

负反馈电路的优缺点,运算放大器反馈电路分析
描述
电子系统的主要关注点是稳定性和准确性,为了保持这些关键因素,输出的某些部分需要连接回系统的输入,这称为反馈。
控制系统根据反馈连接分为两种类型,例如闭环系统和开环系统。开环控制系统不包含任何反馈路径,而闭环系统包含用于自动纠正错误的反馈路径。
根据反馈的性质,闭环系统又分为两种类型,它们是正反馈系统和负反馈系统。在正反馈系统中,反馈与输入信号相加。
在负反馈信号中,从输入信号中减去一定量的信号以调节输出。基于负系统工作的系统被称为“负反馈电路”。这也称为“退化反馈”。
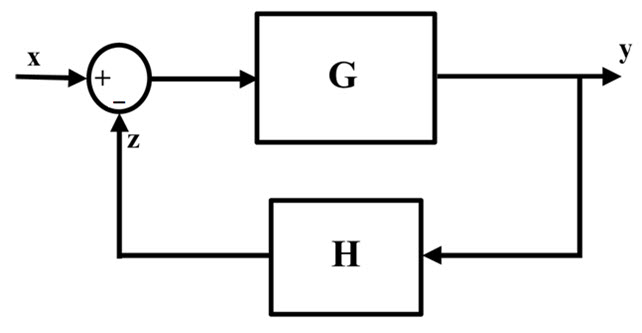
负反馈系统的基本框图如下所示,分别以 X、Y、Z 作为输入、输出和反馈回路。
一、晶体管反馈电路
用晶体管设计的电路的缺点是增益、失真、输入和输出电阻以及信噪比等特性取决于晶体管的特性。这个困难可以通过引入负反馈来克服。负反馈减少了电路中的失真,并使我们能够将输入和输出控制到所需的水平。
1、射极跟随器电路中的反馈
射极跟随器电路如下图所示。晶体管的发射极通过电阻接地,输出在发射极和接地电阻的并联节点处测量。其中 V
BE是晶体管的基极和发射极之间的压降,射极跟随器电路的负反馈操作可表示为 V in = V BE + V out。

现在 V BE = V in – V out。如果电路的反馈商 B = 1,则增益可以计算为 A = 1/B = 1。
2、射极跟随器电路的优点
这种射极跟随器电路提供了两个主要优点:
它提供电流放大而不提供任何电压增益
它提供阻抗匹配。
3、共发射极电路反馈
共发射极电路如下图所示。晶体管的发射极通过电阻 Re 接地,输出在集电极和电源电阻 Rc 的并联节点处测量。
当 VBE 是晶体管的基极和发射极之间的压降时,共发射极电路的输入可表示为 V in = V BE + i E R E。该电路的输出为Vout =
-i Ç ř Ç。

在共发射极晶体管中引入负反馈有两种方法。这两种方法如下所示:


上图a、b中的电路是同一个电路,采用不同的负反馈连接方式。
二、运算放大器反馈电路
与反馈相连的运放电路称为“运放反馈电路”。带负反馈连接的运算放大器有两种应用。它们是非反相运算放大器电路反相运算放大器电路。
1、同相运放电路
同相运算放大器电路如下所示。该电路的输入连接到运算放大器的同相端子,反馈信号连接到通过电阻接地的反相端子。因此它具有高输入阻抗。

我们可以轻松确定同相运算放大器的增益。由于两个输入端的电压相同,运算放大器的增益将非常高。假设没有电流流入运算放大器,则两个电阻中的电流相同。
由于电路形成分压器电路,反相输入端的电压与同相输入端的电压相同,这意味着 Vin = Vout x R1 / (R1 +
R2)。同相运算放大器的增益可以计算为
Vout/Vin = AV = 1 + R2/R1
这可以通过非反相放大器电路操作清楚地解释。
2、同相放大器
使用运放的同相放大器如下图所示,其中输入连接到运放的正端或同相端。

在同相放大器中,输出的性质将与输入信号的性质相同。也就是说,如果输入信号为正,则输出同样为正,如果输入信号为负,则输出也为负。
3、运算放大器的增益方程
如果开环增益为 AOL,则同相运算放大器的输出电压为:
VOut = AOL (Vin – V – ) → (1)
其中 V- 是输出电压的函数,由电阻器 R1 和 R2 形成的分压器产生。由于运算放大器的负端将具有高阻抗,因此等于
V- = β VOut → (2)
其中 β = R1 / (R1 + R2)。
现在将方程(2)代入方程(1),我们得到:
VOut = AOL(Vin – β VOut)
通过解决这个问题,我们得到:
V¬Out = Vin (1/(β+1/AOL))
如果AOL的值很高,那么代入β的值,我们得到:
V¬Out = Vin (1+ R1/R2 )
4、反相运放电路
反相运算放大器电路如下所示。该电路的输入连接到运算放大器的反相端或负端,反馈信号也连接到反相端。反相运算放大器电路的输出与其输入信号相比相差 1800
倍,并且提供了一条虚拟路径。

在这个电路中,输入本身没有消耗电流。所以流过电阻 R1 和 R2 的电流是相同的。因此 Vout/R2 = Vin/R1。现在电路 Av
的电压增益为
Vout/Vin = AV = – R2/R1
这可以通过反相放大器电路操作清楚地解释。
5、反相放大器
使用运放的反相放大器如下图所示,其中输入连接到运放的负端或反相端。
在反相放大器中,输出的性质将与输入信号的性质相反。也就是说,如果输入信号为正,输出也为负,同样,如果输入信号为正,输出也为负。
6、运算放大器的增益方程
我们可以用同相运放电路的输出电压方程求出反相运放电路的增益。
VOut = AOL (Vin – V – ) → (1)
这里 V –由 R f和 R in形成的分压器计算得出,它是输入和输出电压(Vout 和 Vin)的函数。所以
V – = 1/(R f + R in ) (R f V in + R in V out ) → (2)
现在将方程(2)代入方程(1),我们得到:
V输出= -V输入。(A(OL ).R f )/(R f + R in + A(OL ).R in )
如果开环增益值 AOL 非常高,则:
VOut = -Vin (1+ R f /R in )
有时,在运算放大器的接地和非反相输出之间插入一个电阻器,以降低由于偏置电流电压下降引起的输入失调电压。这减少了运算放大器的失真。为了消除不需要的直流电流,在运算放大器的输入端串联一个隔直流电容器。
三、负反馈的优点
(1)负反馈可以稳定几乎任何类型的干扰或噪声发生。
(2)它用于克服系统的非线性。
(3)它帮助我们拉平系统的频率响应,并允许我们获得所需的频率响应曲线。(减少频率失真)
(4)负反馈使系统较少依赖于系统的温度和其他外部特性。
(5)它增加了输入电阻,即它增加了输入阻抗
(6)降低输出电阻,即降低输出阻抗
(7)增加输出信号的带宽
(8)降低系统对外部特性的敏感性。
(9)提供偏置点稳定性和更好的 CMMR。
四、负反馈的缺点
(1)连接负反馈会降低系统的整体增益。
(2)如果系统设计不当,可能会导致产生振荡。
-
负反馈电阻电路分析简述2011-08-04 3544
-
负反馈电阻电路原理分析概述2011-09-21 10763
-
反馈电容对VFB和CFB运算放大器的影响2015-11-20 2987
-
反馈电路2018-10-22 2927
-
一文搞定----电压串联负反馈电路和电流串联负反馈电路如何区分2019-03-11 4605
-
负反馈系统的优点2019-04-16 6301
-
如何设计用于运算放大器的共模反馈电路?2021-04-20 5040
-
负反馈放大电路中反馈电路的作用是什么2021-04-22 4297
-
光二极管运算放大器T形反馈电路-直接反馈电路-差分放大器电路2008-05-15 1902
-
放大器反馈电路2016-11-18 923
-
负反馈放大电路详细解析:负反馈电路作用,反馈的概念,负反馈电路分类,负反馈电路分析方法2017-05-09 27414
-
负反馈放大器电路分析 判断电流负反馈电路方法2018-04-10 8180
-
新概念模拟电路之负反馈和运算放大器基础PDF版电子书免费下载2019-03-12 2993
-
介绍放大器正、负反馈基础电路与仿真2023-02-22 3081
-
运算放大器正反馈电路作用2023-12-13 3155
全部0条评论

快来发表一下你的评论吧 !
