

波特图中增益裕量GM和相位裕量PM的由来
电子说
描述
这一篇我们来谈其他两个热门指标,老生常谈的稳定裕量:
增益裕量 Gain Margin,以下简称GM
相位裕量 Phase Margin,以下简称PM
系统到底有多稳定?
- 系统的时域响应,收敛还是发散→反应 绝对稳定性 (稳定还是不稳定)
- 系统的时域响应,收敛的平稳度→反应 相对稳定性 (稳定裕量有多大)
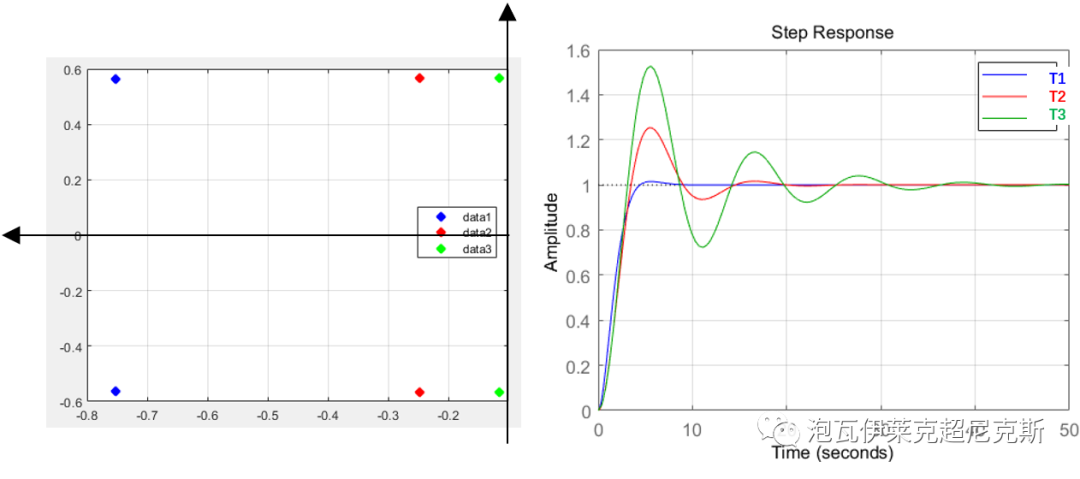
根据劳斯判据,三个闭环典型二阶系统T1,T2,T3,如下图所示,闭环系统特征方程的根都位于左复半平面,因此都是绝对稳定的。
但是,显然其相对稳定性T1>T2>T3。反应在闭环系统特征方程的根的分布上,即距离虚轴(临界区域)越远的,越难振荡,相对稳定性越好。
换句话说,系统****有多稳定,即相距绝对稳定的临界区域的距离,有多远。
波特图中GM和PM的由来
我们常用开环函数loop gain的频率特性,来预测和评估闭环系统的性能,因此闭环系统的极点距离临界区域的距离,得想办法转换到开环函数loop gain的频域指标上,才可以方便地指导设计。这就是导出波特图中GM和PM的出发点。
为了导出GM和PM,我们必须先回到开环函数loop gain的奈奎斯特图(Nyquist曲线,即频域中增益和相角的极坐标,随频率变化的轨迹)。
注:引入极坐标和奈奎斯特图,从而在频域判断线性系统的稳定性的原因,可以自行回顾“自动控制原理”劳斯判据,柯西幅角原理,辅助方程和平面映射等基本内容。
奈奎斯特图和波特图只是在频域的不同表现形式:上述三个闭环典型二阶系统,其开环函数G1,G2,G3的波特图(0+→+∞)和奈奎斯特图(-∞→0-→0+→+∞),两者对应的关系如下。

注:奈奎斯特曲线总是按照(-∞→0-→0+→+∞→-∞...)这个循环形成包围曲线,如下所示。

针对工程实际中最常见的开环函数,一般不含有右半平面极点,本身往往是绝对稳定的,只是动态特性欠佳,需要补偿和校正。
这样的开环函数特性,根据奈奎斯特稳定判据,它的奈奎斯特曲线顺/逆时针包围(-1,j0)的正负和要为0,则有如下:
- 结论:
一般/常见的****稳定系统,其闭环函数特征方程的根,在左半平面相距临界区域(虚轴)的远近,对应了开环函数loop gain奈奎斯特曲线,相距(-1,j0)这个临界点的远近。

以一般/常见形状的开环系统对应的奈奎斯特图为例,可以看到,当奈奎斯特曲线通过增益放大或顺时针旋转的方式,都会造成包围(-1,j0),从而不再满足奈奎斯特稳定性判据。
为了 达到不稳定的临界点而允许放大的增益,和允许顺时针旋转的角度,可作为衡量闭环系统相对稳定性高低的指标,即开环函数loop gain的GM和PM 。

PM对动态的影响
真实的工程实践中,开环函数几乎都是高阶系统。
时域响应波形中我们所关心的形状和对应频率段,都可被一个主导二阶系统近似。这对主导极点的时域响应,可近似该频段的时域响应的大致形状。
故我们仍以典型闭环二阶系统的开环函数为例:阻尼比ξ是影响振荡程度的关键参数。从时域响应来看,阻尼比ξ越大,代表系统的稳定性越好。

闭环二阶系统中,阻尼比ξ恰可以与开环函数的相位裕量PM对应,直接建立函数关系:


- 结论:
针对典型二阶系统主导的闭环系统,其开环函数loop gain的相位裕量:
-
PM≤60°时,阻尼比ξ**≈0.01PM<0.6,PM越低,系统超调越大;**
注:特别的,PM=45°,阻尼比ξ≈0.45,系统超调<20%尚可接受,可作为PM>45°准则的理论支撑。
-
PM>60°时,0.6<阻尼比 ξ <0.01PM ,几乎不再有超调。
GM对动态的影响
对于GM来说,设计者的初衷并非只针对这一个频率点,这和上一节所讨论的穿越频率/带宽的内涵是一致的。
GM设计得大,其本意是希望相位=-180°的高频之处,以及更高的高频频段整体,系统能有足够大的增益衰减,以抑制环路中的高频噪声。
然而,GM和系统其他参数无法解耦, 通过补偿器使高频频段整体进一步增益衰减,势必会带来更多的相位延迟,导致在相对较低的频率就穿越-180°,从而表现出更小的GM。因此,单独探讨和比较GM的大小,没有特别的意义。

- 结论:
设计开环函数loop gain的补偿器时,应优先保证穿越频率和PM尽量满足期望,增益裕量不至过小即可。
-
请问相位裕度怎么看?2024-08-08 383
-
请教如何测试OP放大器的相位裕量?2024-08-16 373
-
电容性负载和相位裕度2018-10-25 3309
-
运放相位裕度的认识与理解2017-11-22 54544
-
全差分放大器的稳定性和相位裕量的介绍2018-08-02 10344
-
浅谈控制系统设计的波特图,相位裕度2021-05-03 11647
-
解析过冲与相位裕量2021-10-25 5968
-
如何用开环SPICE仿真来得到放大电路的闭合速率与相位裕量呢?2023-10-29 1655
-
相位裕度是什么?相位裕度多少合适?2023-10-31 9999
-
过冲与相位裕量2023-12-08 1473
全部0条评论

快来发表一下你的评论吧 !
