

KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤
电子说
1.4w人已加入
描述
本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。具体接线方式如下示意图:

步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA的底层设置原因,最好不更改机器人IP地址)
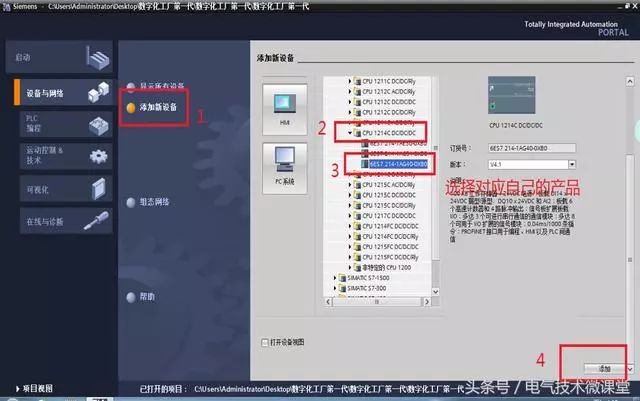
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
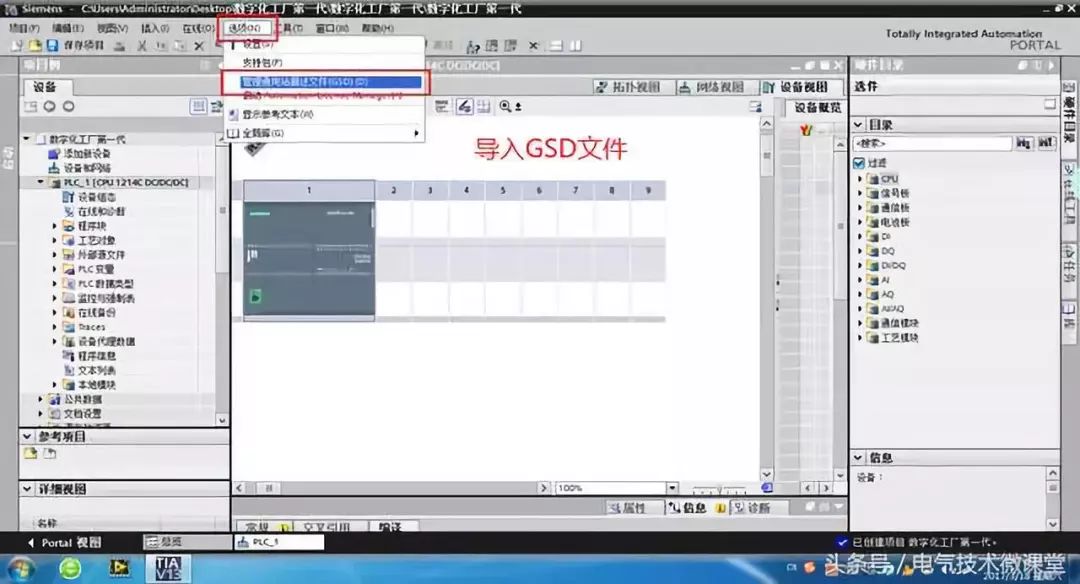
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到。
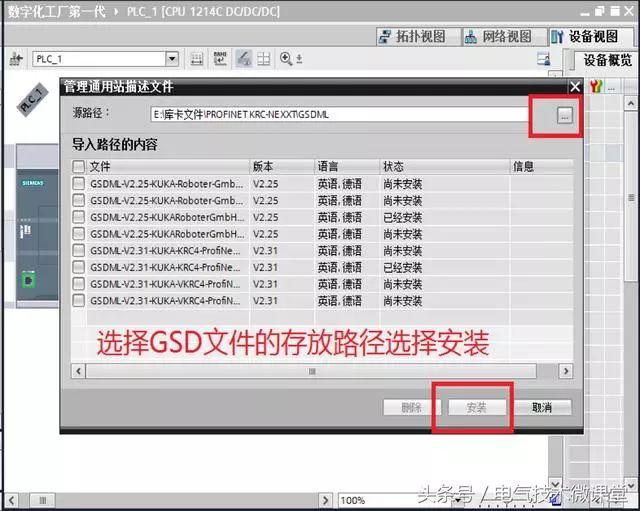
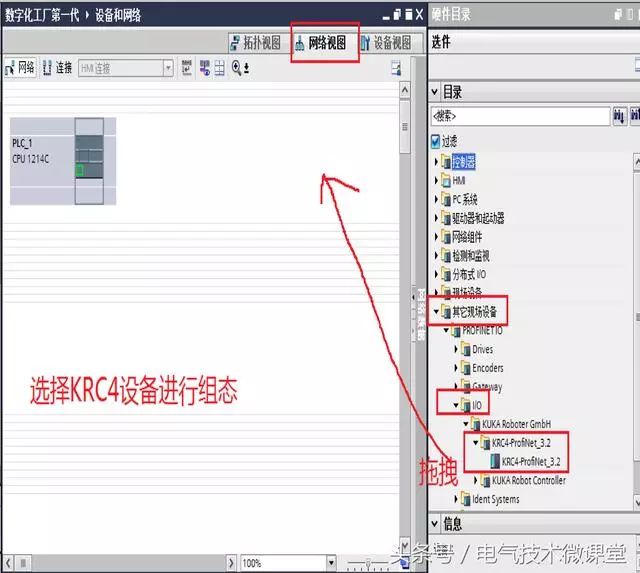
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到PLC。下载完成后PLC会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。也可以使用此方法判断是否连接成功。
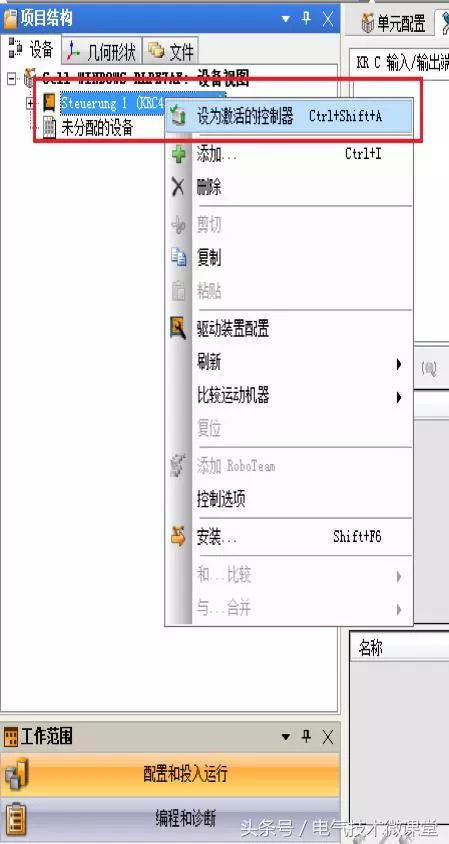
步骤3:WorkVisual对KUKA进行设置
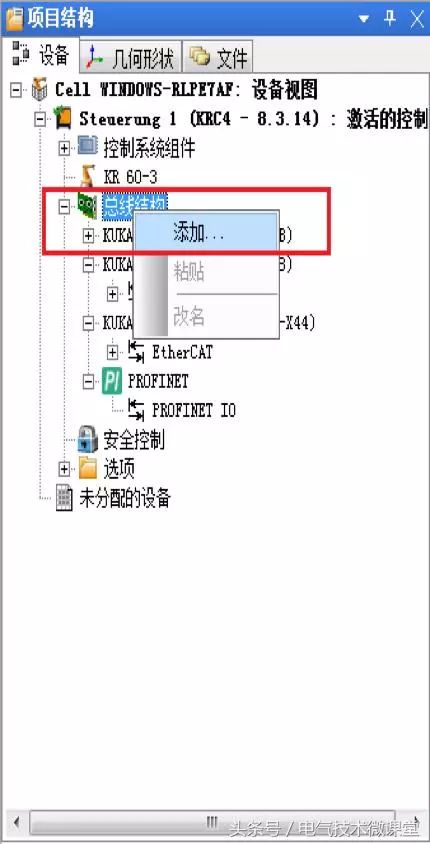
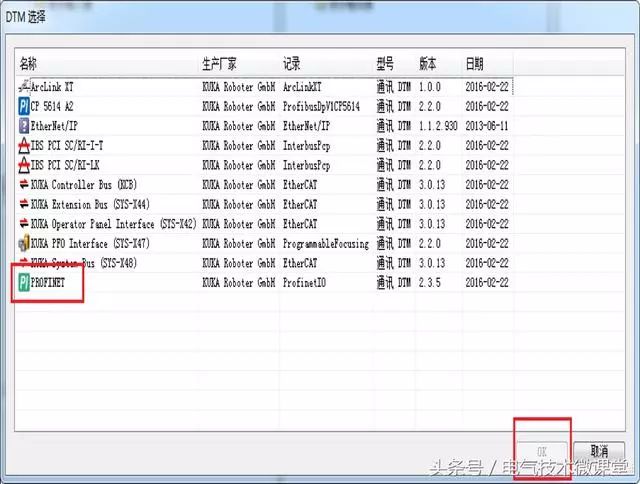
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
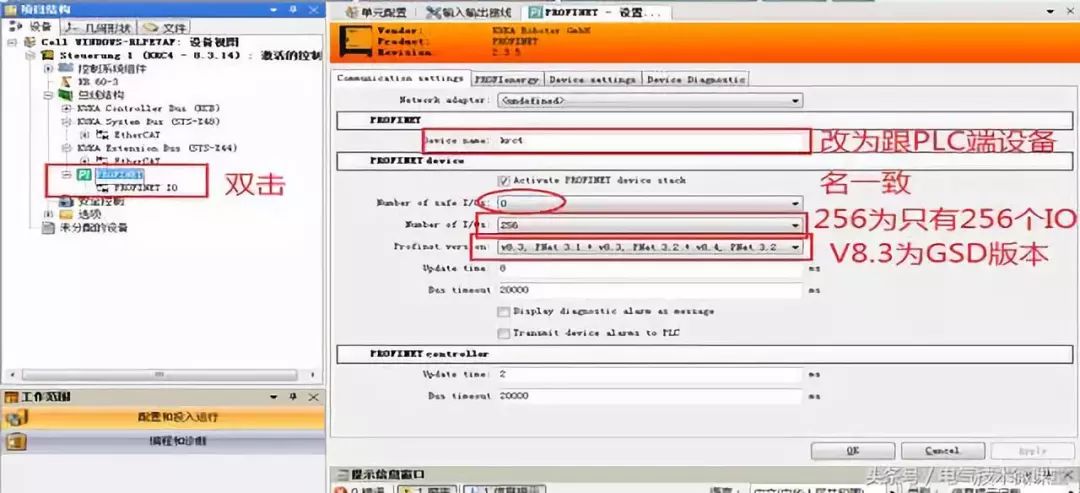
步骤5:双击Profinet进行设置
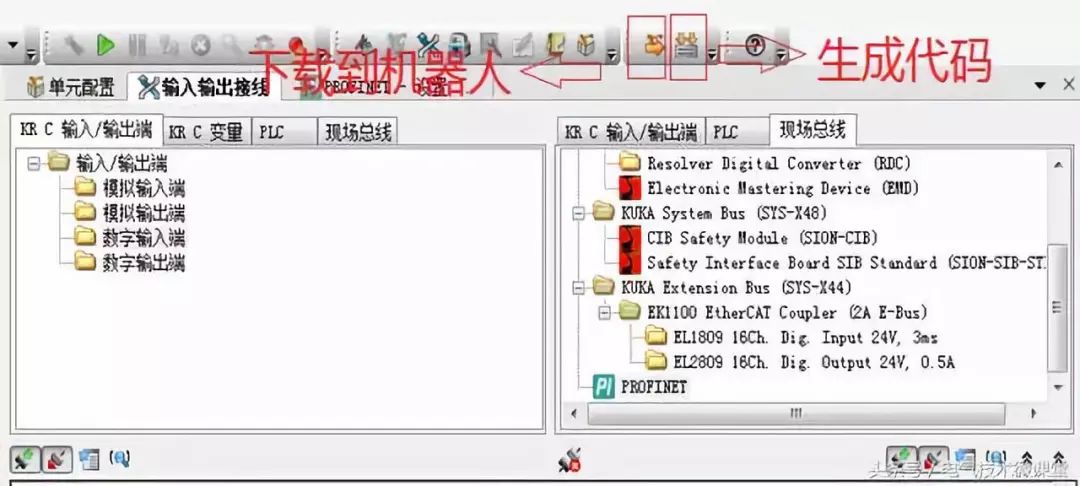
步骤6:进行信号映射
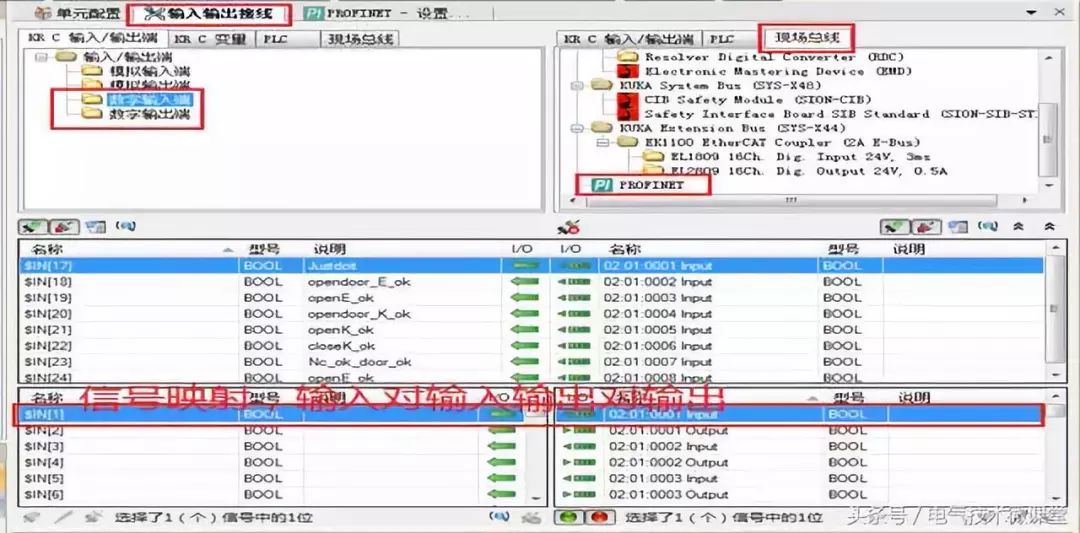
首先生成代码,再下载到控制器,注意在控制器上做好确认工作
步骤7:机器人侧的信号确认:
机器人侧即为映射时的IN(..),PLC侧则是在博图里对KUKA设备设置时的IO地址

审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服伴侣,Profinet转DeviceNet网关通讯保障后连接伺服驱动器与西门子S7-1200PLC2025-11-18 659
-
ABB机器人与西门子PLC的Profinet通讯设置2024-06-17 13292
-
Kuka机器人配置Profinet通讯网关HT3S-PNS-ECS2024-06-13 2022
-
组态王与S7-1200PLC之间 Profinet无线以太网通信2024-01-09 2304
-
介绍S7-1200PLC和V20变频器的Modbus通讯详细步骤2024-01-03 3954
-
西门子1200PLC与海康机器人SC2000系列视觉传感器顺畅连接2023-11-07 1421
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 1859
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 1602
-
介绍西门子S7-1200PLC和V20变频器的Modbus通讯详细步2023-02-20 21238
-
ABB工业机器人与西门子S-1200 PLC通信的实现2022-08-05 16762
-
KUKA机器人伺服驱动模块维修2021-09-17 1877
-
如何将S7-1200PLC连接到EMCP物联网云平台2020-06-30 7156
-
谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤2018-11-09 10465
-
KUKA重型机器人2015-02-03 8315
全部0条评论

快来发表一下你的评论吧 !
