

双目相机标定的原理和方法
描述
大家好,我是小张Tt, 我最近学习了「3D视觉工坊」出品的「相机模型与标定系统课程」课程中有关双目视觉的知识,课程内容非常丰富,涵盖了双目相机标定基础及标定实战、双目相机立体匹配基础以及双目深度估计实战。通过学习这门课程,我对双目相机的标定和立体匹配有了更深入的理解,同时也掌握了一些实战技巧。
首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。在这门课程中,我学习了双目相机标定的原理和方法。标定是确定相机内外参数的过程,而双目相机标定则需要考虑两个相机之间的相对位置和姿态关系。课程详细介绍了使用棋盘格图案进行标定的方法,并提供了实战案例,让我更好地理解标定过程的具体步骤。
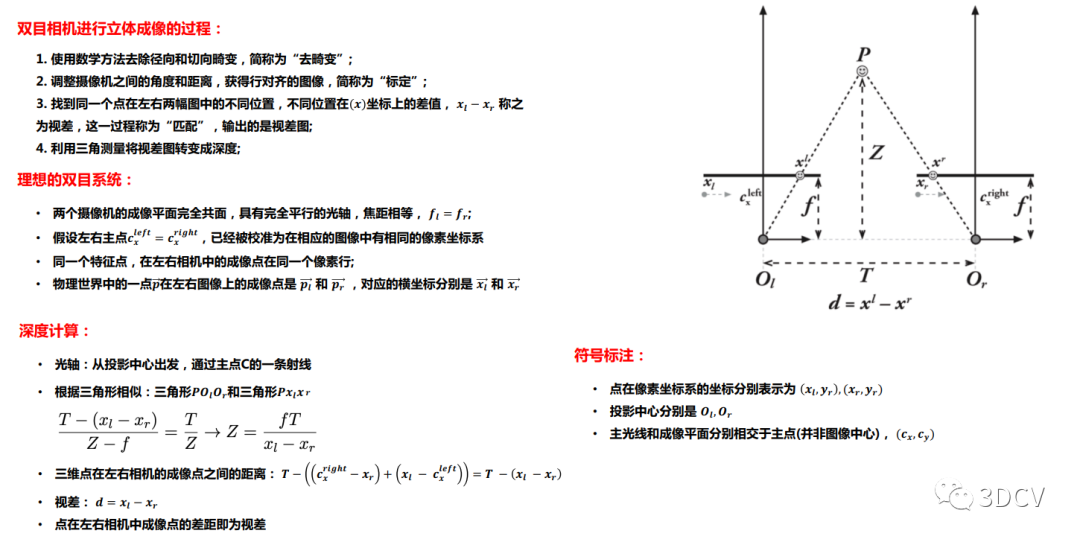
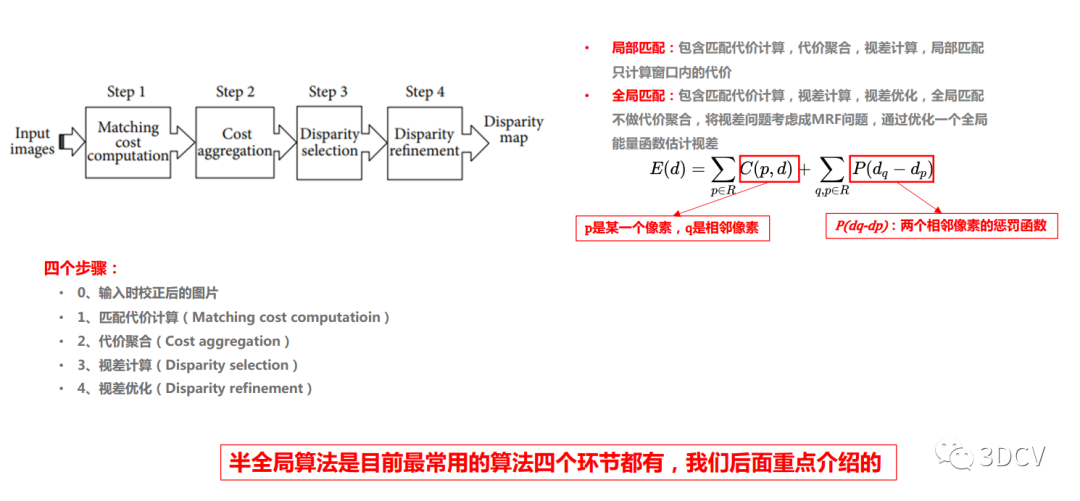
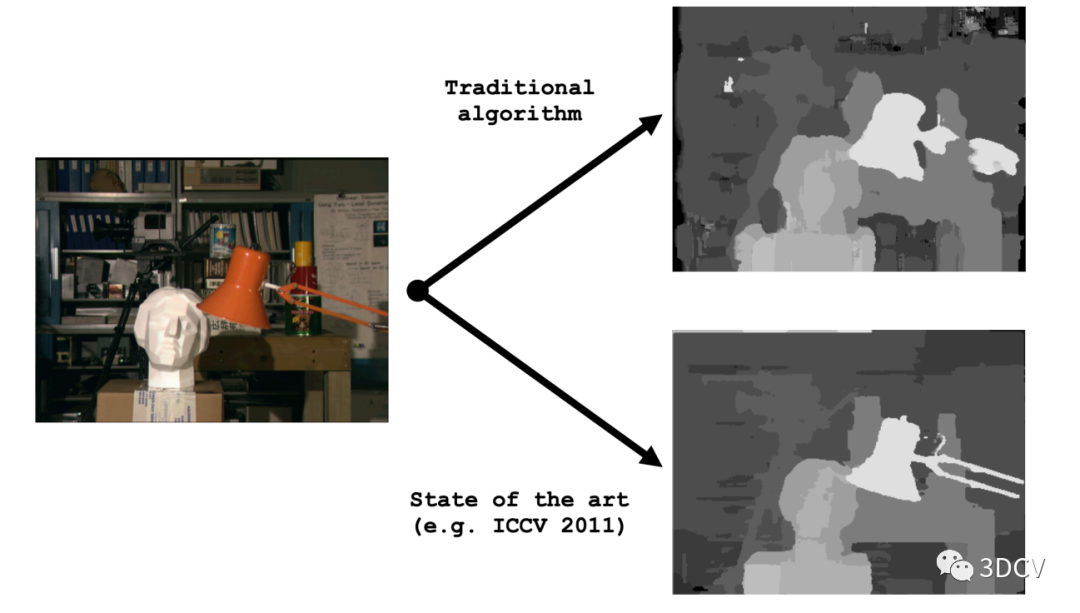
其次,课程深入讲解了双目相机立体匹配的基础原理。立体匹配是指通过将左右两个相机的图像进行像素级别的匹配,从而计算出场景中的深度信息。在这门课程中,我学习了常见的SGBM立体匹配算法,它是半全局立体匹配算法。课程通过理论讲解和实例演示,让我对这些算法有了更深入的理解。
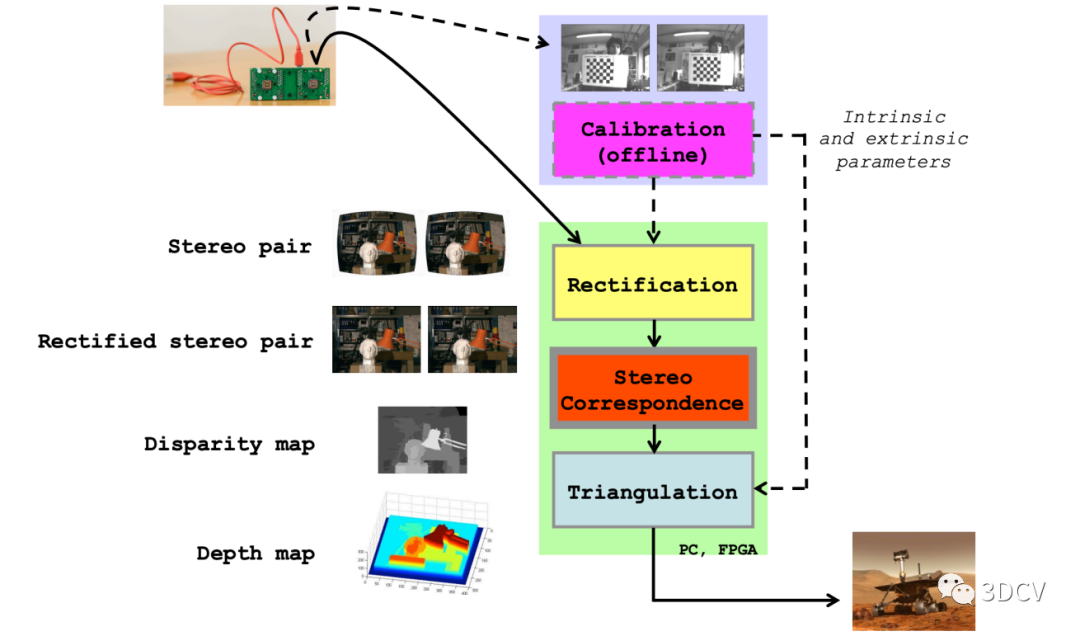
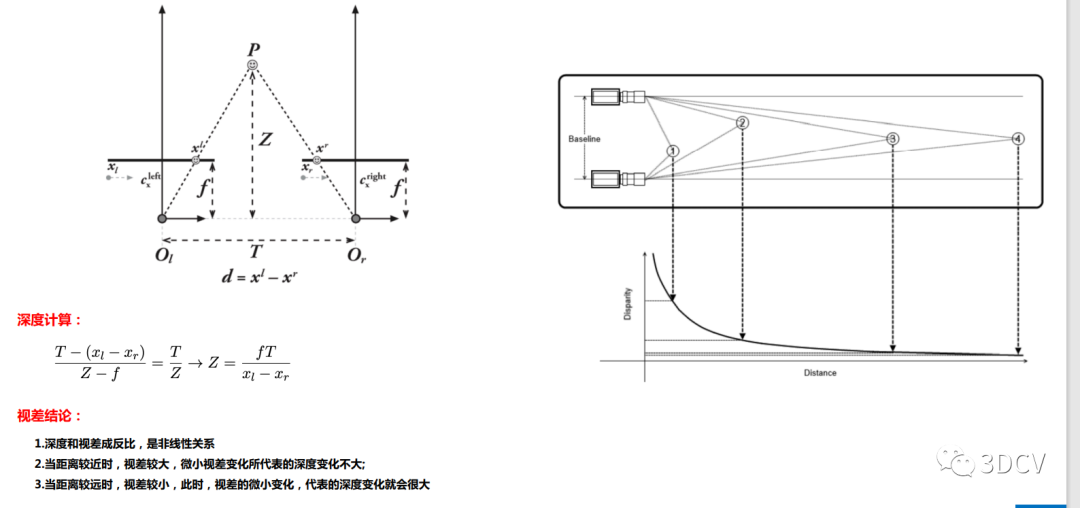
最后,课程提供了双目深度估计的实战案例。通过学习这个案例,我掌握了如何使用双目相机进行深度估计,并将其应用于实际场景中。课程给出了实战中可能遇到的问题和解决方法,帮助我更好地应对实际挑战。
通过学习课程,我对双目相机的标定和立体匹配有了更深入的了解。这门课程内容丰富、实用性强,通过理论讲解和实例演示,让我从多个角度全面理解了双目相机的原理和应用。课程中对于一些数学公式和推导过程,给出了清晰的解释和图示,让同学们可以更容易地理解和掌握。而且对于一些关键概念和步骤,也给出了重点提示和总结。我相信这门课程对于想要入门学习双目相机技术和应用的人来说,是一份非常宝贵的学习资源。
编辑:黄飞
- 相关推荐
- 热点推荐
- 相机
-
工业相机单目和双目的区别2024-03-26 5005
-
常用视觉的三种相机标定总结2023-10-09 4705
-
什么是相机标定 常用相机标定的方法2023-08-04 4486
-
张正友标定方法是手眼标定吗 如何分析相机标定参数的好坏2023-08-03 2227
-
手眼标定的详细推导过程2023-07-11 4453
-
相机之间为什么要进行双目标定呢?2022-12-28 4053
-
基于双目视觉的点集配准2022-10-10 2755
-
【龙哥视觉】LabVIEW双目视觉标定板标定测距2021-09-27 20681
-
双目标定是什么?为什么要进行双目标定?2021-07-04 13057
-
基于散焦模糊量估计的相机加权标定方法2021-04-21 966
-
LabVIEW双目视觉 【转载】2020-03-02 9305
-
基于HALCON的双目是相机立体视觉系统标定2017-11-06 1882
-
摄相机标定介绍2016-09-22 924
-
基于小波变换的双目系统标定研究与实现2010-01-07 786
全部0条评论

快来发表一下你的评论吧 !
