

伺服控制芯片TMC4671性能概述
工业控制
描述
伺服控制芯片TMC4671性能概述
使用TMC4671伺服控制芯片可以加速设计伺服控制器。
TMC4671是一款完全集成伺服控制芯片,为直流无刷电机、永磁同步电机、2相步进电机、直流有刷电机和音圈电机提供磁场定向控制。
所有的控制功能都被集成在硬件上。集成了ADCs、位置传感器接口、位置差值器,该款功能齐全的伺服控制器,适用于各种伺服应用。
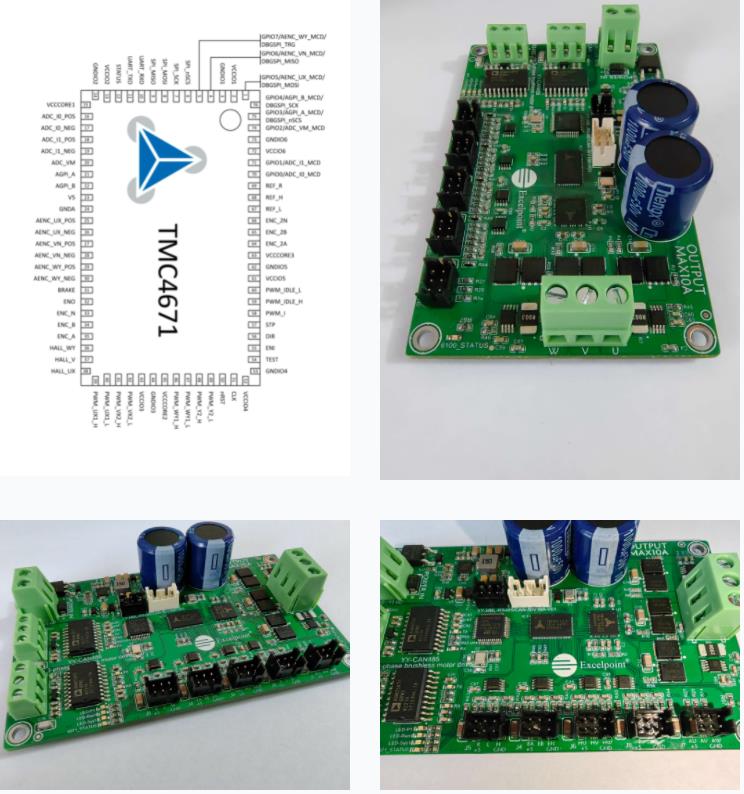
TMC4671旨在快速缩短高性能伺服控制器的上市时间,同时最大限度提高驱动效率和动态性能。通过硬件中的所有时间关键计算,开发动态伺服控制器仅需要几行代码。
它具有高达100kHz的开关频率和控制器更新速率,并具有滤波和插值功能,如数字霍尔信号插值,以实现更顺畅的操作。该集成电路可以与各类编码器协同工作:从A/B/Z增量式简单的数字或模拟霍尔传感器到高分辨率正弦/余弦模拟编码器。传感器可灵活地映射为位置和速度控制回路的输入。凭借其delta-sigma电流检测ADC,TMC4671非常适合用于隔离式delta-sigma前端。
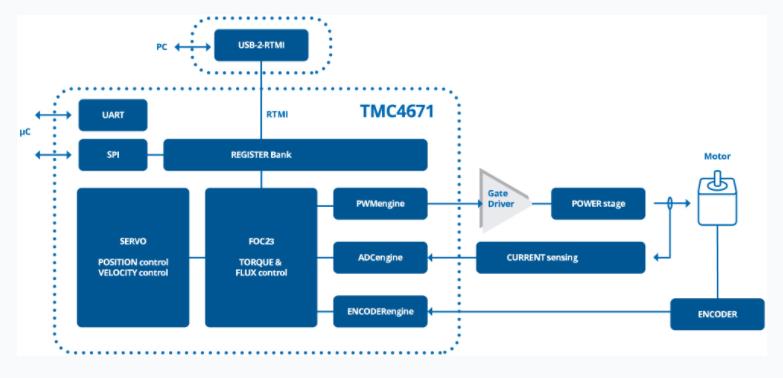
图2. 系统框图
功能简介:
伺服控制芯片、空间磁场矢量控制(FOC)
转矩控制(FOC)、速度控制、位置控制
前馈控制输入
集成ADCs、前端△∑ADCs
编码器引擎:模拟和数字霍尔、模拟和数字编码器
支持三相直流无刷伺服和永磁同步伺服电机、2相步进伺服电机、直流有刷和音圈电机
先进的PWM引擎(25KHz…100KHz)
应用程序SPI+调试(UART、SPI)
脉冲/方向接口
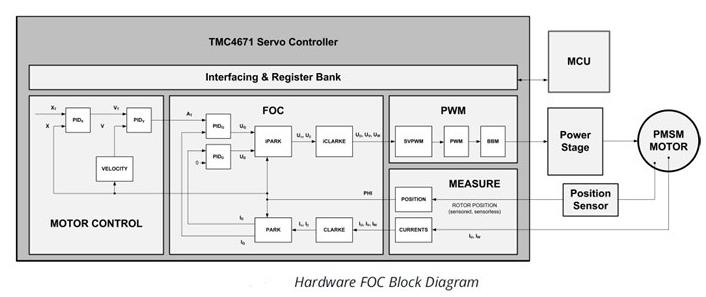
图3. 硬件框图
性能描述:
○ 带有磁场矢量控制(FOC)的伺服控制芯片
转矩控制模式
速度控制模式
位置控制模式
电流控制刷新频率和最大的PWM频率为100KHz (速度和位置控制的刷新频率可以根据当前电流刷新频率的倍数配置)
○ 控制功能/ PI控制器
中期结果的输入和输出可编程斩波
以积分电路结尾保护所有控制
可编程的电压循环向导限制器
目标值的前馈补偿和前馈摩擦补偿
高级前馈控制结构,实现最佳轨迹跟踪性能
扩展的中断请求掩蔽选项和限制器状态寄存器
具有霍尔传感器或/和最小移动的高级编码器初始化算法
○ 运动控制和坡形控制
控制结构的梯形速度斜坡
脉冲/方向接口,方便定位
○ 支持的电机种类
直流无刷电机
永磁同步电机
2相步进电机
直流有刷电机
音圈电机
○ 位置反馈
开环位置发生器(可编程的PRM,RPM/S)用于初始化配置
数字增量编码器(ABN,ABZ 高达5MHz)
第二路数字量编码器输入(双反馈)
数字霍尔输入接口带有临时位置插补功能(H1, H2, H3 resp. HU, HV , HW)
模拟量编码器/模拟量霍尔输入接口(SinCos (0°, 90°) or 0°, 120°, 240°)
多圈位置计数器(32位)
目标位置、速度和目标转矩滤波(双阶)
○ PWM包括SVPWM
可编程的PWM频率范围从20KHz100KHzn
可编程的BBM(BrakeBeforeMake)时间(偏低,偏高)0 ns 。 。 。 2.5_s在10ns步骤内和栅极驱动输入信号
PWM自动调整,用于运动期间改变PWM频率
○ SPI通讯接口
40位数据长度(1个ReadWrite位+7个地址位+32个数据位)
立即SPI读取响应(通过单个数据报进行寄存器读取访问)
SPI时钟频率高达1 MHz(未来版本为8 MHz)
○ TRINAMIC实时监控接口(SPI Master)
通过TRINAMIC的实时监控系统实现实时数据高频采样
需要PCB上的单个10针高密度连接器
高级控制器通过频率响应识别和高级自动调谐支持使用TRINAMIC IDE调整选项
○ UART调试接口
3引脚(GND, RxD, TxD) 3.3V UART接口(1N8; 9600 (default), 115200, 921600, or 3M bps)
简易寄存器访问并行于嵌入式用户应用程序接口(SPI)
○ 供电电压:5V和3.3V;1.8V的VCC_CORE由内部产生
○ IO电压:3.3V用于所有的数字(可由VCCIO选择提供);5V插分模拟量输入范围,3V为单端输入范围
○ 时钟频率:25MHz(需要外部振荡器)
○ 封装:QFN76
-
使用TMC4671对伺服电机进行位置环控制时,能否设置电机的旋转速度?2026-05-26 49
-
伺服控制要 “集成 + 灵活”?TMC4671:硬件实现 FOC,还支持前馈补偿!2025-12-10 832
-
TMC4671的优缺点与tmc4671原理图一文讲解2023-07-06 9422
-
【开奖】小白福音:电机开发利器——ADI TMC4671套件评测2023-05-31 1453
-
TMC4671具有哪些特性参数应用?2021-09-29 2079
-
TMC4671基于硬件FOC伺服电机控制芯片适应BLDCPMSM、两相步进、直流有刷、音圈电机2021-09-28 1609
-
TMC4671相关资料分享2021-06-28 2293
-
硬件伺服控制芯片TMC4671的三环配置方法详细说明2020-05-22 3623
-
德国TRINAMIC硬件伺服FOC控制芯片TMC4671力矩环速度环位置环PI配置方法2020-02-06 6337
-
硬件FOC伺服控制芯片TMC4671编码器相序整定代码2019-07-13 3862
-
TMC4671基于硬件FOC伺服电机控制芯片适应BLDC/PMSM等2018-05-21 14522
-
TMC4671基于硬件FOC伺服电机控制芯片适应BLDC/PMSM、两相步进、直流有刷、音圈电机2018-05-14 18526
全部0条评论

快来发表一下你的评论吧 !
