

VMC和CMC的LLC控制器仿真对比
控制/MCU
描述
当今频率调制模式的谐振模式控制器绝大部分都是仅使用输出电压或输出电流进行反馈控制,通过反馈环控制IC内部的频率调节器VCO或CCO的相应的控制电压或电流的大小,实现对输出频率的控制,这种控制办法已知至少存在三个缺点:
1.从频率控制到输出的小信号模型上存在2阶极点,而且当工作在谐振频率或低于谐振频率,影响更加明显。这个双极点如同VMC的BUCK变换器一样,在模拟控制中只能通过降低穿越频率来避开双极点的影响,因此就显著的降低闭环带宽,降低了动态响应调整速度。反馈控制也没有直接与原边谐振电流的建立关系,也没有输入电压前馈导致进一步恶化了动态响应。
2.需要高精度和高一致性的振荡器来保证频率调制,同时最低和最高频率需要根据不同的设计进行不同的钳位,需要增加一个独立的引脚为其调整用。
3.原边谐振电流并没有实际参与控制,还需要一个独立的引脚来检查过流和短路等异常工况来保证系统可靠性运行。英飞凌的ICE2HS01G还使用了反馈的状态配合电流检测来进行过流保护,虽然能实现更高可靠性,这无疑进一步增加了系统复杂度。
电流模式控制方法的基本原理体现在使用电流信号和反馈控制量进行比较,根据比较结果定义开关管的开通时间。在电流模式控制器NCP1399中,也是使用此种方法来实现电流模式控制原理。当达到设置电流后,高端管关闭,频率调节器把高端管的开通时间复制给低端管,这样谐振拓扑的开关频率就精确的由原边电流和负载决定。在IC内部具体实现是有一个MCU核,里面有10ns分辨率的高精度数字计数器,把上升沿计数直接复制给下降沿计数即可,这样就能保证非常高的抗干扰性。
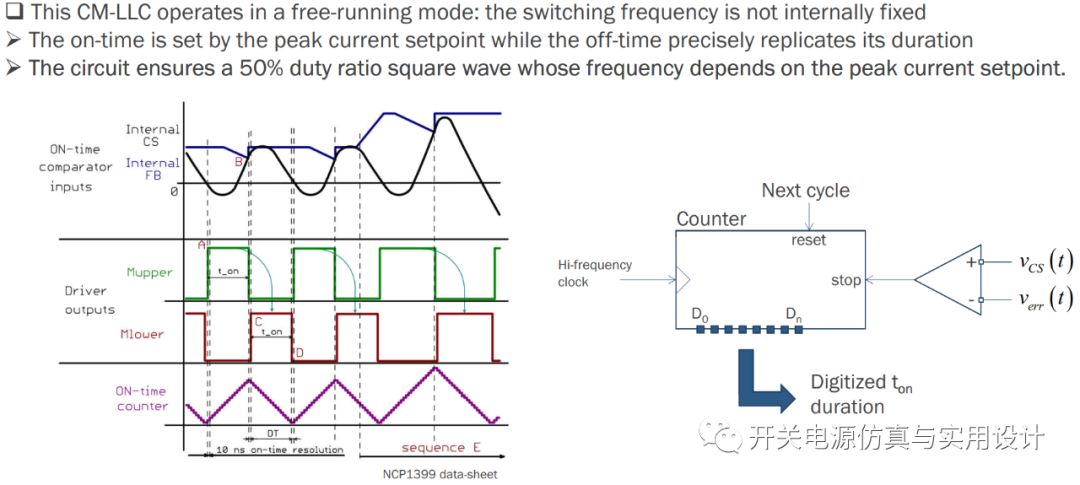
在谐振拓扑中谐振电容上的电压完全反应了谐振电流的大小,该电压可以通过在外部使用两个电容和一些电阻对谐振电容的电压进行采样。通过电容电压串联后的除法衰减,可以把谐振电容两端的电压的表征为谐振电流的被控量送到控制器。这个两个分压电容由用户自己设置,可以随意的设置变换器的负载功率,所以具有了非常高的灵活度。
高端管开通时间比较器的另外一个信号是反馈环的输出,在闭环控制系统中,反馈环的输出电压高低完全反应了输出负载的大小。当负载重时反馈输出电压高,反馈电压高则对应着所需的电流信号大,这也对应着更长的高端管导通时间,即为更低的开关频率。由于反馈引脚的电压完全决定了系统开关频率的高低,在IC内部对该引脚的电压进行了钳位,在内部会把FB的电压信号进行一定比例的衰减,这样主要是为了限制CS引脚的电压变化范围,从而降低开关频率的变化范围,用来确保系统稳定性。
所以NCP1399的控制原理完全可以参见上图来进行理解,原理性的东西已经讲得太多。下面将进行仿真建模,从上文可以看到,电流采样使用两个电容分压,反馈可以使用传统的运放或TL431,这些都很简单。麻烦的地方就是要实现把高端驱动复制到低端驱动上,因为IC内部是用数字计数器实现,只需要相应的增减即可。在模拟仿真环境中,该如何实现呢?我曾经为了这个问题困扰了许久,我只能思考到使用一个固定的电流源对一个电容进行充放电就可以确定ON和OFF的时间相等。也许是L6599的CCO模型先入为主的原因,我一直没有跳出这个框框之中,直到前几天我看到了basso先生为NCP1399建立的仿真模型,才想通了电流模式的PWM产生方法,可见下图所示:
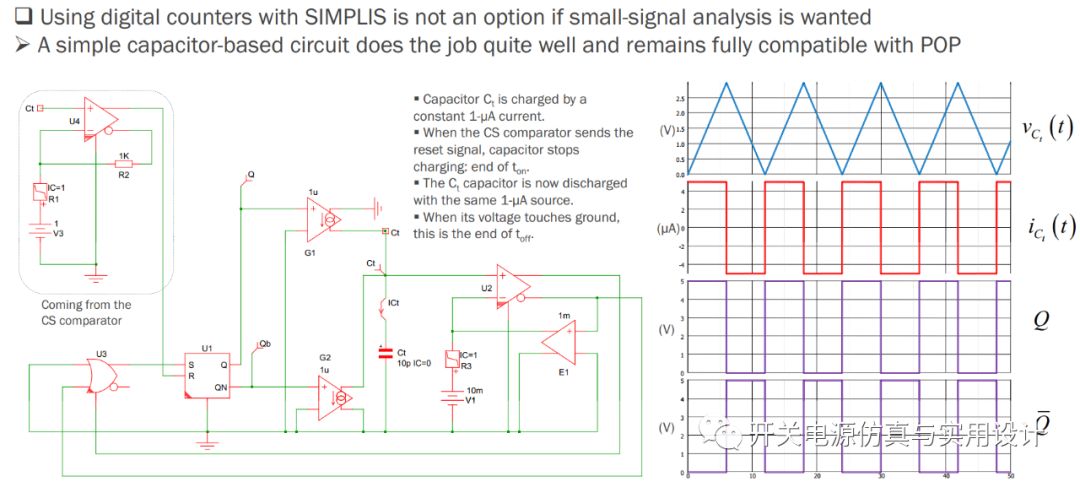
工作原理:
1.使用固定压控电流源G1和G2(同为1uA输出电流)为定时电容CT充放电。当Q为H,G1为CT充电,此时电压上升。
2.当比较器那边的CS的电压高于FB时发出RESET信号,此时Q1为L,G1停止充电。
3.然后QN由L转为H,同样的电流为CT放电,这样就实现了两个驱动信号的时间相等。
4.当VCT的电压低于或等于0V时,这里设置为10mV。比较器U2输出低于10mV的H到SR触发器的S,QN停止放电,置位后Q为H,开始新的充电周期。
这个CCO的与L6599的CCO的不同之处为: L6599的VCT的最高4V和最低1V被限制住,调整频率的方法是调整VCT上三角板的上升和下降时间的速度,通过控制对CT电容的充放电流大小来调整频率 。 而NCP1399的频率调整方法在于不固定VCT的最高电压,在充放电流统一的设置下,充电的时间越长VCT的电压越高,随之从最高电压下降到0也需要的时间更长 。当然这里只是谈原理性仿真,在NCP1399中使用数字计数器来实现这个功能,与上文中的仿真模型大有不同。
下图是L6599的CCO仿真模型。

-
多模式 PFC + 电流模式 LLC 组合控制器2024-06-04 10402
-
教学验证篇丨PPEC+HIL LLC拓扑仿真验证2024-06-11 1232
-
如何在数字控制系统中实现 LLC 的电流型控制?2020-07-09 7019
-
滑模控制器的设计与仿真实现2021-09-07 2217
-
EM仿真和schmetic仿真对比分析哪个好?2021-09-30 2558
-
数字控制挑战传统电源设计理念VMC、CMC2010-06-17 1632
-
集成的LLC控制器、高压功率MOSFET及驱动器2016-05-11 1041
-
HiperLCS™产品系列_集成的LLC控制器、高压功率MOSFET及驱动器2016-11-23 1211
-
【应用方案】仿真对比设计一款LED驱动电源8颗LED灯珠电路2017-04-18 1962
-
使用 LLC 谐振控制器来加速器件运行2022-11-01 685
-
矽力杰 | PFC+LLC组合控制器2022-04-21 15998
-
VMC和CMC的LLC控制器仿真对比2023-07-04 2658
-
TEA2016AAT高效谐振电源的数字控制器配置LLC 和 PFC 组合控制器2024-07-04 5185
-
UCC25661 LLC控制器技术文档总结2025-09-26 1257
-
安世数模混合LLC原边控制器和LLC副边同步整流控制器介绍2025-10-10 1477
全部0条评论

快来发表一下你的评论吧 !
