

人形机器人的伺服电机技术探讨
机器人
554人已加入
描述
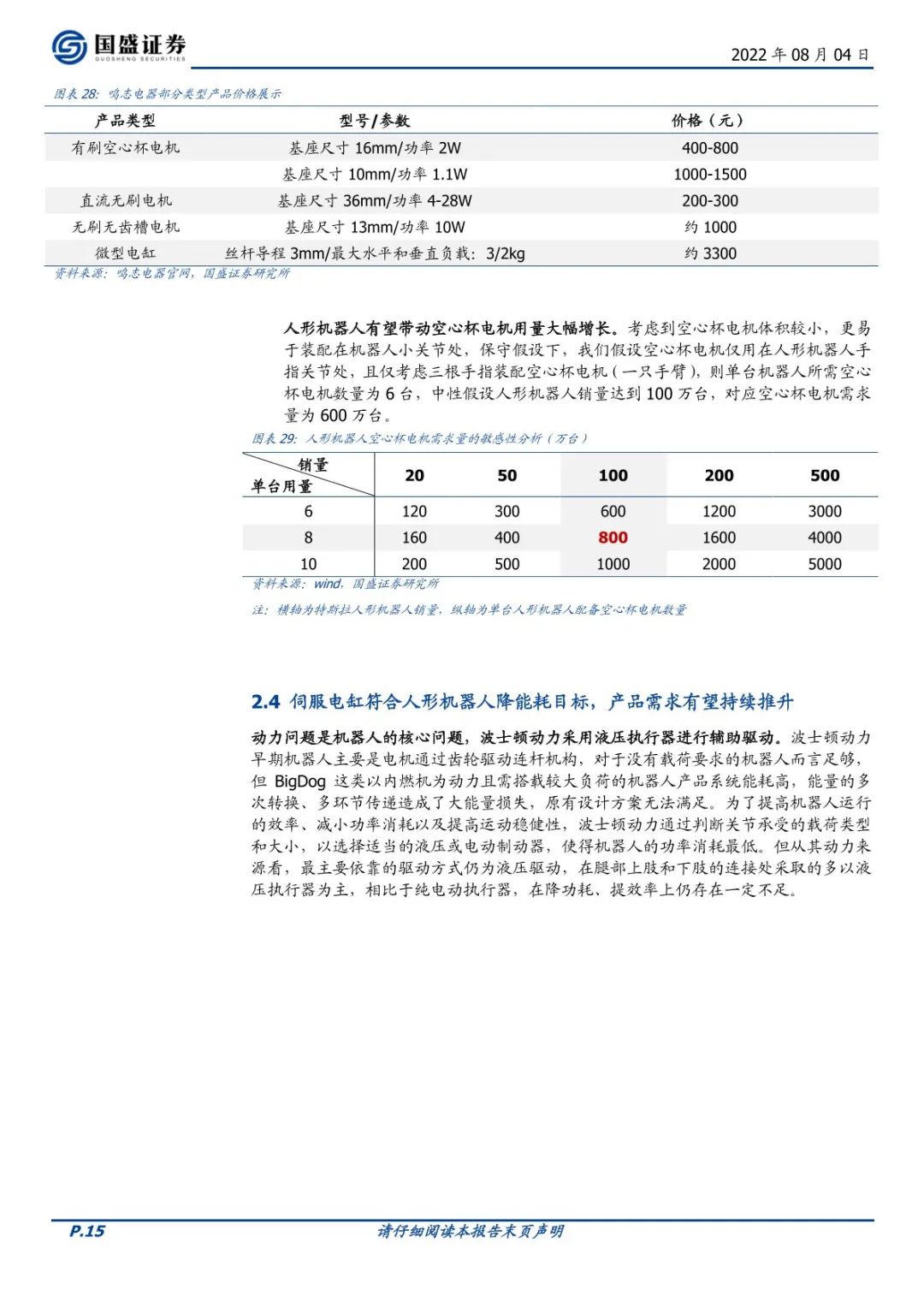
动力问题是机器人的核心问题,波士顿动力采用液压执行器进行辅助驱动。波士顿动力早期机器人主要是电机通过齿轮驱动连杆机构,对于没有载荷要求的机器人而言足够,但BigDog这类以内燃机为动力且需搭载较大负荷的机器人产品系统能耗高,能量的多次转换、多环节传递造成了大能量损失,原有设计方案无法满足。为了提高机器人运行的效率、减小功率消耗以及提高运动稳健性,波士顿动力通过判断关节承受的载荷类型和大小,以选择适当的液压或电动制动器,使得机器人的功率消耗最低。但从其动力来源看,最主要依靠的驱动方式仍为液压驱动,在腿部上肢和下肢的连接处采取的多以液压执行器为主,相比于纯电动执行器,在降功耗、提效率.上仍存在一定不足。



编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服电动缸在人形机器人中的应用2025-02-06 2247
-
揭秘人形机器人成本构成:这三个核心零部件,决定了它能走多远2026-06-01 103
-
日本技术宅自制人形机器人——萌萌哒的初音未来2015-03-06 9031
-
为什么人形机器人更讨人喜欢?2016-05-12 5340
-
小白学机器人伺服电机模块相关资料分享2021-06-28 1436
-
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评2023-12-20 1888
-
伺服电机的介绍与伺服机器人技术难点的分析2017-09-19 2699
-
机器人伺服电机如何选型?2021-06-09 2031
-
人形机器人电机用途2023-06-25 2861
-
人形机器人的几大技术难点是什么2023-07-26 6098
-
人形机器人伺服电机应用概览2023-11-08 2065
-
探讨 GaN FET 在人形机器人中的应用优势2025-02-14 2001
-
主要人形机器人厂商的电机驱动与传感系统对比2025-05-09 3097
-
人形机器人关节电机:永磁电机类型解析2025-08-28 2287
-
人形机器人伺服电机驱动器新动力:高性能电容器的协同作用2025-08-30 1050
全部0条评论

快来发表一下你的评论吧 !
