

请问大功率IGBT驱动保护器如何实现呢?
接口/总线/驱动
描述
数字电路凭借其具有高稳定性、高可靠性、可编程性、易于设计和经济性等突出特点,其应用日益普遍。采用数字化的处理方式是当前电子信息系统的普遍发展趋势。同样地,数字化也将是IGBT驱动器的一个发展趋势。本章以数字化IGBT驱动保护电路设计为例,介绍大功率IGBT驱动保护器的实现。
数字化驱动保护器总体方案设计
IGBT驱动保护器的设计方案包括电源电路、驱动、信号隔离和保护等方案的设计,根据不同的应用需求可采用不同的设计方案。
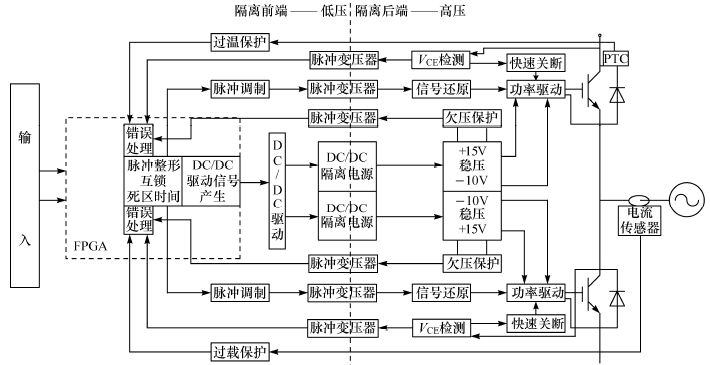
图1 脉冲变压器隔离的IGBT驱动保护方案
图1为采用脉冲变压器进行信号隔离的IGBT驱动保护方案(王立虎,2012)。系统方案主要分为隔离前端的低压部分和隔离后端的高压部分。后端通过物理接口以压接的方式与IGBT模块进行连接,主要包括以下几个部分:功率驱动、VCE检测部分、短路检测及快速关断、欠压检测以及+15V和-10V的隔离电源。前端主要包括数字控制部分(FPGA或CPLD)、过温信号处理、电流信号处理、隔离电源驱动以及过载保护监测。其中数字控制部分包含错误处理,脉冲整形(短脉冲抑制)、互锁、死区时间以及DC/DC隔离电源的驱动信号。输入信号由外部控制单元提供,外部信号首先进入数字处理部分,在内部进行短脉冲抑制、互锁、死区设置等处理之后,通过脉冲调制,利用脉冲变压器传递到后端,在后端通过脉冲整形,还原驱动信号,因为该驱动信号的驱动功率不足以驱动大功率的IGBT模块,所以需通过功率放大来增加驱动功率,使IGBT模块在要求的时间内开通关断,这就是驱动部分的设计。
功率放大所需要的电源来源于前端通过DC/DC隔离电源产生,在IGBT的工作过程中,功率放大所需要的电源如果欠压,将导致IGBT不能按照要求的速度开关,导致错误开关,甚至造成IGBT的直通损坏,因此上下两路电源都需要有欠压检测,以保证功率放大稳定。检测信号通过隔离传输到前端的数字部分进行处理。系统通过VCE检测到IGBT的短路信号后,首先在隔离后端对驱动信号进行快速关断,然后通过隔离传输到前端,进入数字部分进行处理。温度检测与过载检测在通过传感器检测后,直接输入到前端,通过信号的处理,向外部的客户端送出模拟信号,同时将错误信号送进数字部分做相关处理。DC/DC隔离电源采用全桥模式,数字部分输出的信号不足以驱动DC/DC全桥变换的主电路,因此DC/DC隔离电源的隔离前端需要有功率驱动部分。
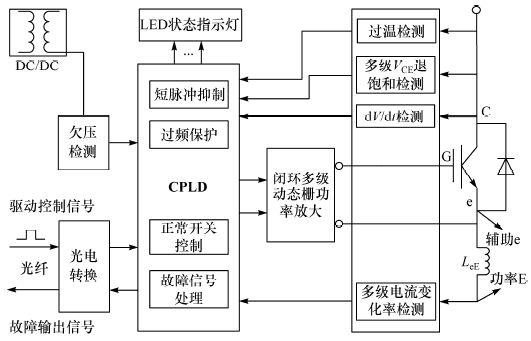
图2 光纤隔离的IGBT驱动方案
图2为采用光纤进行信号隔离的大功率IGBT数字可编程驱动器(王亮亮,2015)。该驱动器的核心是一个数字控制单元CPLD,除此之外还包括以下几个部分:高隔离电压的DC/DC变换器、信号隔离传输部分、闭环多级动态门极驱动部分、多种故障检测和保护部分及状态反馈部分。其中数字控制单元CPLD包含以下模块:短脉冲抑制模块、输入信号过频保护模块、正常开关信号控制模块、多种故障信号检测模块、故障软关断控制模块及相应状态指示灯控制模块。多种故障检测和保护部分都包含以下功能:两级电流变化率dI/dt、多级VCE退饱和检测、IGBT过电流、过温检测和保护、驱动电源欠压检测及保护。
驱动控制信号(PWM)由外部控制单元提供,其经过光纤隔离传输首先进入CPLD数字处理单元,在内部经过短脉冲抑制、过频保护等处理之后,控制闭环多等级动态门极功率放大部分,使IGBT按照实际需求合理正确地开通和关断,这就是整个模块的驱动部分。
当IGBT有故障信号出现时,故障检测及保护部分将检测到的信息送给CPLD,CPLD确认该故障的真实性后,会发出对应的保护指令,进而保护IGBT不受损坏,同时能够实时地向外部控制器反馈IGBT的运行状态,方便用户的使用。整个驱动与保护电路所需要的功率来源于高隔离电压DC/DC变换器,它是保证IGBT安全、可靠运行的能量源泉。
驱动电路设计
在IGBT开通时,驱动电路需要提供一定幅值的正向开通电压,向门极电容充电使IGBT达到饱和。在关断时提供一定幅值的关断电压来抽取门极电容中储存的电荷,使IGBT处于截止状态。因而,可以通过数字芯片控制对应功率器件的通断,来改变回路电流的流向,实现对IGBT的开通和关断操作(文阳等,2016)。
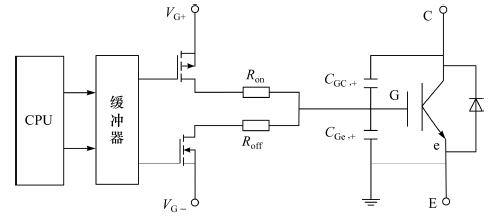
图3 简单的数字化驱动电路
图3为一简单的数字化驱动电路,控制芯片CPU发出的信号进入缓冲器后来控制开关管的开通和关断,从而得到IGBT开通和关断所需要的正向和负向电压。
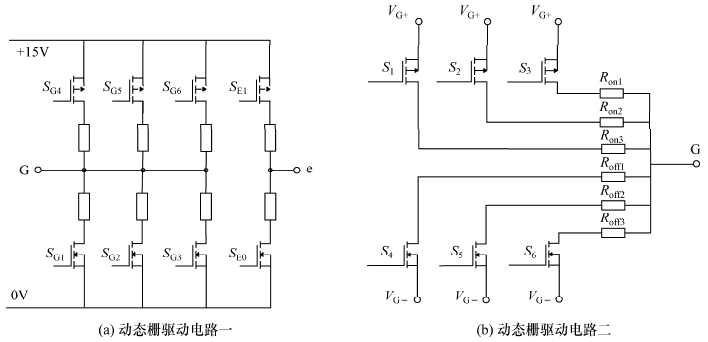
图4 数字化动态门极驱动结构
随着IGBT驱动技术的不断发展,研究人员又提出了可以优化IGBT开关特性的动态门极驱动结构。图4为数字化动态门极驱动结构,其中图4(a)与图4(b)的工作原理大致相同。在IGBT的开关过程中,根据IGBT的开关特性,控制对应的开关管的通断来改变其门极驱动电阻的大小,调节IGBT的开通关断速率,优化其开关特性。
而且,由于控制芯片的可编程性,在驱动功率足够大的情况下,可以通过调整各个开关管的通断组合方式,实现对不同厂家、不同电压等级、不同电流等级以及不同型号的IGBT的开关控制,大大提高了驱动器的兼容性。
此外,图 4(b)所示的驱动结构只需要单路驱动电源便可满足开通关断的驱动电压要求。当要驱动IGBT开通时,通过控制开关管的通断,使发射极e端接至0V电位,门极G接至+15V电位,在门极和发射极之间产生+15V开通驱动电压。当要驱动IGBT关断时,使发射极e端接至+15V电位,门极接通0V电位,在门极和发射极之间产生-15V关断电压。这有利于降低电源的设计成本,减小驱动器的体积(王亮亮等,2016a)。
数字化保护电路设计
对IGBT的保护操作主要包括电压故障的保护、电流故障的保护以及温度故障的保护,而这些故障对应的检测电路的输出信号通常情况下均为数字信号。因而,可将故障信号直接送入数字可编程芯片进行处理分析,根据不同的故障类型配置不同的保护操作。
当检测电路检测到故障信号并反馈给数字化保护电路时,保护电路首先需要对该故障信号进行甄别,判断是否为有效的错误信号,从而避免误保护。对如何确认故障信号,一般采用计数器计数再判断的原理,假设错误信号为低电平有效,在接收到低电平后,如果低电平持续时间小于故障确认时间tc,则认为该电平为干扰电平,大于故障确认时间tc的电平为有效电平。不同类型的故障,确认的时间不一样,具体时间根据该类故障下的电气特性而定。
针对不同类型的故障,其关断保护的控制策略也不同。例如,IGBT在发生短路故障时,集电极电流IC快速上升至额定电流的数倍,此时就需要对IGBT进行软关断操作,从而避免因关断速率过快而引起关断浪涌电压过高,造成IGBT的二次损坏。同时,针对不同类型的故障,其关断保护的响应时间也不同。通常情况下,在检测到IGBT故障信号后,驱动器会对故障信号进行快速的甄别和响应,关断处于故障状态下的IGBT。但是对于IGBT的过载过电流故障,由于其过载时电流值为额定值的1.2~1.5倍,因而过载过电流不需要快速响应,允许有短时间的过载运行状态(王亮亮等,2016b)。
图5为一种数字化保护电路的实现方法,此策略针对不同类型的故障信号,设置不同的关断保护方式和保护动作的响应时间。当故障信号输入到主控制芯片后,控制芯片会对故障类型进行判断。若是为过载故障,则对故障信号的真伪进行甄别,经过故障确认时间tc1后,故障状态仍存在,则对IGBT进行关断保护操作。过载故障时集电极电流较低,因此只需要正常关断即可。针对短路过电流故障保护时的关断应力较大的问题,此策略选用软关断的方式来避免关断过压的二次伤害。
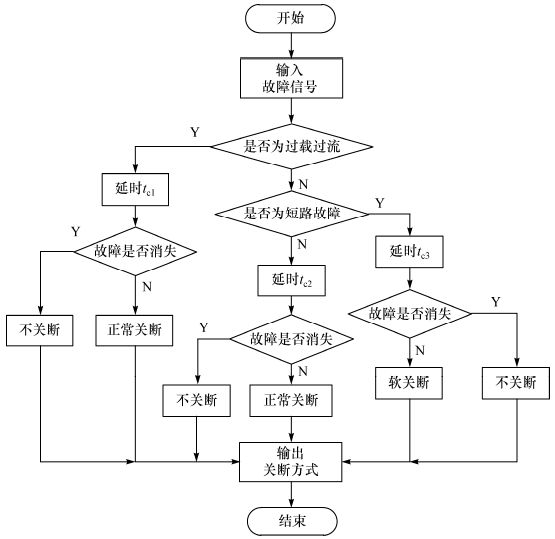
图5 一种数字化保护电路的实现方法
数字化驱动的另一个优势在于其扩展性较强。通常情况下,在IGBT进入故障状态后,驱动器需要将控制信号反馈给主控端,而不同应用场所的反馈信号的定义方式是不同的,因此一般驱动器在这一点上很难做到兼容。而数字化驱动的好处就在于其可编程性,只需要在现有硬件电路的基础上对其控制程序稍作修改,就可以实现相应的目标。
-
热保护器在大功率电动工具的过载保护2024-02-01 2673
-
大功率IGBT模块及驱动技术2023-02-24 1198
-
大功率IGBT驱动的技术特点及发展趋势分析2021-04-20 4612
-
大功率IGBT的驱动技术-串并联技术2021-04-06 2871
-
大功率IGBT怎么分类?2019-11-07 6789
-
双路智能大功率IGBT驱动器2017-03-04 1351
-
高压大功率IGBT驱动型号介绍2012-09-03 1494
-
大功率igbt驱动保护电路的功能解析2012-07-09 5989
-
大功率IGBT驱动技术的现状与发展2012-06-06 9048
-
用于大功率IGBT的驱动电路2012-05-02 1695
-
IGBT高压大功率驱动和保护电路的应用研究2009-11-13 1184
-
IGBT高压大功率驱动和保护电路的应用及原理2009-10-09 3195
全部0条评论

快来发表一下你的评论吧 !
