

VVAS调用HLS生成的硬件加速器的主要流程
电子说
描述
本篇博客介绍VVAS框架所支持调用的H/W(HLS)内核。H/W内核指的是使用HLS工具生成的在FPGA部分执行的硬件功能模块。
HLS kernel创建
我们以smartcam的预处理作为例子,相关的代码可以在参考链接中找到。xf_pp_pipeline的作用是将输入图像的格式从NV12转换为BGR,再进行减均值和归一化操作。xf_pp_pipeline的实现基于HLS vision library。Vitis视觉库是为在Vitis开发环境中工作而设计的,它为在FPGA设备上加速的计算机视觉功能提供了一个软件接口。Vitis视觉库的功能大多与OpenCV的功能相似。更多的详细说明可以在参考链接中找到。
#include "xf_pp_pipeline_config.h"
void pp_pipeline_accel(ap_uint* img_inp_y, // Y Input image pointer
ap_uint* img_inp_uv, // UV Input image pointer
ap_uint* img_out, // output image pointer
float params[2 * XF_CHANNELS(IN_TYPE, NPC)],
int in_img_width,
int in_img_height,
int in_img_linestride,
int out_img_width, // Final Output image width
int out_img_height, // Final Output image height
int out_img_linestride) { // Final Output image line stride
#pragma HLS INTERFACE m_axi port=img_inp_y offset=slave bundle=gmem1
#pragma HLS INTERFACE m_axi port=img_inp_uv offset=slave bundle=gmem2
#pragma HLS INTERFACE m_axi port=img_out offset=slave bundle=gmem3
#pragma HLS INTERFACE m_axi port=params offset=slave bundle=gmem4
#pragma HLS INTERFACE s_axilite port=in_img_width
#pragma HLS INTERFACE s_axilite port=in_img_height
#pragma HLS INTERFACE s_axilite port=in_img_linestride
#pragma HLS INTERFACE s_axilite port=out_img_width
#pragma HLS INTERFACE s_axilite port=out_img_height
#pragma HLS INTERFACE s_axilite port=out_img_linestride
#pragma HLS INTERFACE s_axilite port=return
......
xf::cv::resize(rgb_mat, resize_out_mat);
xf::cv::preProcess(resize_out_mat, out_mat, params);
......
}
xf_pp_pipeline_accel.cpp作为硬件的一部分,需要将它和platform结合在一起。v++将HLS kernel打包为xo文件用于后续的硬件集成。
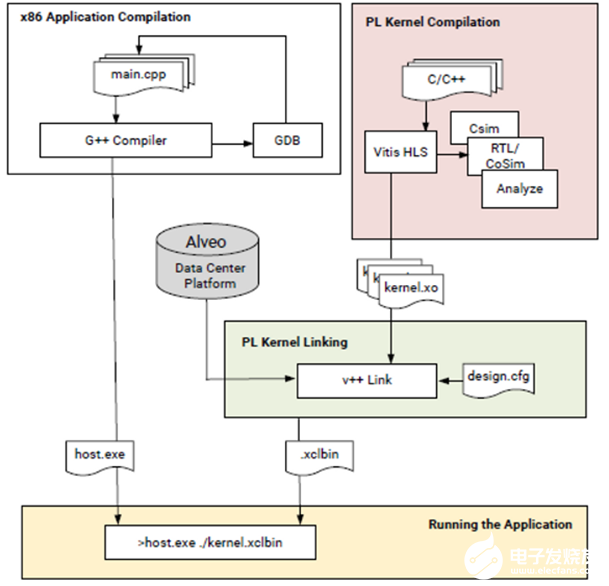
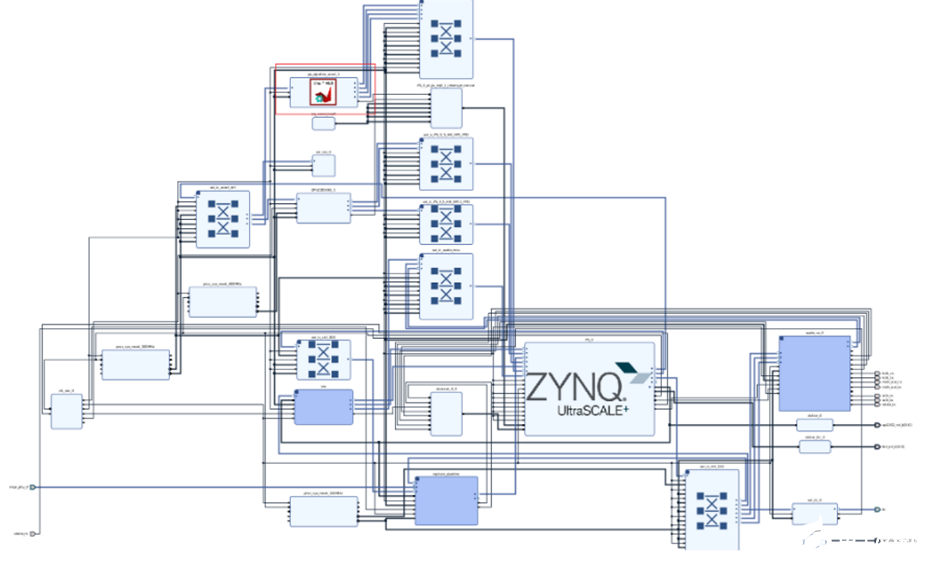
kv260_ispMipiRx_vcu_DP是smartcam应用使用的platform,xf_pp_pipeline.cpp打包成xo对象后,通过v++链接为完整的硬件工程并生成xclbin文件。完整的硬件框图如下图所示,红框部分为对应的HLS kernel。
Kernel调用
使用VVAS框架为xf_pp_pipeline.cpp编写自定义驱动是要实现四个函数,分别是xlnx_kernel_start、xlnx_kernel_done、xlnx_kernel_init、xlnx_kernel_deinit。
xlnx_kernel_init()函数读取json文件中的mean_r、mean_g、mean_b、scale_r、scale_g、scale_b。
int32_t xlnx_kernel_init(IVASKernel *handle){
......
kernel_priv->mean_r = json_number_value(val);
kernel_priv->mean_g = json_number_value(val);
kernel_priv->mean_b = json_number_value(val);
kernel_priv->scale_r = json_number_value(val);
kernel_priv->scale_g = json_number_value(val);
kernel_priv->scale_b = json_number_value(val);
......
}
xlnx_kernel_start()函数为HLS kernel配置参数。
int32_t xlnx_kernel_start(IVASKernel *handle, int start, IVASFrame *input[MAX_NUM_OBJECT], IVASFrame *output[MAX_NUM_OBJECT])
{
......
ivas_register_write(handle, &(input[0]->props.width), sizeof(uint32_t), 0x40); /* In width */
ivas_register_write(handle, &(input[0]->props.height), sizeof(uint32_t), 0x48); /* In height */
ivas_register_write(handle, &(input[0]->props.stride), sizeof(uint32_t), 0x50); /* In stride */
ivas_register_write(handle, &(output[0]->props.width), sizeof(uint32_t), 0x58); /* Out width */
ivas_register_write(handle, &(output[0]->props.height), sizeof(uint32_t), 0x60); /* Out height */
ivas_register_write(handle, &(output[0]->props.width), sizeof(uint32_t), 0x68); /* Out stride */
ivas_register_write(handle, &(input[0]->paddr[0]), sizeof(uint64_t), 0x10); /* Y Input */
ivas_register_write(handle, &(input[0]->paddr[1]), sizeof(uint64_t), 0x1C); /* UV Input */
ivas_register_write(handle, &(output[0]->paddr[0]), sizeof(uint64_t), 0x28); /* Output */
ivas_register_write(handle, &(kernel_priv->params->paddr[0]), sizeof(uint64_t), 0x34); /* Params */
ivas_register_write(handle, &start, sizeof(uint32_t), 0x0); /* start */
......
}
xlnx_kernel_deinit()函数用来释放不需要的句柄。
uint32_t xlnx_kernel_deinit(IVASKernel *handle)
{
ResizeKernelPriv *kernel_priv;
kernel_priv = (ResizeKernelPriv *)handle->kernel_priv;
ivas_free_buffer (handle, kernel_priv->params);
free(kernel_priv);
return 0;
}
xlnx_kernel_done()函数进行超时检测。
int32_t xlnx_kernel_done(IVASKernel *handle)
{
uint32_t val = 0, count = 0;
do {
ivas_register_read(handle, &val, sizeof(uint32_t), 0x0); /* start */
count++;
if (count > 1000000) {
printf("ERROR: kernel done wait TIME OUT !!\n");
return 0;
}
} while (!(0x4 & val));
return 1;
}
通过这四个函数就完成了VVAS自定义插件的设计。在smartcam应用运行时,通过命令行gst-launch-1.0 -v filesrc XXXXXX ! queue ! vvas_xmultisrc kconfig="/opt/xilinx/kv260-smartcam/share/vvas/facedetect/preprocess.json" ! XXXXXX完成插件的调用。
其中preprocess.json的内容为:
{
"xclbin-location":"/lib/firmware/xilinx/kv260-smartcam/kv260-smartcam.xclbin",
"vvas-library-repo": "/opt/xilinx/kv260-smartcam/lib",
"element-mode": "transform",
"kernels": [
{
"kernel-name": "pp_pipeline_accel:{pp_pipeline_accel_1}",
"library-name": "libvvas_xpp.so",
"config": {
"debug_level" : 1,
"mean_r": 123,
"mean_g": 117,
"mean_b": 104,
"scale_r": 1,
"scale_g": 1,
"scale_b": 1
}
}
]
}
本文简要介绍了VVAS调用HLS生成的硬件加速器的主要流程,更多的细节可以参考VVAS手册。
责任编辑:彭菁
-
无法导入硬件加速器2019-02-27 2059
-
H.264解码器中CABAC硬件加速器怎么实现?2021-06-07 1886
-
问下ARM3的硬件加速器只能用verilog写吗?2022-09-30 5479
-
利用硬件加速器提高处理器的性能2017-12-04 1935
-
Veloce仿真环境下的SoC端到端硬件加速器功能验证2018-03-28 4762
-
基于Xilinx FPGA的Memcached硬件加速器的介绍2018-11-27 4650
-
毫米波传感器1443硬件加速器的简单介绍2019-05-08 4802
-
硬件加速器提升下一代SHARC处理器的性能2021-04-23 1034
-
OpenHarmony 分论坛-华秋电子新硬件加速器2021-10-23 2410
-
OpenHarmony Dev-Board-SIG专场:OpenHarmony 新硬件加速器2021-12-28 1971
-
什么是AI加速器 如何确需要AI加速器2022-02-06 6216
-
用于 AI 应用的硬件加速器设计师指南2022-08-19 2759
-
借助硬件加速器开发您的设计2023-01-03 1791
-
VVAS调用HLS生成硬件加速器的主要流程介绍2023-06-26 2089
-
使用VVAS调用HLS生成硬件加速器的主要流程2023-08-04 1963
全部0条评论

快来发表一下你的评论吧 !
