

如何实现更小、更可靠的实时控制系统
电子说
描述
消费者每天都会与各种各样的系统打交道,这些系统根据外界条件进行相应动作。以汽车为例,当您踩下油门之后,汽车几乎瞬间加速,也就是说,踩完踏板即实现加速,这之间没有明显延迟。
从汽车示例引出文章主题,我们假设汽车是一个系统,外界条件(司机)踩下油门即增加车速,则系统实现了所谓的“实时控制”。实时控制是闭环系统在定义的时间窗口内收集数据、处理数据并更新系统的能力。如果系统错过定义的时间窗口,其稳定性、精度和效率都会降低。控制能力下降可能会影响系统性能;例如,不能达到所需速度,甚至过热。本文将介绍实时控制系统的功能块,并以机器人应用为例进行说明。
系统组件之间的通信尽管不必参与系统控制,但也应与主控制环路共同发挥作用。实时控制涉及的主要功能块包括检测(收集数据)、控制(解释并使用数据)和驱动(更新系统)(见图1)。
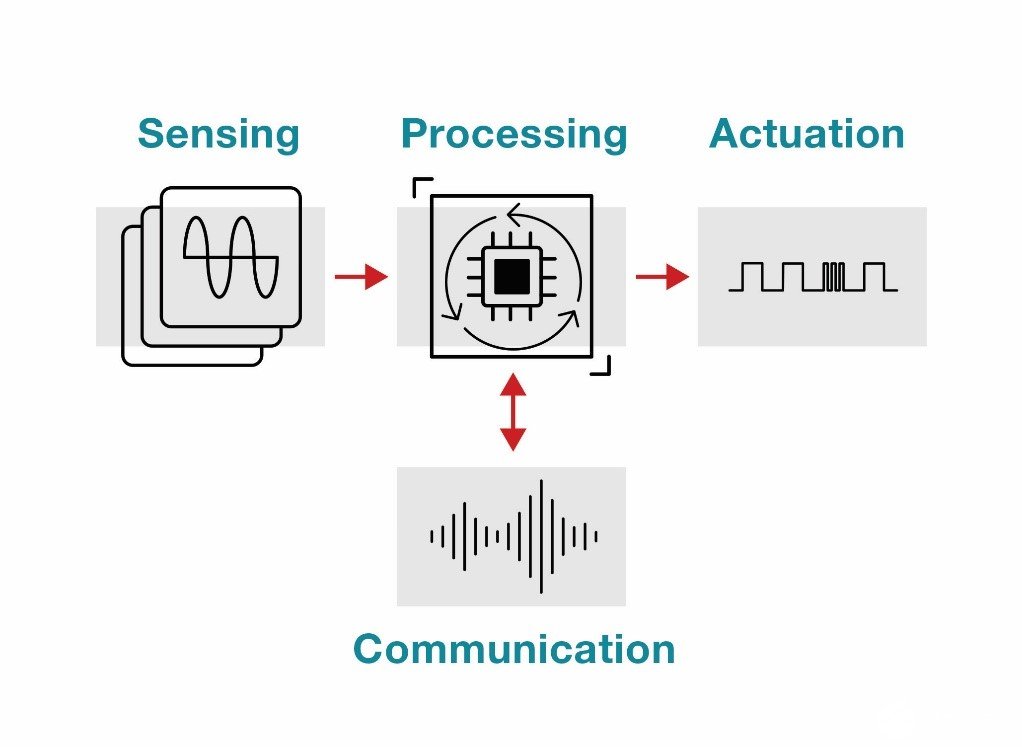
图1:实时控制环路的主要功能块
下面详细介绍这些部分。
检测是指测量电压、电流、电机转速或温度等外部因素。这些关键参数需要准确且精密的测量,以便在特定时间点为系统提供可靠的数据。
中央处理单元将控制技术应用于输入数据,以便计算下一个输出命令。微控制器 (MCU)或控制器(比如 C2000™实时MCU、基于Sitara™ Arm®的MCU、集成式无刷直流电机驱动和直流/直流控制器)具有出色的处理能力,有助于确保系统满足通常为数微秒到数毫秒的超短时间窗口要求。
驱动将计算的输出命令应用于系统,从而控制输出。改变驱动电力电子系统的脉宽调制器(PWM)单元的占空比就是一个驱动示例。有助于增强驱动性能的TI产品包括模拟驱动器、隔离式栅极驱动器和具有集成栅极驱动器的氮化镓 (GaN) 场效应晶体管。
最后,确定性高速通信接口(例如快速串行接口或以太网)实现系统与外部设备或内部组件之间的及时通信。
以机器人为例,实时控制可精确控制电机的位置和转速,机械臂定位精度在100µm以下。通过持续测量电机电流和电压以及电机位置可实现这一精度级。处理单元将测量值与计算值进行比较,如图2所示,然后根据比较结果,调整发送至电机的PWM信号。此外,为满足系统的精度和时间要求,整个过程需在几微秒内完成。
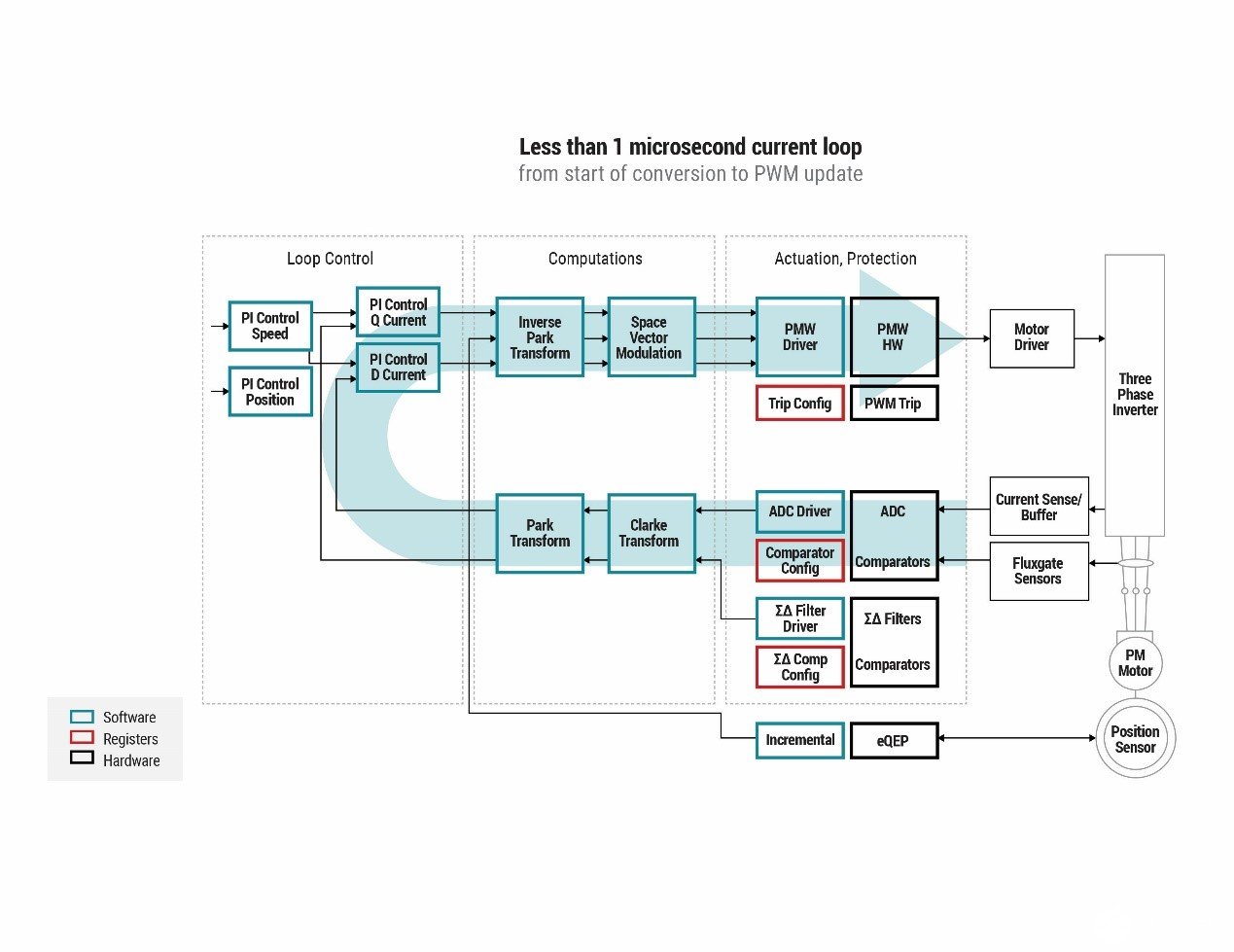
图2:快速电流环路图
实时控制也是实现高效可靠电源系统的基础。例如,实时控制有助于使充电站保持稳定的输出功率,并调节流入汽车电池的电流,从而保证电池寿命并避免过热。将实时控制与MCU和GaN等新技术相结合,可提高功率密度和效率,有助于充分降低应用的功率损耗。
现代电机驱动系统的性能持续提高,因此对实时控制的要求也日益严格。例如,高精度高速计算机数控机械(控制磨床和车床等各种复杂机床的机械)可在转速超过 20,000RPM的情况下实现低于5µm的精度。只有非常快的控制环路才能实现上述功能,这意味着信号测量和系统调整之间的延时时间通常不到1µs。
鉴于高度时间敏感的计算需求,许多设计人员都采用了现场可编程门阵列、外部快速模数转换器和多个MCU的组合。但是TI的C2000 MCU和Sitara处理器可提高模拟集成度,从而在不到 1µs 的时间内执行电流环路,即快速电流环路。通过在现代控制拓扑中充分利用快速电流环路,设计人员能够以更低的成本开发尺寸更小、性能更高的系统。
使用完全集成式解决方案,比如TI的 MCF8316电机驱动器,还可进一步降低成本。 这类器件采用预编程、只需微调的无刷直流电机控制算法,在系统设计阶段,通过MCU的简单I2C接口配置集成的电擦除可编程只读存储器即可实现。它们还提供有硬件配置,支持系统设计人员在没有MCU的情况下调整电机。MCF8316集成了六个为电机提供电流的金属氧化物半导体场效应晶体管,实现了采用7mm x 5mm封装的完整实时电机控制解决方案。
实时控制是电网基础设施、电器、电动和混合动力电动汽车、电力输送、电机驱动和机器人等应用领域的重要组成部分。为进一步提高响应速度,上述所有应用需要不断缩短执行动作的时间窗口。TI全套的检测、处理、控制和通信技术可提供高电源效率和性能以及低延迟响应时间,有助于实现更小、更可靠的实时控制系统。
责任编辑:彭菁
-
WAYON维安WTPAK封装:背部散热,更小!更凉!更可靠!2025-12-14 1429
-
电机微机控制系统可靠性分析2025-04-29 345
-
如何在实时电机控制系统中实现高效、可靠且准确的驱动2022-12-05 1213
-
实时控制系统的功能块解读2022-11-03 826
-
实时控制系统的设计挑战2022-11-02 2476
-
车身控制模块资源,助力实现更高效、更可靠的设计2022-10-28 622
-
怎么样使用Matlab和PLC设计实时控制系统2020-07-31 2119
-
更小巧、更智能、更可靠的电源管理2020-06-02 3125
-
基于DSP+FPGA的控制系统方案设计介绍2019-07-29 3070
-
提高DCS控制系统电源可靠性的方案2018-12-03 2589
-
VB与PLC之实时控制系统2017-02-07 1203
-
分布式控制系统2010-03-01 3437
-
角变形实时测量系统中计算机控制系统的实现2009-07-09 616
全部0条评论

快来发表一下你的评论吧 !
