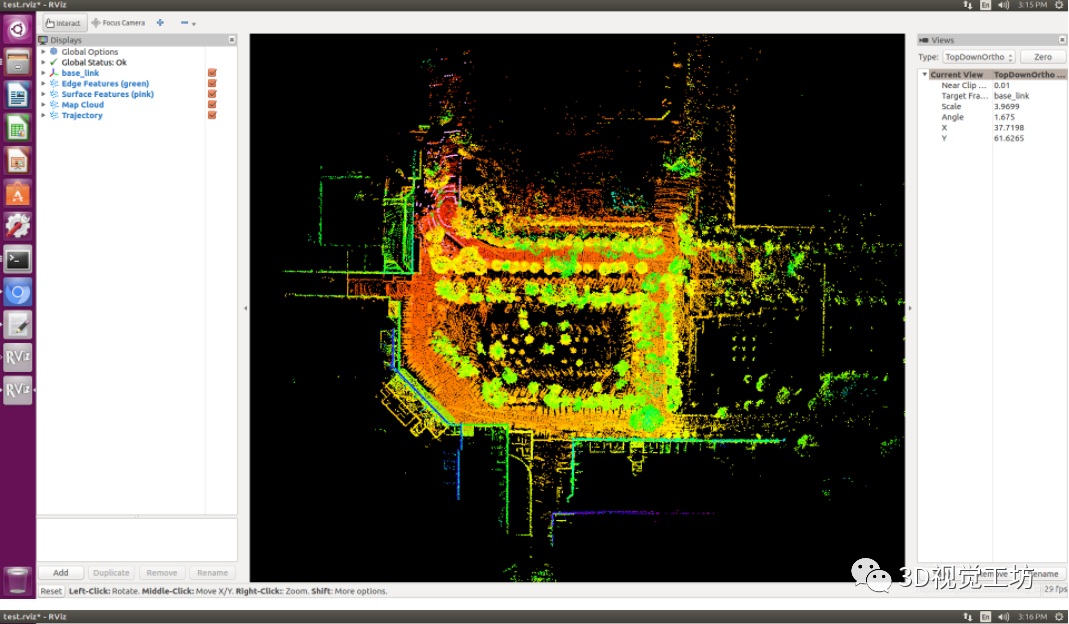
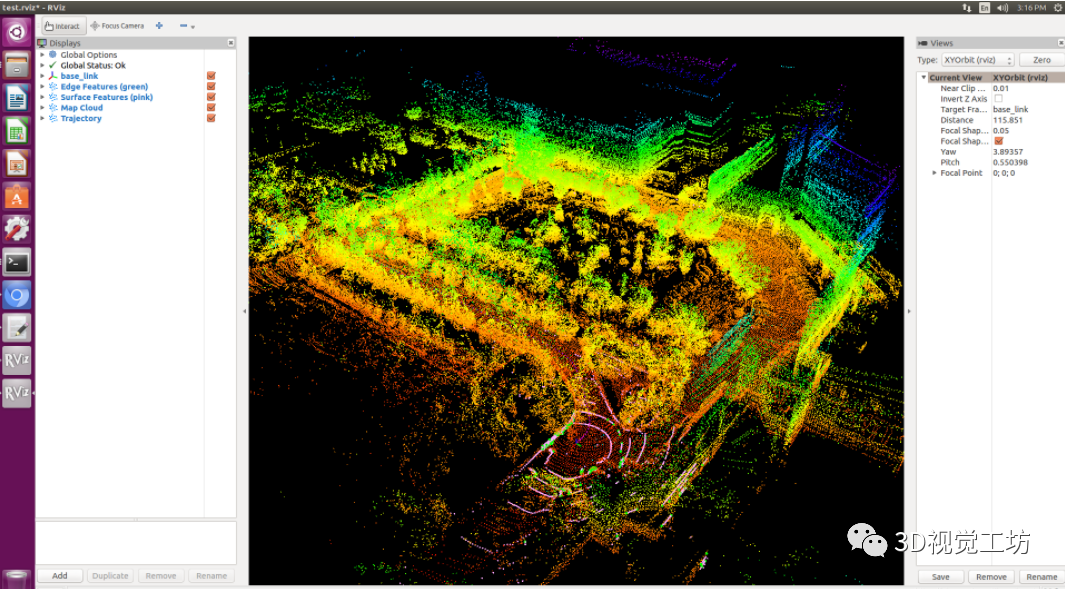
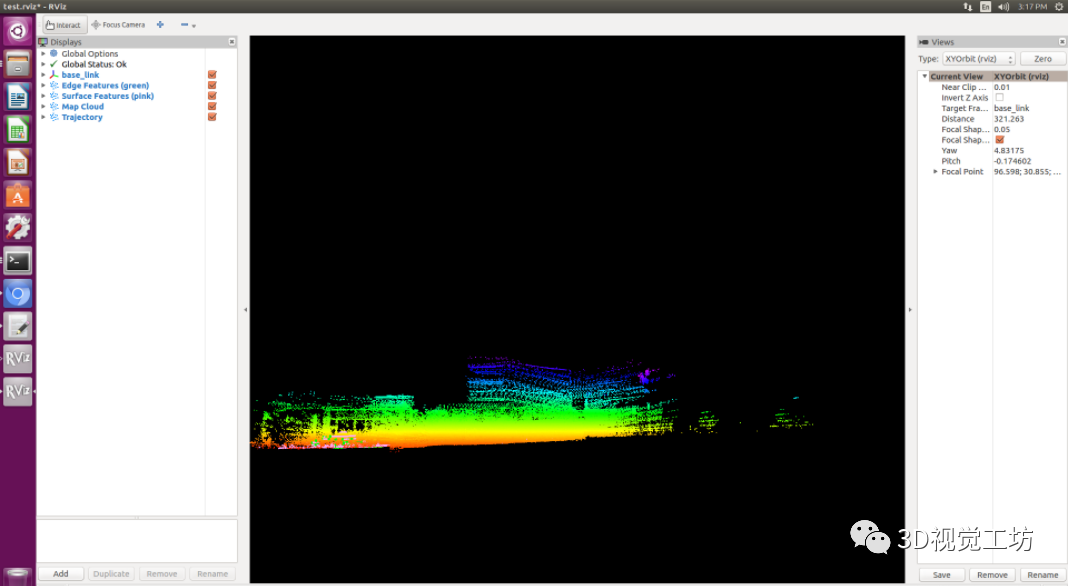
LeGO-LOAM运行效果展示:
-
基于深度学习的LiDAR SLAM框架(DeepPointMap)2023-12-29 2078
-
中强光智能3D激光SLAM无人叉车技术特点详解2023-11-10 1908
-
对于3D激光SLAM,LeGo-LOAM到底有多重要?2023-08-31 1724
-
不同3D激光SLAM方案对比分析2023-08-28 1606
-
基于LeGo-LOAM框架的3D激光SLAM技术2023-06-29 1575
-
3D激光SLAM是用LOAM还是LeGo-LOAM?2023-06-28 1831
-
聊聊3D激光SLAM开源算法-LeGo-LOAM2023-06-11 2707
-
基于LeGo-LOAM框架的激光SLAM技术解析2023-06-09 567
-
用于3D激光雷达SLAM回环检测的实时词袋模型BoW3D2023-01-11 3274
-
基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题讨论2022-10-27 2003
-
测试的SLAM方案2022-08-03 2101
-
3D激光雷达SLAM技术的应用趋势2022-03-21 6531
-
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-1282018-07-26 6090
全部0条评论

快来发表一下你的评论吧 !
