

嵌入式硬件通信串口启用流程
电子说
描述
一、串口启用流程
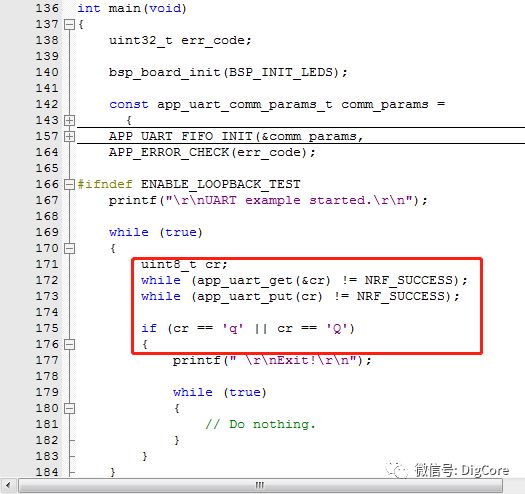
开讲前,先找几款芯片的串口demo程序瞄一眼。
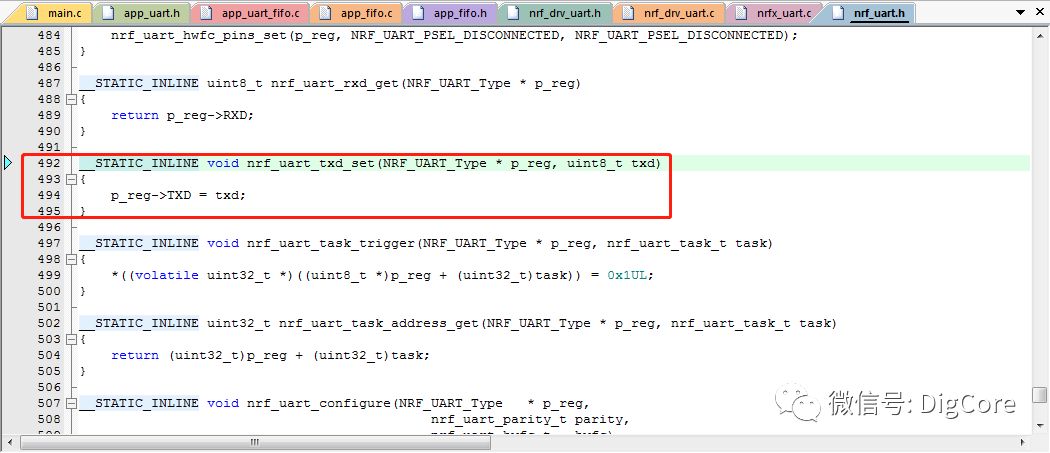
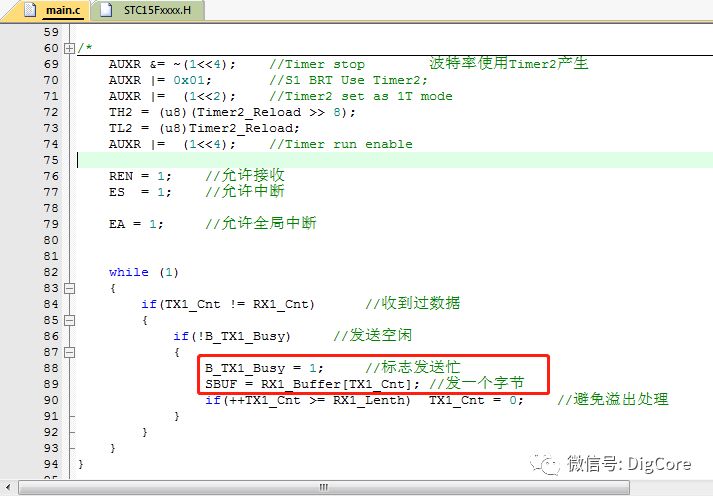
依次有STM32的V3.5标准库、nRF52832的官方demo以及51核的STC15系列单片机的官方DEMO。
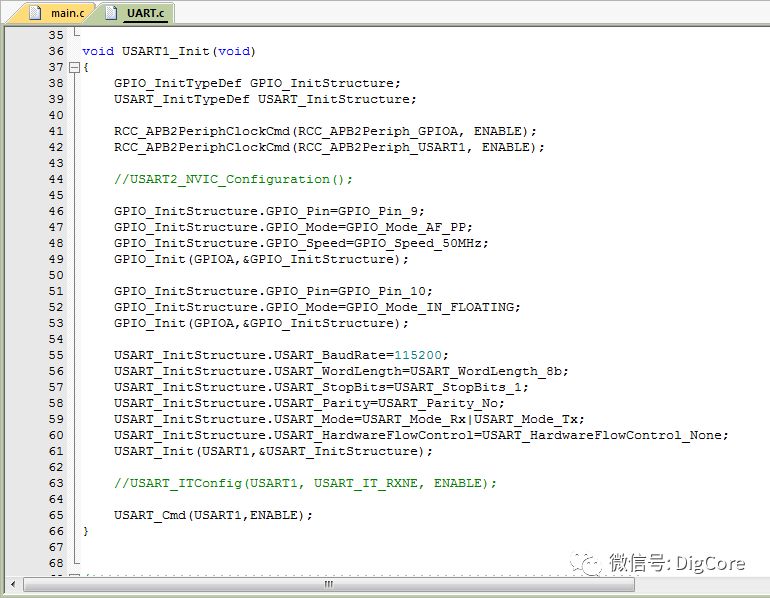
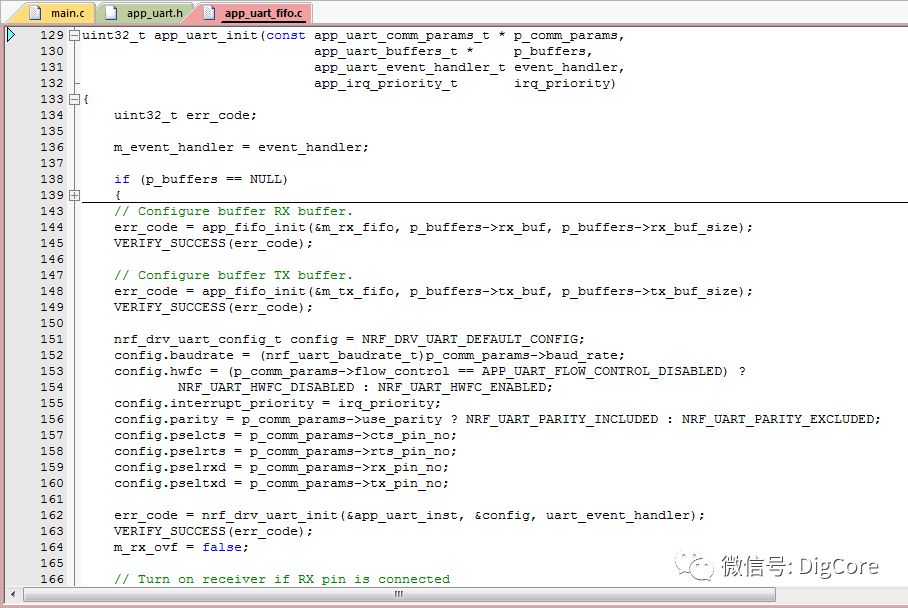
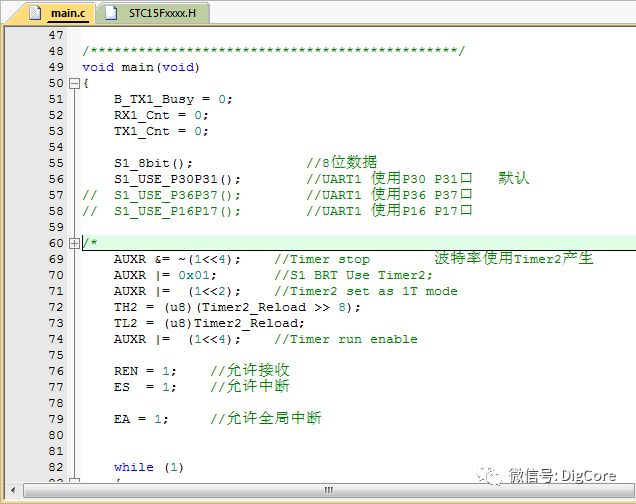
从以上的部分demo例程来看,在启用串口的时候,需要配置的那几个参数有波特率、数据位、校验位、停止位等,从demo的源码中也是能够体现出来的。
而略有不同的是,在引脚配置灵活的ARM中,需要针对引脚进行配置。
二、验证输入输出
完成了串口的初始化,即可对输入输出进行操作,来验证串口是否可以正常的发送和接收数据。
一般的,最直接的方式就是向输出寄存器写入数据,就可以让芯片去完成UART信号输出到对应的引脚上。
如下图依次有STM32的V3.5标准库、nRF52832的官方demo以及51核的STC15系列单片机的官方DEMO。
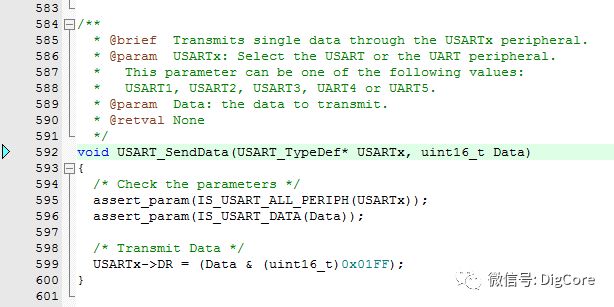
验证串口的输出,即在串口初始化成功后,对串口的输出寄存器写入数据,而芯片引脚则使用USB转TTL模块连接,USB端插入计算机的USB口,利用计算机的串口助手软件实现对数据的收发。
三、调试-输出
开发调试过程中,输出的内容基本上就是想查看的变量值、代码的执行位置跟踪、算法或者某些运算的结果等等。这些输出,仅用于调试阶段,而在人机调试过程中,使用计算机的串口助手软件进行交互,则输出的数据应该便于识读和判断。
1. C库函数printf格式输出重定向到串口输出
输出串口数据过程中,需要向寄存器逐字节传入数据的,而在传送之前必不可少的,就是将要发送的数据、字符放到同一个Buffer后,执行轮询的方式传送直到buffer内容全部被传送。
而这个“放”的过程也是需要做些计算、判断,尤其是增加必要的字符来描述输出信息,保证信息的可识读。
在C标准库printf函数就有格式输出的功能,利用这个接口更便于调试输出这个过程。
这就需要将printf函数重定向到串口输出上!
实现重定向只需3步:
- Options for target选项卡内勾选UseMicroLIB
-
- 在串口实现的 .c文件内,将stdio.h文件和stdarg.h文件包含进来* *
- 重新定义int fputc函数的内部实现
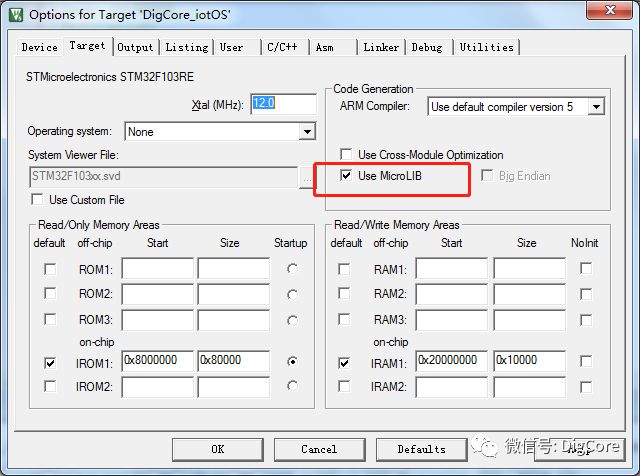
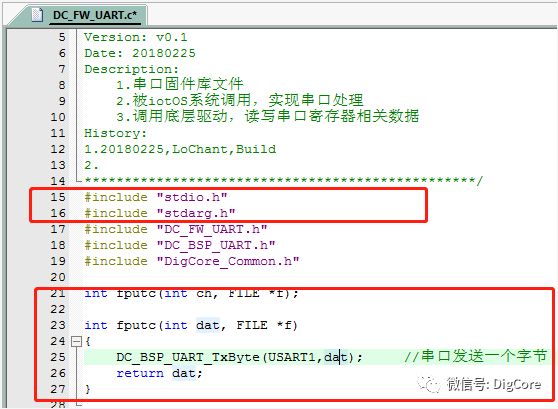
完成以上3步,即可利用printf函数来格式化输出,并且能够在串口上接收到。
2. ANSI C标准中有几个标准预定义宏:
LINE :源代码中的行号(字符串形式)
FILE :当前*.c源码文件的文件名(字符串形式)
DATE :编译日期(字符串形式)
TIME :编译时间(字符串形式)
STDC :当要求程序严格遵循ANSI C标准时该标识被赋值为1;
__cplusplus:当编写C++程序时该标识符被定义。
有了上一步实现printf函数的重定向到串口后,基本就可以完美使用串口进行调试程序。
调试过程中可利用ANSIC标准中的内置宏,比如__LINE__可以很方便跟踪代码执行到哪一行。

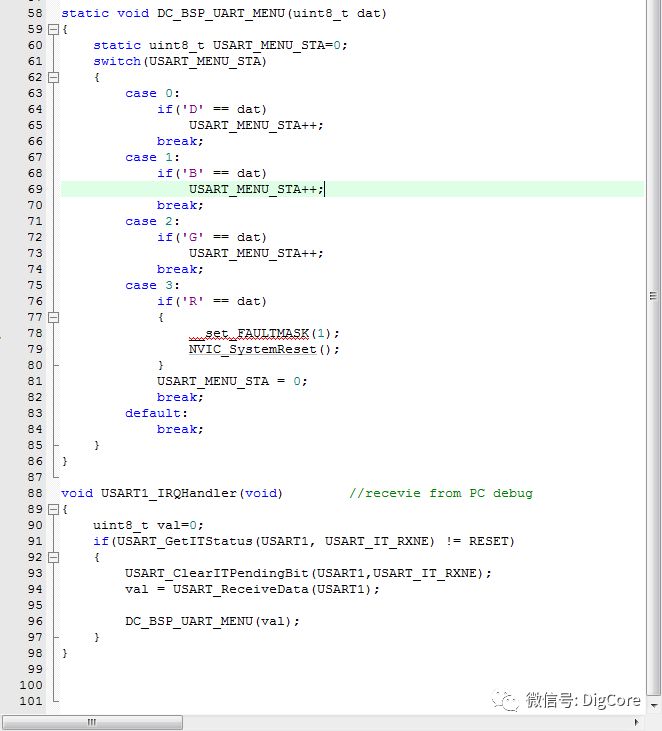
四、调试-输入
串口的接收,有轮询、中断、DMA等方式。
轮询方式,特点是消耗芯片资源,否则容易丢数据;
中断方式,特点是响应快、资源占用低;
DMA方式,各个芯片的配置不同而无法每款芯片都有该功能,所以代码兼容性可移植性较差。
一般地,对输入的数据进行分析判断时,如果是轮询的方式,则直接在收到后即判断;中断和DMA方式,都可以考虑存到buffer后再分析处理。
五、初见数据协议解析
如果是简单几个字符的指令,可以用上述那样简单判断,但是在稍微中等级别的工程项目中,用那样的方式都已经很不便于处理和扩展了。
比如有一串数据,并且长度不确定,将会超过10个字节、20个字节、100个字节甚至更多,那么这时候就必须使用协议解析的方式。
通常的,数据协议都会有协议头、长度、校验、数据内容等部分组成,数据将以包的形式进行收发,这时候使用解析的方式,对数据包进行解析。
这就是广泛使用的“ 起始式协议 ”。
实际的产品中有IC/ID读卡器模块的接口协议:
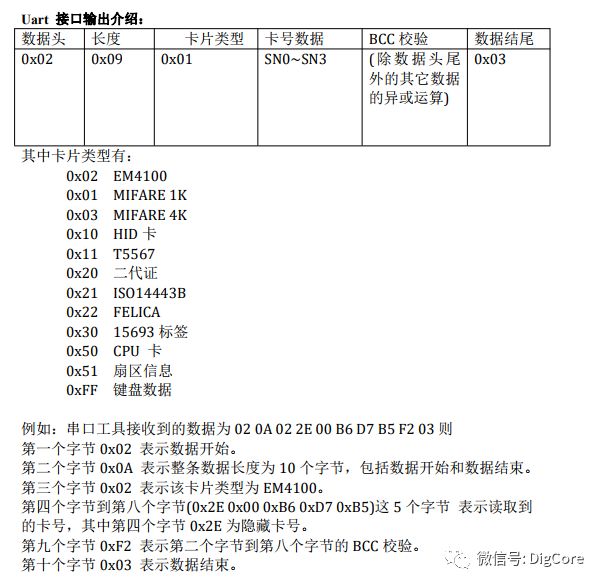
也有使用在PM2.5传感器上的:

这些都属于开发的模块产品,对外使用串口通信,并且数据协议采样了“起始式”的帧结构模式。
-
嵌入式硬件开发的流程是怎样的2021-11-09 1776
-
嵌入式开发流程是怎样的?2021-11-08 1728
-
嵌入式开发流程2021-11-05 1396
-
嵌入式产品开发流程2021-11-04 1389
-
视频教程-嵌入式Linux文件与串口编程-嵌入式2021-11-02 1190
-
ZYNQ嵌入式系统的开发流程2021-10-27 1571
-
【嵌入式】串口间的通信2021-10-20 820
-
多串口通信系统的设计流程是什么?2019-09-05 2107
-
基于有限状态机的嵌入式系统串口通信帧同步方法设计2019-04-10 3595
-
嵌入式硬件通信接口协议中的串行通信接口-SPI2019-02-05 2223
-
基于S3C2410的嵌入式串口通信设计2009-12-23 1039
-
嵌入式系统的USB虚拟串口设计2009-09-27 1367
-
嵌入式系统串口通信分层结构设计与实现2009-08-29 620
全部0条评论

快来发表一下你的评论吧 !
