

基于改进扰动观察法的光伏MPPT控制研究
描述
摘 要:
为解决传统扰动观察法无法兼顾最大功率点跟踪速度及稳定性的问题,提出一种改进的扰动观察法。新的控制策略将|dP/dV|作为步长的调整系数,通过步长的不断调整来更好地跟踪最大功率点。利用Matlab/Simulink进行仿真实验,实验结果表明,改进的扰动观察法不仅能够保证最大功率点的跟踪速度,还明显降低了系统在最大功率点的振荡幅度,在一定程度上保证了系统运行的稳定性,避免了能量的过多损失。
0引言
近些年来,随着传统能源日益短缺、环境问题形势严峻,利用和开发新能源已经是各国的研究重点。在碳达峰、碳中和目标的推动下,大力发展太阳能发电成为必然[1]。太阳能作为优质的可再生能源,具有环保性、广泛性和经济性等优势,市场潜力和开发前景巨大,已被应用到各个领域,发挥了良好的作用[2]。对于已知的光伏系统而言,其最大功率与外界环境息息相关,如太阳光照强度、环境温度等[3]。因此,为获得最大功率,引入最大功率的算法十分必要。当前,功率追踪方法有很多,扰动观察法和电导增量法是目前最常使用的两种算法,另外还有很多人工智能算法应用于最大功率点的追踪,例如粒子群优化算法、布谷鸟算法、神经网络算法等,智能算法虽然搜索能力强,能在复杂的环境中寻找最大功率点,但其需要多次复杂的计算,而且自寻优时间过长[4]。
在诸多算法中,扰动观察法需要的未知参数少,计算简单方便,找寻最大功率点的效率较高,能够更好地应用于光伏发电系统。传统的扰动观察往往采用固定步长进行扰动,系统输出功率在最大功率点附近振荡明显,导致输出不稳定,造成能量损失[5]。因此,本文采用变步长跟踪扰动观察法来改善速度与稳定性,提高太阳能转化效率,减少光伏发电系统最大功率状态运行下振荡所带来的能量损失,最后通过Matlab/Simulink进行仿真。
1光伏电池的模型与特性
光伏电池是一个能量转换装置,它可以将太阳能通过电池内部的半导体结构直接转换成可控且有规律的电能[6]。为了在光伏系统的设计中更好地分析光伏电池的特性,以及与光伏控制系统更好地适配,达到最佳发电效果,有必要建立光伏电池的数学模型,如图1所示。图中的二极管D模拟光伏电池PN结内电场的分流作用,分流之后的能量输出到负载RL,光伏电池的内部损耗由并联的电阻RP和串联的电阻RS表示[7]。
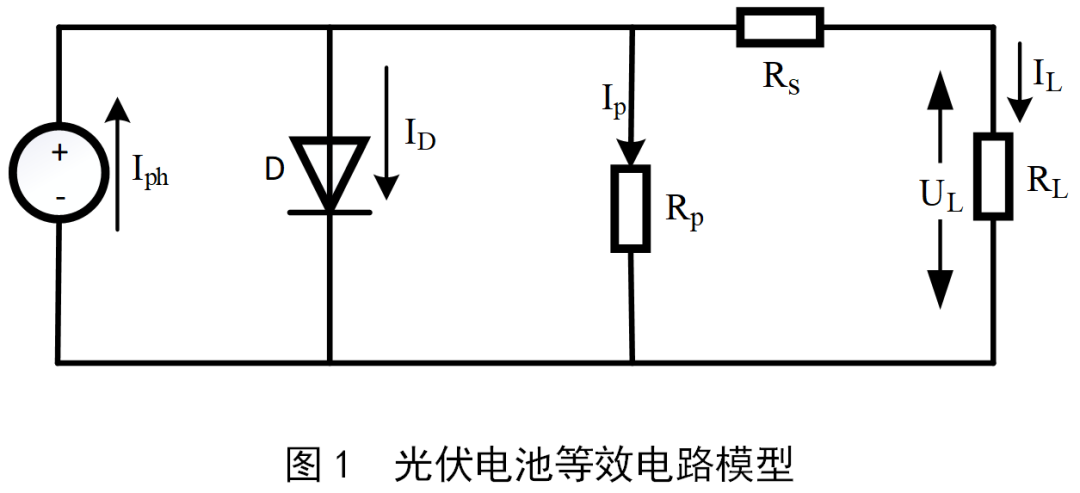
由图1可知,根据KCL定律可得:

其中:

在图1所示的光伏电池等效电路中,串联电阻Rs较小,并联电阻RP较大且大于串联电阻RS,对于理想光伏电池可忽略RP的影响,所以式(1)可简化为:

式(3)中各个物理量含义如表1所示。
2光伏电池的输出特性
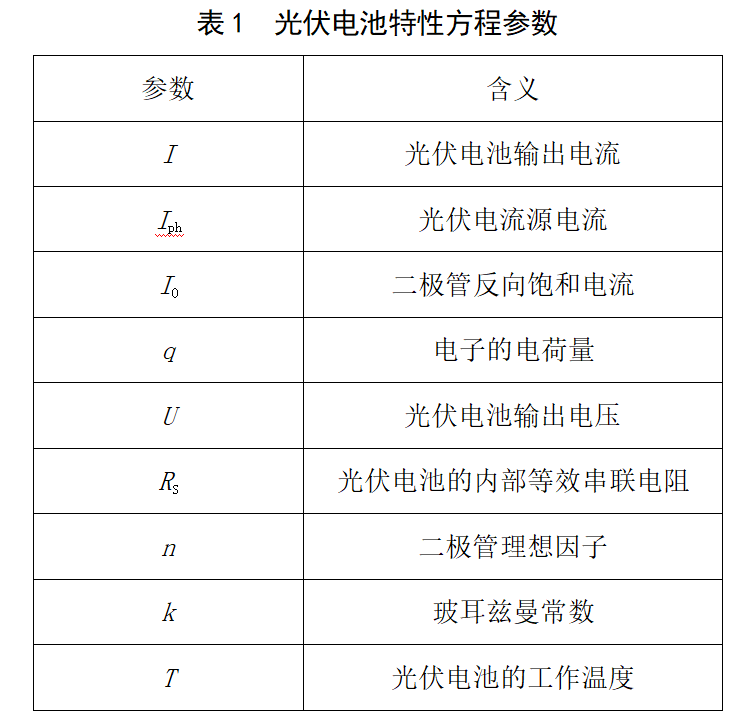
在Matlab软件中可知在温度为25 ℃,光照强度为1 000 W/m2,Uoc=36.3 V,Isc=7.84 A,RS=0.39 Ω,根据以上参数可以确定光伏电池的输出电压与输出电流的关系以及输出功率与输出电压的关系。图2为光伏电池I—U特性曲线,图3为光伏电池P—U特性曲线,由图2、图3可知光伏电池输出特性是非线性的,但其在运行过程中有唯一的最大功率点,所以,采用最大功率点追踪方法来控制光伏电池的最大功率点,有利于提高光伏电池的发电效率。

3传统扰动观察法
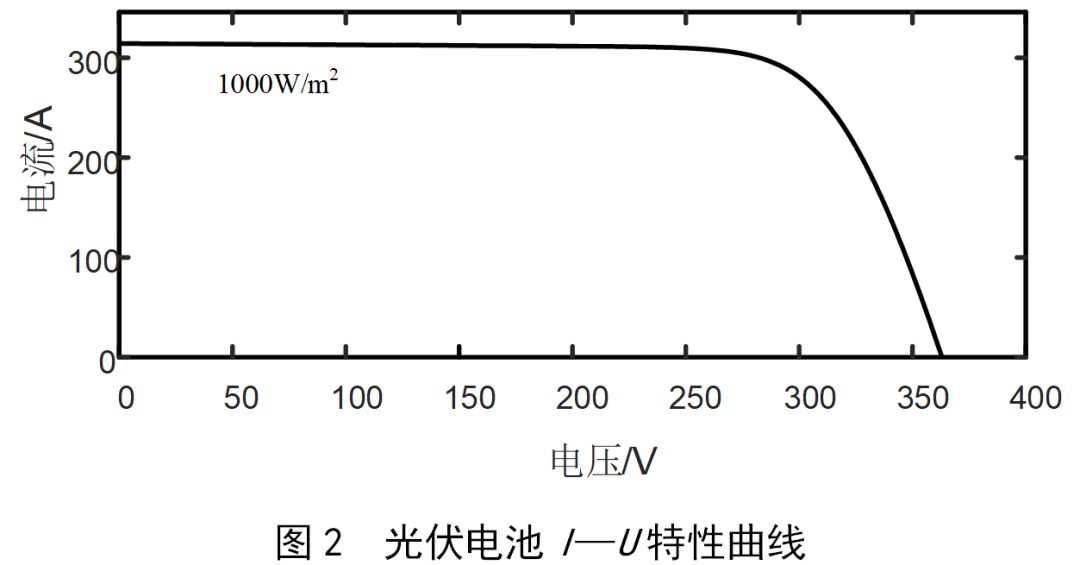
传统扰动观察法,即在一定时间内对光伏电池的功率P和电压V进行实时采样,并给系统一个固定的扰动量ΔV,图4为传统扰动观察法的流程图,当ΔP/ΔV=0时即达到光伏电池的最大功率点;当ΔP/ΔV>0时,说明此时工作点在最大功率点的左侧,需要升高电压;反之,ΔP/ΔV<0时,说明此时工作点在最大功率点的右侧,需要减小电压。
传统扰动观察法有控制简单、容易实现等优点,但是,扰动步长的选取直接影响追踪的效果,选取大步长时,追踪速度快,但振荡明显,幅度较大;选取小步长时,振荡幅度较小,但追踪速度缓慢[8]。所以,步长的选取非常关键。
4改进的扰动观察法
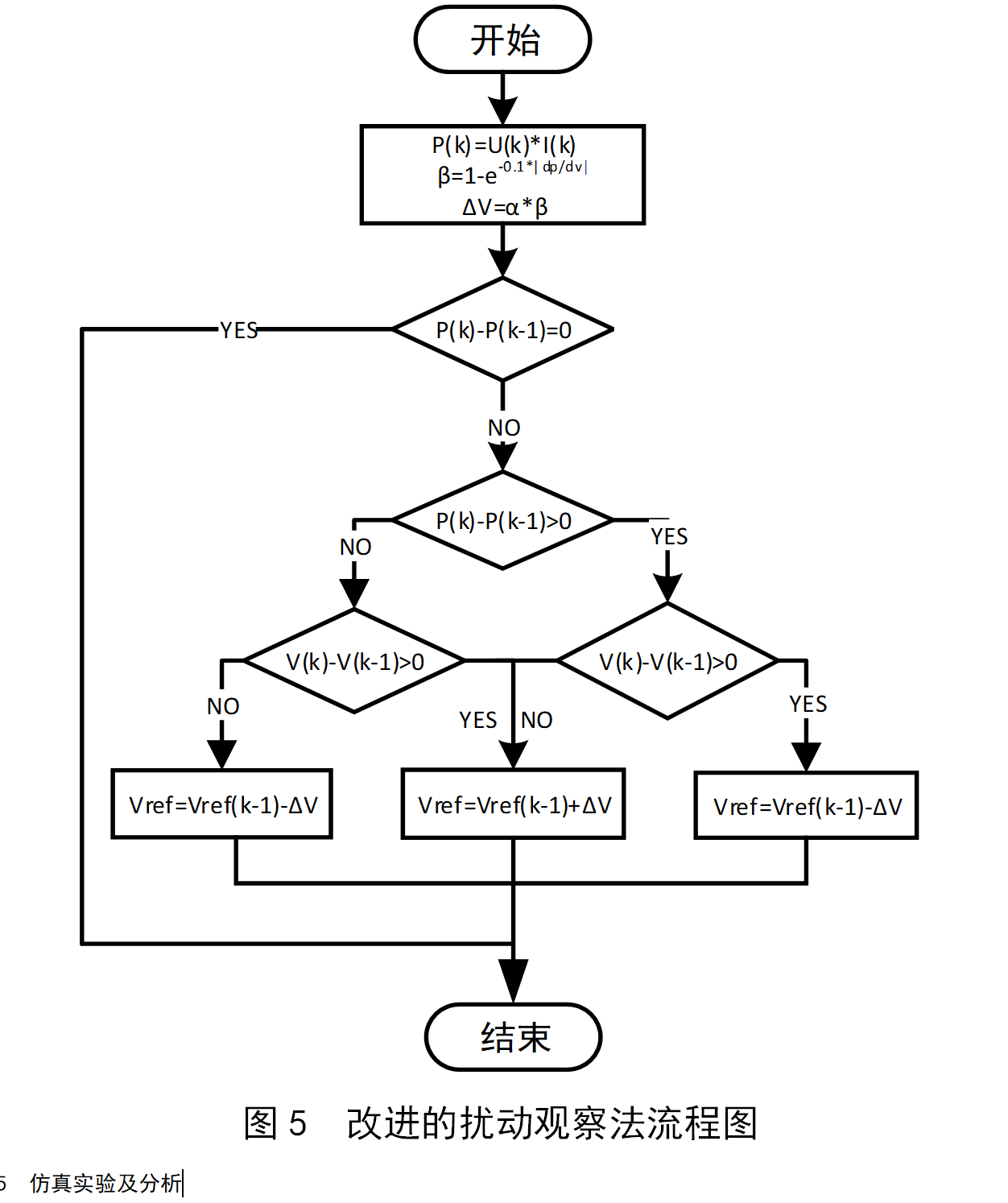
传统的扰动观察法通常全程采取固定的扰动步长来保持追踪最大功率点的运行状态,无法同时兼顾追踪速度和运行状态的稳定性。本文提出的改进的扰动观察法,采取非固定的扰动步长来兼顾最大功率点追踪的速度与稳定性,具体是当光伏系统启动时采取大步长进行扰动以提高最大功率点的追踪速度,当临近追踪目标时采取小步长以减小系统振荡幅度,提高系统的稳定性。由图3可知,光伏电池P—U特性曲线的斜率不断变化,即dP/dV在时刻变化,|dP/dV|值越小,系统的工作点越接近最大功率点;|dP/dV|值等于0,系统的工作点在最大功率点处。根据这一特性,将|dP/dV|作为步长的调整系数。取ΔV=α×β,α取值为0.1,图5为改进的扰动观察法的流程图。
5仿真实验及分析
采用Matlab/Simulink进行模型搭建以验证改进的控制策略的可行性。将光伏电池分别接入编写传统扰动观察法和改进的扰动观察法的S-Function模块中,采用PI调节器对系统的输出电流进行精准控制,保证其稳定性。其中子系统是PWM模块,是能够按照一定规则调制各脉冲宽度进而改变占空比的脉宽调制器。系统在光照强度为1 000 W/m2、温度为25 ℃的条件下运行0.5 s,最终得到两种方法的输出功率曲线图,再进行对比分析。
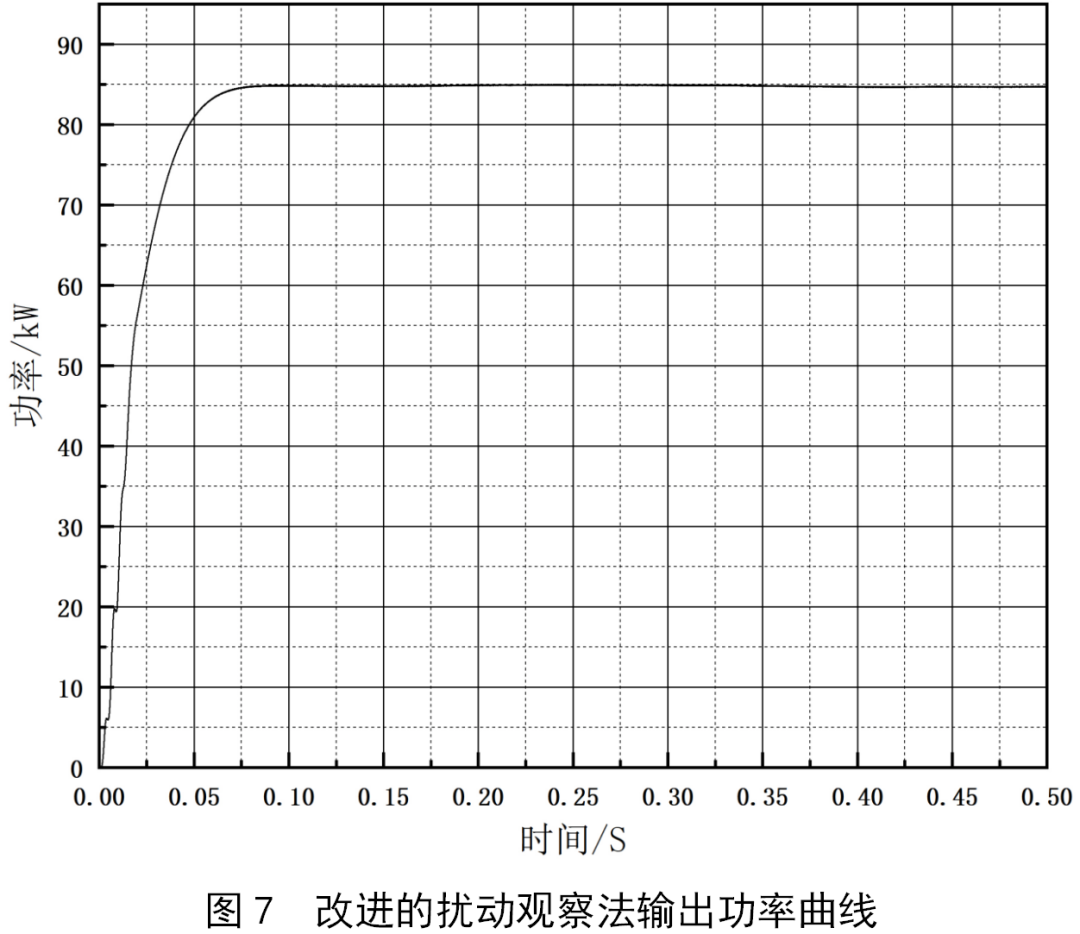
图6、图7为传统扰动观察法与改进的扰动观察法的输出功率曲线图,二者均在0.05 s左右达到最大功率点,但传统扰动观察法振荡明显,改进的控制策略在保证追踪速度的同时大大提高了系统的稳定性,能够兼顾光伏系统运行的速度与稳定性。
![]()
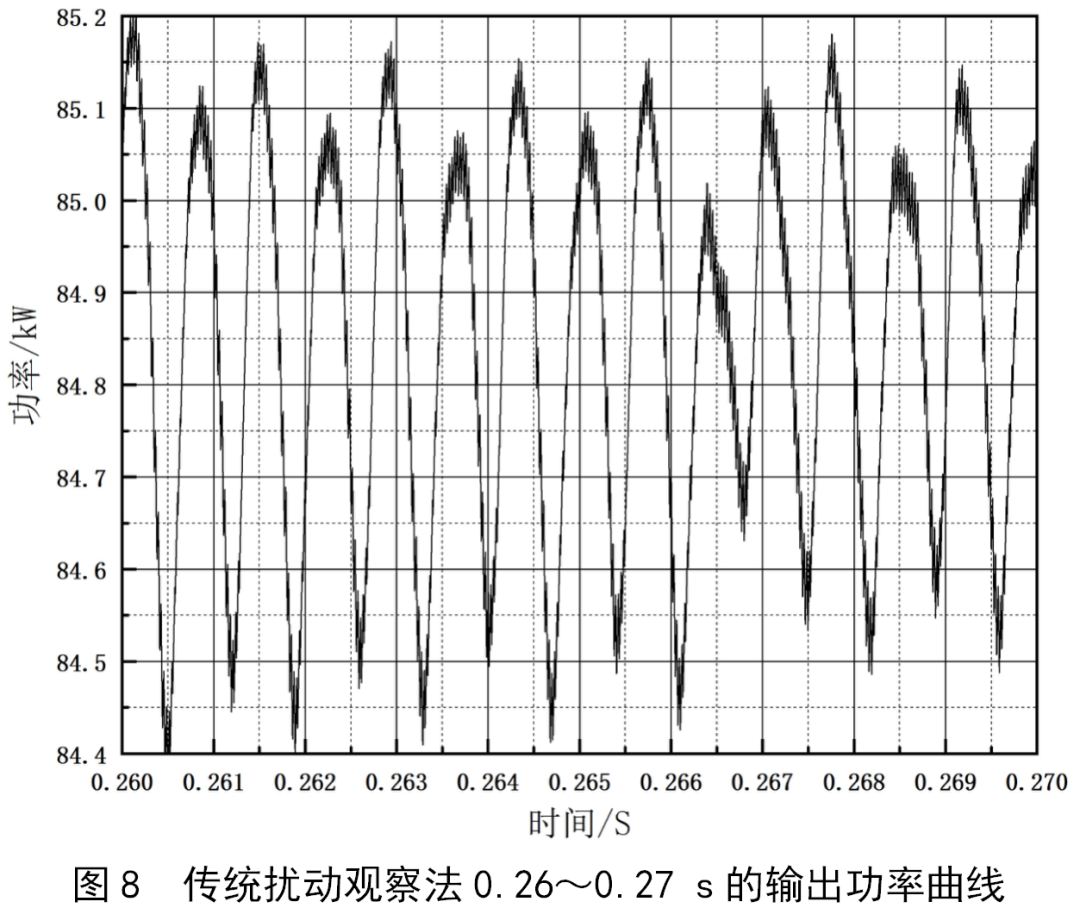
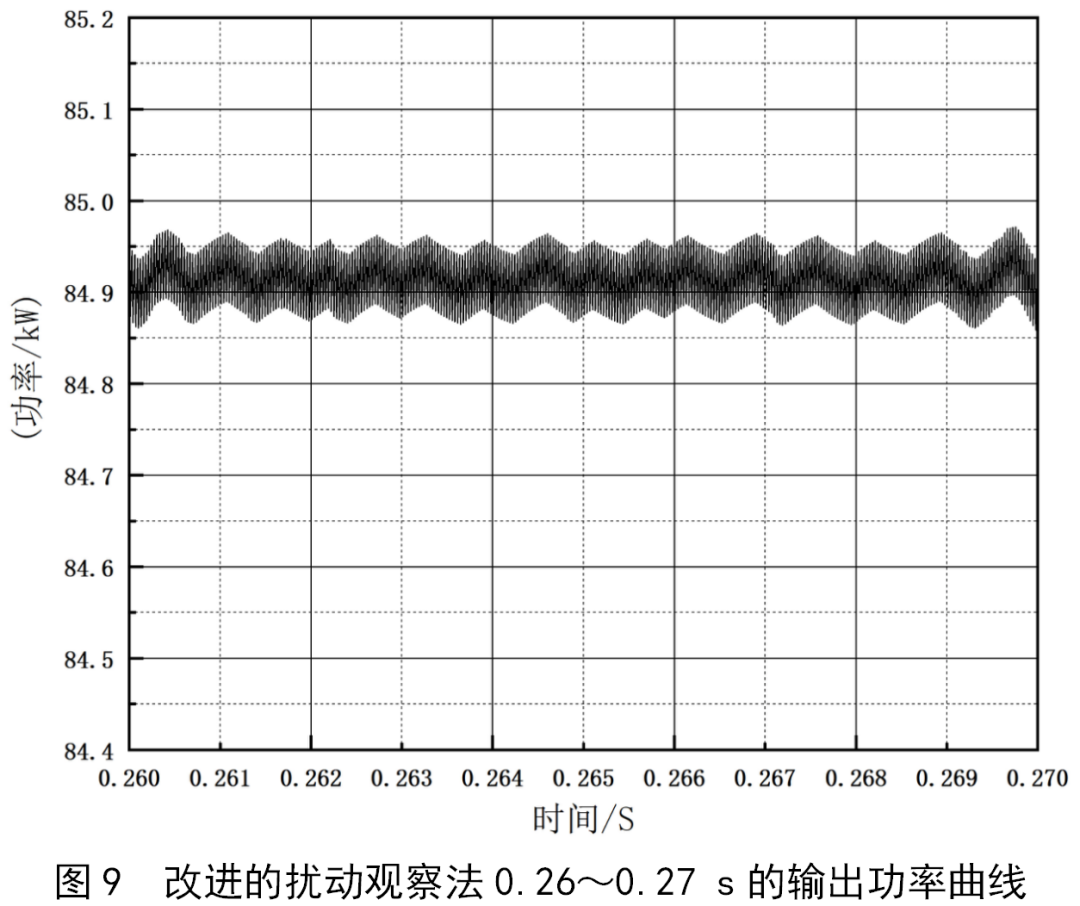
另外,对传统的扰动观察法和改进的扰动观察法的输出功率曲线图截取0.26~0.27 s、功率范围为84.4~85.2 kW的部分进行对比,如图8、图9所示。从图8中可以看出,当系统达到最大功率点时,传统的扰动观察振荡很大,导致能量损耗严重;如图9所示,改进的扰动观察法显著减小了振荡幅度,避免了过多的能量损失。
6结论
本文针对传统扰动观察法的不足,提出了一种改进的扰动观察法,在分析光伏电池的模型和输出特性的基础上,通过Matlab/Simulink进行建模与仿真,对仿真结果进行分析得出,本文提出的改进的扰动观察法能够兼顾追踪速度和系统运行的稳定性,有效减少能量损失,提高发电量。
审核编辑:汤梓红
-
光伏并网中的MPPT算法(最大功率点跟踪)2017-01-06 0
-
labview研究太阳能电池MPPT最大功率追踪算法2018-11-26 0
-
基于BOOST电路的光伏阵列最大功率点跟踪仿真研究2018-12-07 0
-
光伏逆变器扰动观察法的PSIM仿真模型2019-08-28 0
-
2021年光伏电simulink仿真模型+MPPT+并网系统设计 资源2021-05-19 0
-
两级式单相光伏发电系统双闭环控制设计仿真 精选资料推荐2021-07-09 0
-
基于MATLAB的光伏发电研究及其仿真 精选资料分享2021-07-30 0
-
基于Simulink的光伏单相并网控制仿真说明2023-04-06 0
-
遗传算法和扰动观察法实现的MPPT算法2010-05-17 7426
-
基于SVM改进扰动法的MPPT研究2015-11-10 506
-
基于变步长扰动观察法的MPPT研究与仿真_肖恩恺2017-01-08 605
-
基于变步长扰动观察法的MPPT仿真分析_郭昆丽2017-01-08 611
-
改进扰动观察法的最大功率点跟踪_刘飞2017-01-08 863
-
扰动观察法和电导量法的算法程序2022-04-24 344
全部0条评论

快来发表一下你的评论吧 !
