

从电流超前剖析PFC控制设计
控制/MCU
描述
拒绝“无用功”,则是提高电能质量的关键,功率因数(PF, Power Factor)是评估电能质量的重要指标。
功率因数校正(PFC, Power Factor Correction)是电力电子技术中最为广泛而常见的应用,小到笔记本电源,大到机场桥挂电源等等。从大三实习至今,本工作室一共设计过3个PFC,功率因数从0.99提高到0.999,再到0.9999,虽然是仿真,但每一次都有新的理解和发现,即使是这么常见的电路。
有源PFC控制策略的基本思路是:以交流电压的波形作为电流指令的参考,通俗的讲,让电流去跟随(follow)电压。
不清楚是否有人与我有相同的困惑,既然是跟随,就意味着通常只可能滞后,不可能超前,否则就有预知未来的能力了。
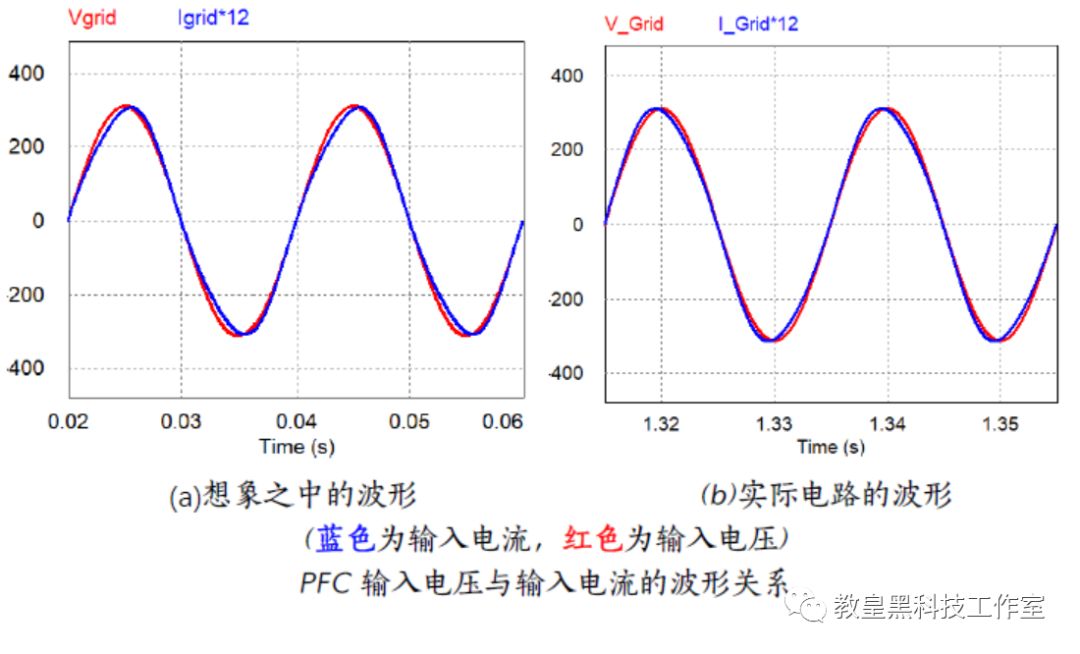
原本脑补的波形是电流滞后于电压的,如上图(a)所示。但是,PFC电路仿佛真的有“预知未来”的能力,无论是仿真,还是实测波形,都只能观察到输入电流超前于输入电压的情况,如上图(b)所示,而在轻载、输入电压变高的条件下,还有在调试过程中控制参数不合适的时候,该现象会更为明显。
为了探究输入电流超前于输入电压的真正原因,特别推出一款黑科技干货,从控制框图入手,对有源PFC电路进行了深度地解剖。
正文共包括3个部分,前两个部分分别阐述了电流环、电压环如何引入了电流超前的相位,第3部分总结了PFC的设计要点以及应对PFC电流畸变的策略,并给出了一种 “相位补偿” 的思路和控制框图。
本文中讨论的PFC, 主电路拓扑为Boost型,控制方式为CCM平均电流模式,电压外环,电流内环,并且采用流行的A*B/C²前馈策略 ,具体细节在本文中不再供述,请自行查阅资料。典型电路如下图所示。
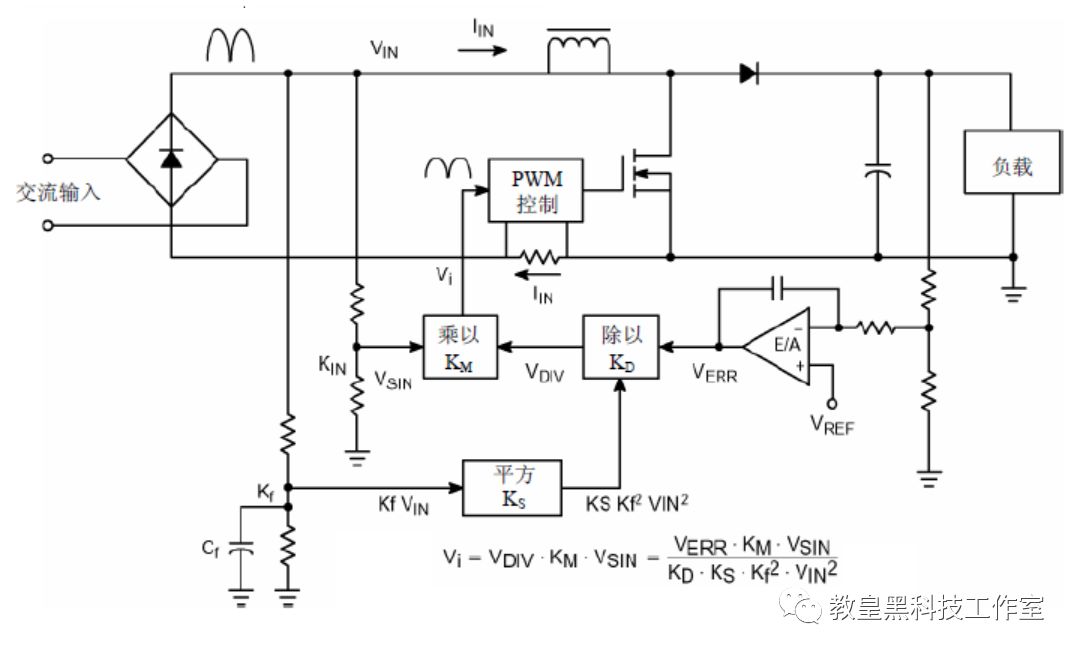
为简化分析过程,均忽略ESR对系统的影响,PWM环节增益为1。
PFC设计要点 & 减小电流畸变的策略
H2O了这么多,终于把PFC输入电流超前的原因说完了,大多数字符都是负责灌水和经验值+3。
(PS: 为了不显得那么Waterful,把前两部分做成了出门右转,但本部分提到的变量大多在前两部分中定义)
实际应用设计的时候哪能考虑这么多,所以最后一部分来一些干货。
还是先总结一下前面的内容。废话很多,但一共就说了两条。
①(输入电压50Hz波动 ⇒ 电流环 ⇒ 电流超前)
对于Boost电路,交流输入电压的正弦变化相当于电源扰动。闭环控制后,电流环对于该扰动的响应是具有超前相位,也就是输入导纳在工频段呈容性。
②(直流母线波动 ⇒ 电压环 ⇒ 电流给定 ⇒ 电流超前)
直流母线电压二倍工频波动,会进入电压环反馈,导致瞬时电流指令相位超前,并含有三次谐波分量
理论是指导实践的,从控制设计的角度,到底应如何减小PFC输入电流畸变?
1
中医活血化瘀
上有政策,下有对策。何谓对策?对症下药耳。通中医者,需识四气五味,药方讲究“君臣佐使”,就像自控系统,需协调各个频段的特性。处方①:提高电流环50Hz处增益
君药:尽可能提高带宽(保证稳定裕度的前提下)
臣药:PI调节器零点设置在截止频率附近
佐药(可选):提高开关频率,进一步提高带宽
使药(可选):增加积分环节个数,在截止频率前放置相应额外零点补回相位
这剂药针对的是病症①,根据第1部分的分析, Y1 ( s )是它的病根

Giv ( s )是由电路固有特性决定的我们无法改变,为了减小 Y1 ( s )的幅值,自然想到提高 TI ( s )在50Hz处的增益。
提高开关频率容易理解,不过开关频率更多是基于硬件层面的考虑,硬件设计完成后,开关频率一般可调范围不大。
增加积分环节的个数(也可称增加系统的型数,变为II型甚至III型调节器),须同时配置等数量的中频段零点,以保证相位裕度不变。不得不说,这是一味猛药,使用不佳将导致系统稳定性变差,使用得当将改善系统特性。模拟控制系统则需额外添加运放,增加控制成本,一般不采用此方案;在数字控制系统中,仅需增加额外的运算量。
处方②:提高电压环调节器100Hz处衰减
君药:带宽设置在5~10Hz
臣药:PI调节器零点设置在截止频率附近(可稍高于截止频率)
佐药(可选):在 [5 f~c ~ , 100Hz] 区间放置一个极点
使药(可选):再放置一个极点,或再降低带宽
这剂药针对的是病症②,根据第2部分的分析,电流指令畸变的原因可以等价为k值不足够小。

k正比于‖ Hcv ‖,ω=2πf 为一常量,其他系数在特定负载条件下为常量。为了减小 k ,只能减小‖ Hcv ‖,目标很明确了——减小它在100Hz处的幅值。另外,在100Hz处的相位角φ也会影响电流指令,使Arg( Hcv (j200π))接近 -90° 也会减小电流指令的超前相位。
相位裕度和100Hz衰减互相制约,需根据实际情况折衷考虑。对于带宽漂移的问题,需注意直流母线通常使用的电解电容,低温时电容值下降,会导致带宽升高。
既然电流是相位超前的,那么我们可以让电流指令滞后,来抵消系统本身产生的相位超前的效果。
故特别推出一剂独门偏方
独门偏方 ——“健胃消食片”
配料:一个截止频率合适的一阶低通滤波器
服用方法:在正弦电流指令之前串入
截止频率合适的标准为,使得低通滤波器产生的滞后相位与系统控制出的超前相位大致相同,通常可设置为电流环带宽频率的一半。
这剂偏方主要思路是补偿相移来提高PF值,但不能减小THD。顺便可以获得的一点好处是,滤除了输入电压采样信号中的高频分量。
2
外科手到病除
以上三剂药均为中药,重在通经舒脉,受制于系统特性,药效或许有限。若依然无法令客官满意,不妨试试聘请一位外科医生。外科医生的最高境界可谓手到病除,但首先还是要知道病痛所在。针对病症①的病根 Y1 ( s )

中医的做法是提高免疫力,外科医生的想法就比较直接了:
“可以直接去掉它的影响吗?”
认真地端详这个系统的构造过后,脑海中思索出一门新的“医术”,取名曰“相位补偿”。
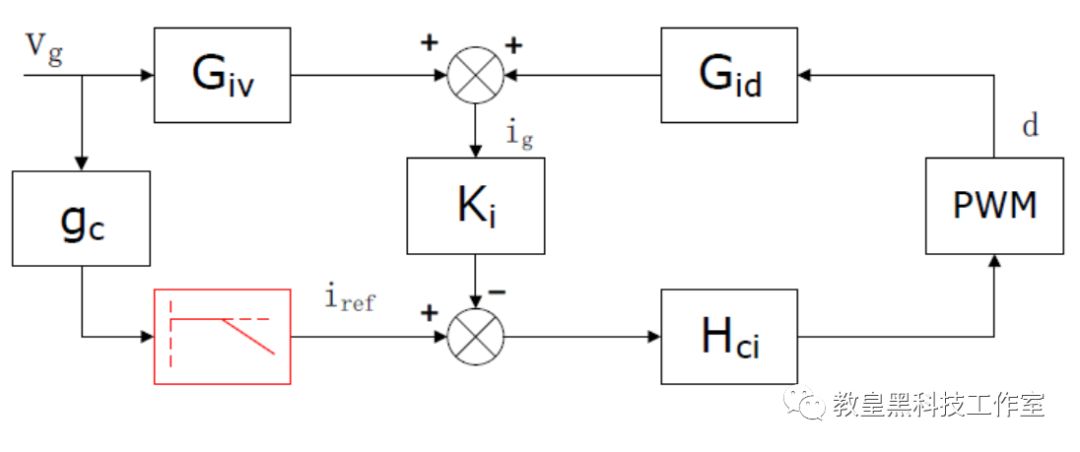
方案①:手术
上图黑色的部分是原本电流环的控制框图,我们希望去掉的影响是 Y1 ( s ),仔细观察整个系统中传递函数的表达式,主电路特性的两个传递函数 G iv (s) , G id (s) 是无法改变的,但它们也很特殊:


除了分子长得有点区别,只差一个系数 Vo 。而由于RC的时间常数远远大于工频周期,故在50Hz处可近似认为

接下来的事情就明了多了,手术刀已准备好,手术的内容就是上面框图红色的部分。 Yin ( s )的表达式变为
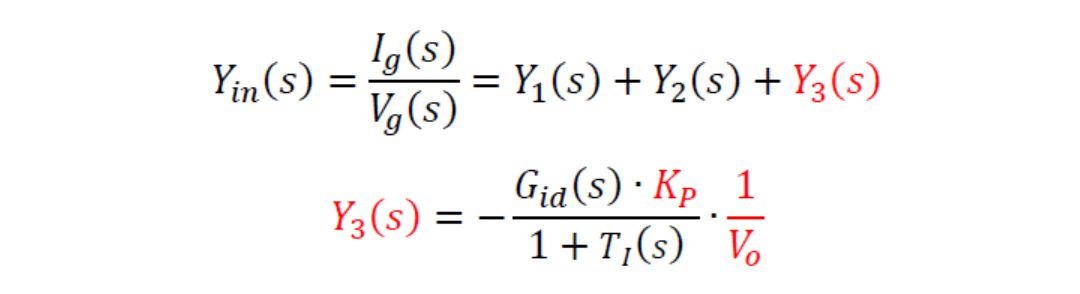
只要使

即可消除 Y1 ( s )对于电流环相位的影响。
若电压采样系数均为1, KP =1。若考虑母线电压采样系数为 Kv ,交流电压采样系数为 Kac ,则前馈系数应为:

在上述的控制方法中,建议使用母线电压平均值作除法器的除数。
使用数字控制系统的话,应采用定期更新 Kv /(Kac Vo_avg )值的方法,这样每次计算控制量的时候,仅需额外进行一次乘法和一次加法。
若母线电压不需要调节的话,可省略除法器,并修改KP为

关键的问题来了,这个手术真的有用嘛?我们来做几组对比仿真试试。
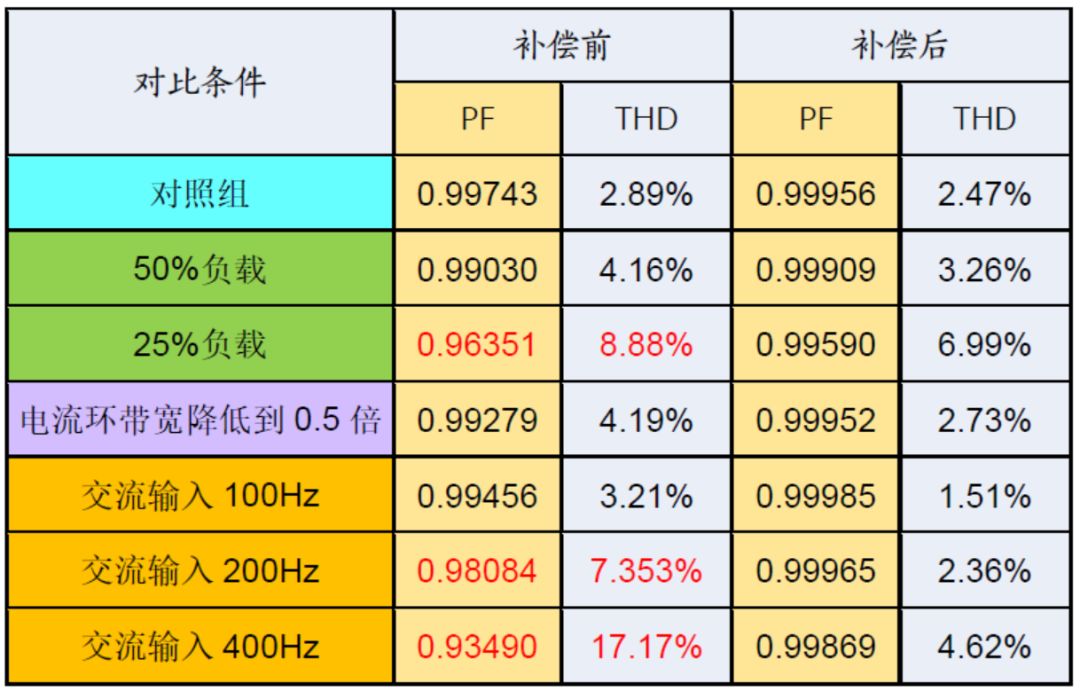
手术的效果是惊人的,和我们预想的一样,对PF值的改善相当好。
另外我们可以注意到,在进行相位补偿前,输入交流频率提高到200400Hz时,PF值和THD值变得非常差。经过第1部分的分析,这个结果是可以预见到的,具体原因也已详细说明。在Bode图中可以看到 *Yin~* ( s )的相位超前在这个区间内是越来越严重的。
可见该手术基本上治愈了病症①的影响,也提高了PFC电路适应特性,可以获得以下几方面的好处:
A. 适应轻载:负载较轻的时候也能达到PF>0.99的要求
B. 适应中频交流电输入:尤其是400Hz交流电,这是航空用电的频率。所以,需兼容中频交流输入的用电器应当总是采用相位补偿策略。
C.降低对带宽的灵敏度:我们在上表格中的对比数据中可以发现,电流环带宽降低后,在补偿前特性变差很多,但在补偿后,电流环带宽对系统特性几乎没有影响。我们不再迫切需要50Hz处增益,可以将电流环的带宽降低,以适应较差的电感直流偏置特性并保证系统的稳定性。也会让主电路设计变得更加从容,比如更方便的降低开关频率。
不过呢,这个手术刀切得有些深了,直接切开了胸腔,即使使用数字控制,也需要破坏原有的程序结构。如果使用模拟电路控制,需要添加一个额外的运放,并且也存在控制芯片不兼容的可能。
那重新选择一下手术刀的位置,不妨试试下面折衷的方案。
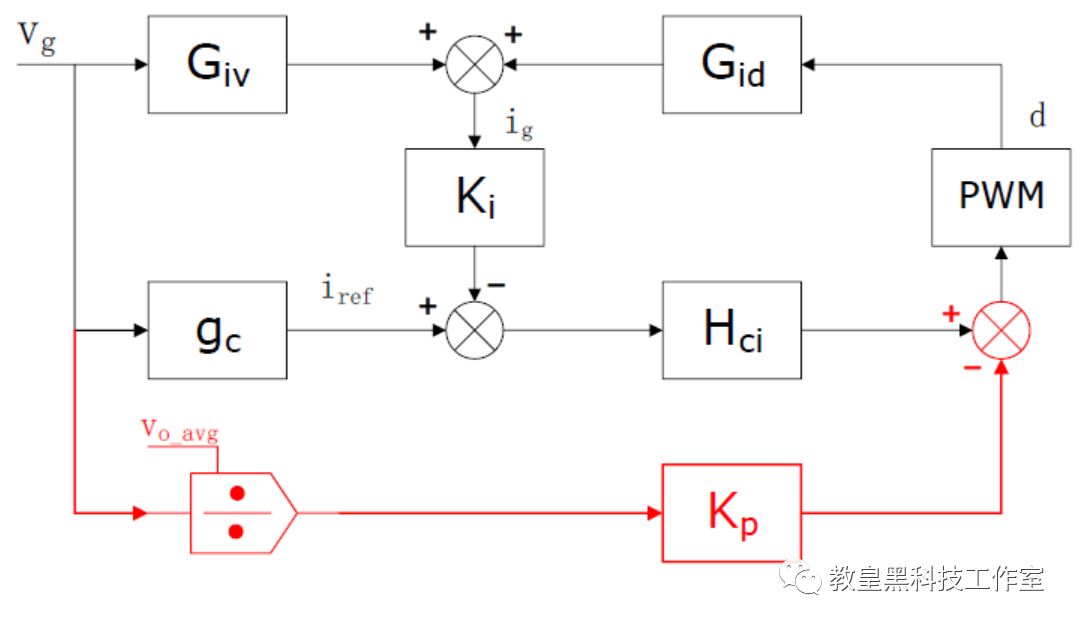
方案②:输液
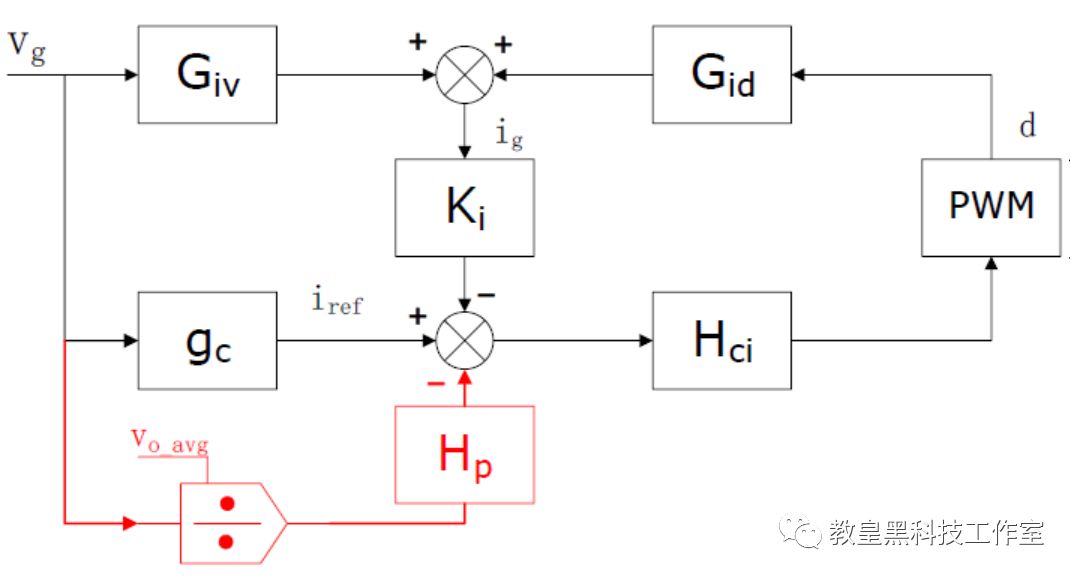
有些人说,输液其实也是一台小手术啦,不过它的学名叫“静脉穿刺”。创口很小,再由血液系统输送至全身,就像上图这个控制系统一样。
红色部分就是为了消除 Y1 ( s )影响而打的吊瓶,补偿量通过输液进到电流给定,再通过电流环“血液系统”抵消 Y1 ( s ),与方案①类似,只需设计合适的 HP ( s )使

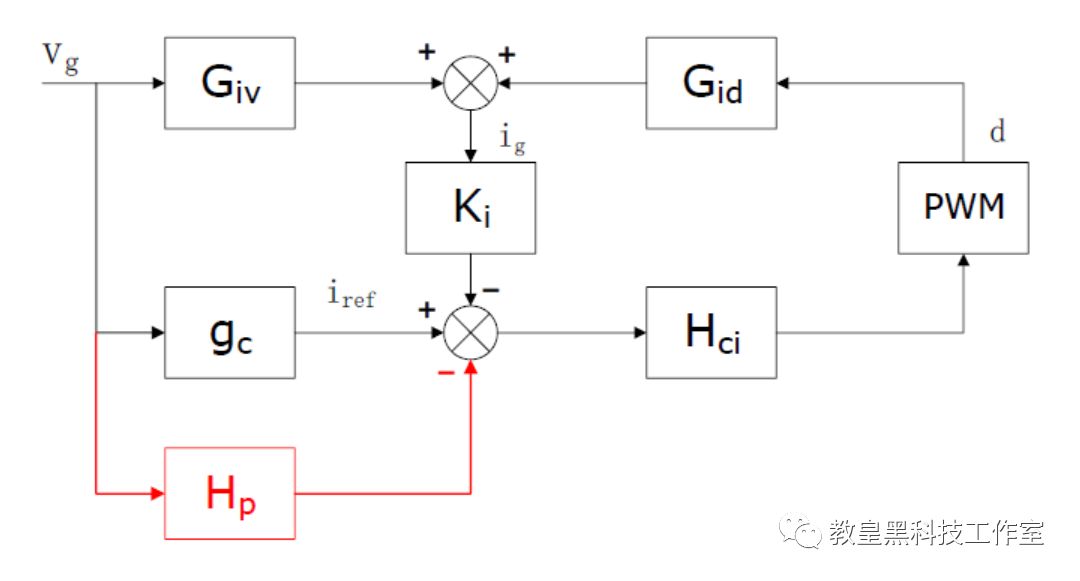
若不调节直流母线电压,可简化为下面的控制框图,更加适合模拟系统控制。
原理和做手术的方法是一样的,这里讨论一下优缺点。
优点:
保持了电流环结构的完整性,使用数字控制系统利于结构化程序设计;使用模拟控制系统可节省一个运放,仅需将前馈信号串联RC接入运放输入负端,并计算出对应RC的参数即可。
缺点:
相比方案①引入了额外的 Hci ( s ),也就是说, HP ( s )还需补偿电流环调节器的影响,当 Hci ( s )变动的时候, HP ( s )也需要重新匹配参数。另外,数字控制额外的运算量要远远多于方案①。
数字控制系统两种方案均可采用。方案①的计算量小,简单明了,可避免不必要的计算误差,更适合灵活的数字控制系统,不过需精心维护程序结构。
模拟控制系统应根据实际情况选择方案,并且视直流母线电压为常量。在直流母线可调节的应用中谨慎使用或不使用。
另外,相位补偿特别适用于400Hz中频电源,可以在较低开关频率的条件下也能达到系统要求。
-
深入剖析Würth Elektronik WE - PFC PFC扼流圈:特性、注意事项与应用考量2026-07-24 47
-
深度剖析NCP1616:高效PFC控制器的卓越之选2026-06-01 294
-
电压电流的超前与滞后讲解2023-03-09 36442
-
电流电压超前滞后动图分享2022-10-24 2641
-
电容的电流为什么会超前于电压2021-10-09 4801
-
怎么在仿真中设置电流控制角(超前角)呢2021-09-28 1549
-
电压电流的超前与滞后真的那么难懂吗?2021-09-24 4413
-
超前角是什么2021-08-27 2153
-
DCM Boost PFC峰值电流控制芯片2021-05-25 3978
-
电压电流如何进行超前与滞后2020-01-09 7744
-
技术好文:电压电流的超前与滞后2019-11-02 5045
-
PFC变换器输入电流过零畸变校正2011-02-23 2185
-
PFC直接电流控制策略综述2009-12-08 2452
全部0条评论

快来发表一下你的评论吧 !
