

监控机器人运动的过程条件FB ONL/FB PSPS
描述
运动条件被用来阻止机器人。
机器人只有在完全满足编程运动条件的情况下才能移动。
在线形式FB ONL和FB PSPS可用。FB表示运动条件。
运动条件保持活动,直到执行新的运动条件指令为止。
运动条件指令在程序结束时重置。
对运动条件编程FB ONL
FB ONL插入点PLC的起始处,没有行号。
在到达终点的途中对运动状况进行监测。
使用内联形式FB ONL编程

| 1 | 1操作员_, ( |
| 2 |
2操作员 如果选择了操作数EIN(ON)和AUS(OFF),则输入框不可用。! |
| 3 | 布尔操作数(条件)EIN (ON), AUS (OFF), E, A, M, F, T, S |
| 4 |
操作数。如果选择了操作和EIN(ON)和AUS(OFF),则输入框不可用。 值的范围:取决于操作数 |
| 5 | 操作人员 ) |
运动内联形式被扩展为包括形式末尾的字母F。
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] F
FB ONL = E12
带有FB ONL的示例程序
1 ...
2 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
3 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] F
FB ONL = E12
4 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
5 ...
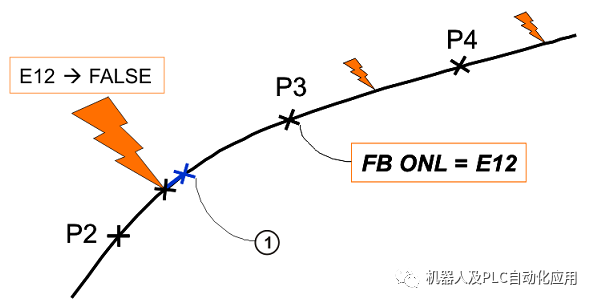
如果输入12设置为AUS(FALSE)(斜坡下降制动),则机器人停止在路径上。
编程运动条件FB PSPS
多个FB PSPS可以在一个Point PLC中编程。
运动条件FB PSPS从编程的点PLC中的线路激活。
使用内联形式FB PSPS编程

| 1 | 1操作员_, ( |
| 2 |
2操作员 如果选择了操作数EIN(ON)和AUS(OFF),则输入框不可用。! |
| 3 | 布尔操作数(条件)EIN (ON), AUS (OFF), E, A, M, F, T, S |
| 4 |
操作数。如果选择了操作和EIN(ON)和AUS(OFF),则输入框不可用。 值的范围:取决于操作数 |
| 5 | 操作人员 ) |
当使用点PLC时,运动内联形式被扩展为包括形式结尾处的字母P。
PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] P
1: FB PSPS = E12
带有FB PSPS的示例程序
1 ...
2 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
3 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s] P
1: FB PSPS = E12
4 PTP VB=100% VE=100% ACC=100% RobWzg=1 Base=1 SPSTrig=0 [1/100s]
5 ...
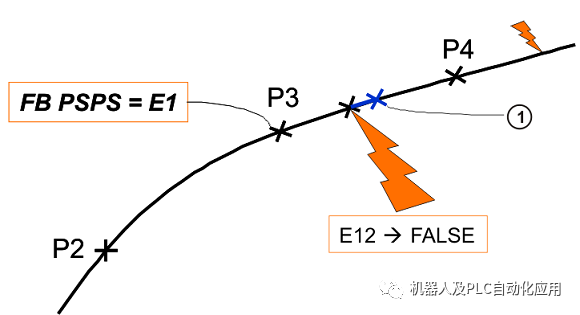
如果输入12设置为AUS(FALSE)(斜坡下降制动),则机器人停止在路径上。
运动状态编程监测程序:
1.选择运动。
2.通过按下PLC打开软键打开点PLC。
3.选择软键“命令”>“Warte/FB”>“FB ONL”或“FB PSPS”。
4.以内联形式设置参数。
5.使用Cmd Ok保存指令。
-
树莓派打造视频监控机器人Verybot2014-09-18 112939
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
机器人依靠什么装置运动?2015-02-03 6336
-
机器人的主要技术参数2017-08-15 7571
-
工业机器人的工作原理2017-12-15 4849
-
机器人基础书籍2019-05-22 3697
-
智能监控机器人该怎么设计?2019-10-14 4546
-
机器人的运动范围是多少2020-06-01 5947
-
机器人运动控制技术2021-07-28 2385
-
移动机器人的三种主要运动系统2021-09-01 2267
-
机器人的控制系统2021-09-13 2013
-
机器人运动过程等待条件FB SPS的结合BRAKE深入分析2020-06-28 3275
-
控制KUKA安全机器人的PLC标准功能块FB 2922020-12-23 4358
-
PLC控制/监控机器人抓手故障的编写2022-03-11 2593
-
为什么要对移动条件FB PSPS进行编程呢2022-07-23 2236
全部0条评论

快来发表一下你的评论吧 !
