

GNSS原理与应用
电子说
描述
8.3 前端
前端的基本目标是放大天线接收的L波段信号(加上噪声)到一个合适的幅度,经过下变频和数字转换,可以进行数字化处理。图8.4示例了一个高动态范围的模拟前端设计,它能够完成基础目标和更多。通常GNSS接收机的一个前端对应一个L波段载频。
因此多波段GNSS接收机需要多个前端,每一个前端设计的相对简单,对每一个L波段中心频点来说可以适配相同的基本设计来构成接收机设计。每一个前端都有基本一致的组件(例如,带通滤波器和根据中心频点确定的一级本振)。然而设计趋势朝着最大化通用器件的方向发展(例如,使用通用中频和后面所有相关的器件)。其他的设计目标是达到较低的噪声系数和高动态范围。后面会进行描述如何设计前端,包括8.4节的接收信道描述,也包含FDMA信号GLONASS卫星的通用设计。
前端的特点是其增益计划,频率计划,频率下变频方案和数字输出信号的类型。参看图8.4,所有放大器增益和混频器等级的带宽要比滤波器的更宽,从而这些滤波器在带宽Bfe、通带的平坦度和群延迟发挥了主导作用。这些滤波器通过对频带以外频率的衰减确定了阻带的抑制度。前端进一步的特点是它的的性能特性,例如噪声系数和动态范围。这些前端特性在下面开始的功能说明描述。
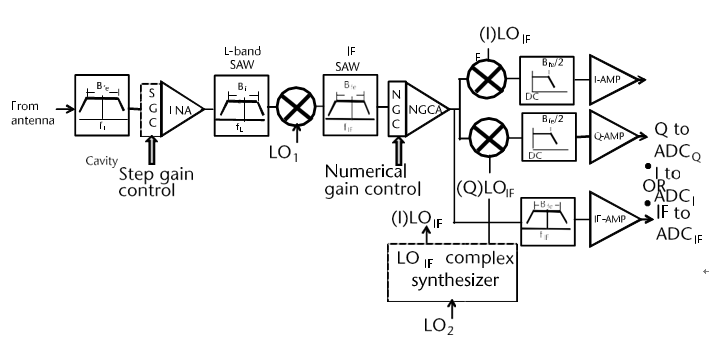
图8.4 高动态范围模拟前端框图。
8.3.1 功能说明
参照图8.4,有一个腔体滤波器(高Q值,低插损,无源L波段带通前置滤波器)在第一级通过最小化带外(尤其是相邻的频带)射频干扰来保护第一级的有源部分。这里通常是非线性的保护电路(未示出),比如背靠背PIN二极管用来钳位超标(损坏)射频信号到地。因为腔体滤波器物理设计偏大,滤波器可能被移动到天线部分装配或重新放置较小前置滤波器,或者对于第一级的有源部分来说阻带抑制满足设计需求,那么可以取消腔体滤波器。
第一级的有源部分是低噪声放大器(LNA),用来放大天线的射频信号。稍后将描述LNA在设置接收机噪声系数中的作用。如果该天线距离接收机比较远,另一个LNA 必须要添加到天线部分起阻带抑制作用的前置滤波器后边。本地LNA的增益必须是相应可调的,但是步进增益控制(SGC)的态范围必须被确定。LNA信号必须通过L波段声表面波带通滤波(SAW)滤波器进行带通滤波,采用第一级本振混频,LO 1 =f L -F if ,fL是我们关注的L波段频率,然后下变频到中频(IF)F if 。频率合成器(频率合成器的实现可以参照图8.1,但后面的图中有更细节的描述)提供所有需要的本振,并且这些本振的相位锁定到基准振荡器。这些频率是基于接收机的频率计划设计的。每一级下变频都需要一级本振。
本振信号混频过程产生两个上部和下部边带的SV 信号(加噪声和泄漏通过信号)。中频SAW带通滤波器选择的下部边带即是输入的L波段信号和LO 1 [即,fL - (fL - fIF )= fIF ]之差。上部边带和泄漏通过信号被这个设计在混频器后面的中频SAW滤波器抑制。在频率计划和SAW滤波器阶段必须专门考虑去除所有潜在的噪声信号源(例如不想要的信号,当第一级本振混频生成的中频结束的地方)。信号的多普勒效应和混频过程产生中频之后的伪码(掩埋在噪声)被保留了下来。只有载波频率变低,但每一颗SV信号的多普勒频移(载波的频率偏差)依然参考原来的L波段信号。中频信号被馈送到数字增益控制放大器(NGCA),通常称为自动增益控制(AGC),但此设计专门使用数字增益控制(NGC)。
数值增益控制(NGC)数字信号到NGCA 在图8.4 功能框图之外,但在后面的图中有更细节的描述。NGC数字信号是离散的并且可以精确地控制NGCA增益,从而避免了模拟控制偏差。这种设计技术演示了一个60dB的动态范围[10] 加后面描述它支持一个干扰情况的特征[10-13]。
参照图8.4,上部中频路径馈送2个混频器,一个同相中频本地振荡器频率,(I)LO if ,一个正交相位本地振荡器频率,(Q)LO if ,转换实际的IF信号为复合的基带同相(I)和正交(Q)分量。混频过程产生的上部边带和泄漏通过信号被他们对应的低通滤波器抑制,也作为抗混叠滤波器,每一个具有前端的一半带宽。如滤波器图所示,这些信号中没有载波频率,因为它们的起源现在是直流电路。滤波后的信号被放大并馈送到两个基带ADC。
在图8.4,下部的路径保持真实的IF ,并通过覆盖前端带宽的抗混叠中频带通滤波器和放大器被传递到ADC。请注意,通常只有一个路径或与其他路径被实际使用。该选择通常依赖于ADC技术,设计师可用与或数字信号处理功率,但下部真实中频路径的实施也有明显的性能优势,后面会进行描述。既然不同的GNSS信号可以有不同的选择,并且开发一个产品的前端需要大量的投资,那么两种方案可能做在一个设计中,提供一个或其他路径可以关闭的方法。
本节叙述了前端部分的结构,其中二次变频有两个方案,一个是IQ两路正交下变频,另一个是传统下变频,前端部分再往后就是ADC。
8.3.2 增益
估计前端电压增益的需求(G fe )db时,可以基于以下条件来计算,(N0)db接收机1Hz带宽热噪声功率,Bfe前端带宽(假定为30MHz),天线负载(假定为50欧姆),和假定2V峰峰值的最大ADC 输入电压。计算顺序和相应的公式在表8.4展示,(N0)db使用的数值在第9章计算,但表中重新计算了,采用了相同的假设(即,接收机噪声系数(N f )dB=2dB和天线温度T ant =100K)。要提取的GNSS 信号被淹没在噪声中,所以假定只有热噪声存在(即,没有带内干扰存在,并且带内和可见GNSS信号增加的功率产生的热噪声可以忽略不计)。假定ADC具有1V的峰值限制,基于一个现代高性能,高采样率,宽带16位ADC(例如参照,[14]),它限制输入电压范围为峰峰值满量程输入2V。所以1V 峰值或0.7071V RMS输入是前提假设。对这些假设来说,表8.4显示最大净前端增益约为110 dB。纯净标准是重要的,因为可能需要更多总增益的要求来克服前端链路插损。要注意,该天线驻波比假定是一个完美的1:1(这不可能的),所以这方面的损失也必须由总增益克服。
对于一个简单的L1C/A码接收机设计,前端带宽会减少到1.7MHz,在这个带宽条件下热噪声被减小到大约-142DBW(即,相对于宽带情况大约降低12 dB) (使用表8.4公式(N)dB (N0)dB – 10log10(1/Bfe),将前端带宽1.7M代入后得-141.9) 。增益增加至大约122dB**(使用表8.4公式** *N * =1010和(G fe )dB =20log10(V ADC /V N ) **,将NDB=-142代入后得121.99)** ,所以宽带的情况下大约需要额外增加12dB的增益。
在任何情况下,所有其他的都一致,实际的增益取决于前端带宽(B fe )下的热噪声。由于一个特定的前端设计带宽不会发生变化,唯一能改变增益的是带内干扰(和组件温度,年龄诸如此类变化引起小的增益变化)。当带内干扰增加,前端增益需要相应降低。表8.4的前端设计能够提供一个很大范围的增益降低。
**表****8.4 **最大净前端电压增益计算
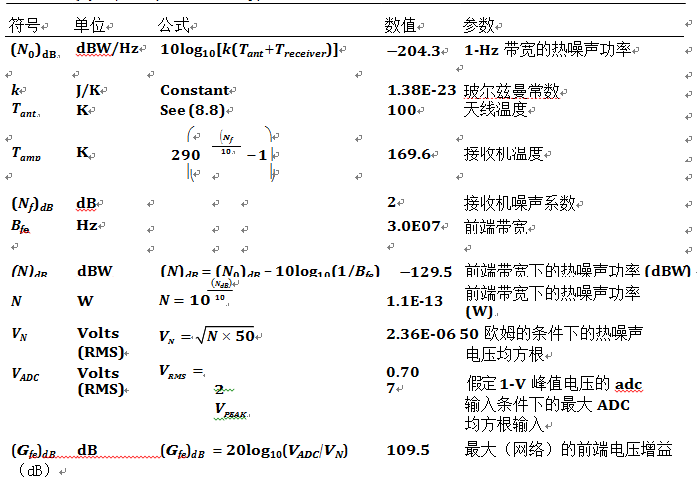
本节叙述了前端电路增益的计算方法,提供了前端电路最大增益的公式 (G fe )dB =20log10(V ADC /V N ),即前端电路后级ADC的最大允许输入电压VADC与前端电路本身热噪声电压的比值,因为GNSS信号被淹没在噪声中,因此这个允许的最大增益并非仅仅是理论上的动态范围最大值,他有实际意义,当然了由于前端电路带宽一定,因此只有带内干扰才是需要降低最大增益的理由。
8.3.3 下变频方案
下变频方案的选择很大程度上取决于设计人员可用的模拟微波技术。单片微波集成电路电路(MMIC)技术和专门的微波部件继续改善,包括降低噪声系数,尺寸和功率。对不需要的传导或者潜在辐射路径来说这些技术也增加了各级之间的隔离度。这有助于减少下变频等级的数量,再模拟信号数字化之前提供更大的通带增益和带外抑制度。自从第一个预校正ADC接收机开始,所有的数字接收机,这些技术进步能够推进技术换代,把下变频等级从三个到两个,到现在只有一级下变频的前端设计。甚至直接L波段数字采样和数字化前端已经推出和落地。即使是直接L波段数字采样和数字化前部已经被提出并派出( 即不进行下变频,ADC直接对LNA后的微波信号进行采样) 。
尽管前面提到的技术优点,由于存在振荡器的不稳定性多级高增益还是要优于直接L波段直接采样技术。然而,仅在L波段通过一个LNA 增益级之后下变频到中频会大大减少泄漏路径反馈。在图8.4所示的设计中,增益分别在两个单独的频率L波段和中频进行,并且大部分的增益放在中频部分。这样设计也允许使用一个相同的,较小的,成本较低,较高Q值和较低插入损耗的中频SAW滤波器,相比使用在L波段的滤波器,为了匹配其相应前端L波段频率,每个SAW一定是不同的。这些中频增益和滤波器级显著提高了整体前端阻带抑制性能。对比采用直接L波段采样,这两个关键特性(增强稳定性和阻带抑制)加上用于不同L波段前端相同中频部件是的主要原因。
本节叙述了前端电路下变频方案的发展,强调了传统两级下变频方案对增强振荡器稳定性和阻带抑制的优势是明显的,要比直接L波段数字采样有优势。
8.3.4 输出ADC
注意图8.4,前端上部信号路径输出到ADC 的是一个复合基带(I 和Q)信号。这个方案同时有优点和缺点。明确的优势是信号频谱已现在从中频迁移到直流,并且带宽减半 (8.3.1节已说过,混频过程产生的上部边带和泄漏通过信号被他们对应的低通滤波器抑制,也作为抗混叠滤波器,每一个具有前端的一半带宽) 。在实践中, GNSS信号的载波具有多普勒频移 (即接收到的GNSS信号与卫星发射的信号频率有一点点偏差,我猜是因为卫星不停滴在移动的原因) ,所以这些偏移依然存在。同样,复合中频下变频(混频)信号具有从参考振荡器继承的一些频率偏差,因此该共模偏移仍然存在。图8.4的真正中频GNSS 信号转换到一个复合信号处理过程中,复合信号不太可能对是一个各底层真实信号的完全复合信号再现。原因在于,参考时钟频偏,不完美的90度模拟信号相移电路,每一个底层信号的多普勒频移。
这种基带设计存在前提是这只是一些小的偏差,但是这些偏差并不能完全消除。另一个缺点是基带信号不能交流耦合,因为基带频谱是直流和模拟直流通路,增益级受限于漂移(即,包含在ADC过程中的直流漂移可能引起模拟偏置问题)。然而,当ADC不能支持真正的模拟中频信号带宽时,这是最初数字接收机方案,因为相同的原因会继续在一些设计中使用。当数字复合基带信号还不完美的情况下,已经开了各种技术来最小化的ADC输入的直流偏置问题。
下面的路径模拟中频(实际)信号不具有DC 偏置问题,原因它通过交流耦合到ADC。典型地,现代单极性ADC 输入需要一个DC 偏置,但该偏置电路不能受限 于有源增益级的漂移(即,偏置电路中需要使用尽量稳定的参考电压和电阻)。
在该下面的路径方案中,每个数字接收器信道执行转换数字化的真实中频信号为复合基带分量。ADC 过程中转换的真实模拟中频信号到数字中频的更详细说明在第8.3.8节介绍,数字接收机处理过程在第8.4章介绍,但采用真实中频信号数字信号处理的优势在这里表述。由于数字中频的底层GNSS信号通过数字化检测和处理,在ADC中搬移中频信号到一个低镜像频率(描述在章节8.3.8)是数字化采样的一个副产品。
关键的副产品是每个数字接收机信道本质上通过在复制伪码校正过程之后复制载波校正过程来从噪声提取一个卫星信号(分离出视野中所有相同载波频率的卫星信号)。这些校正过程既有开环时搜索或闭环时跟踪卫星(描述在章节8.7)。在这里关注的是采用数字载波校正过程的优点和执行在卫星信号(不是所有视野中的)的复合转换,同时数字化复制假定有完美90度相移的IQ载波信号。当该卫星信号被发现或者在数字接收机信道分配的相位锁被锁定,这些复制的信号同样精确的和卫星信号对齐,意味着这些复制信号包含精确的多普勒频移,精确的共模参考振荡器频率和偏移,同样也有精确的镜像中频的载波频率。(在8.3.8节,解释了实际中频信号在频域如何使用ADC欠采样折返到较低的镜像中频。)
上面一段比较复杂,需再对照原文看
由于可以近乎完美实现数字基带复合转换过程,真实的模拟中频信号推荐采用前端输出到ADC,假设这样的ADC 设计可以采用中频作为输入,并且在ADC采样中提供需要的比特率两倍的增加。还有一些数字接收机信道载波校正过程的简化将在后面描述。
本节比对了前端电路的第二级下变频方案的优劣,重点分析了IQ两路正交方案的优缺点,优点主要是减低了对ADC采样率的要求,速度可以降低一半,但方案太理想化,各种偏移漂移造成的误差难以忽略,还是传统方案好点,虽然对ADC采样率要求高。
8.3.5 模数转换ADC,数字增益控制和模拟频率合成功能
ADC功能框图是前端的一部分,在图8.5展示。两个ADC 选项需要由图8.4 中示出在图8.5。图8.4中两种ADC可选方案在图8.5中示例,假如采用复合数字基带信号输出在图的上部分使用了一对基带ADC,假如真实数字中频信号输出实施的话需要需要在图表下部分的一个单独ADC。在任一情况下,除了信号检测是复合或者真实的,实现相同的数字增益控制功能。注意,复合信号ADC的采样时钟是真实信号ADC采样率的一半。这是因为复合信号带宽是真实信号的(大约)。数字增益控制还展示了作为副产品带有J/N表和情景感知的两种ADC实施。
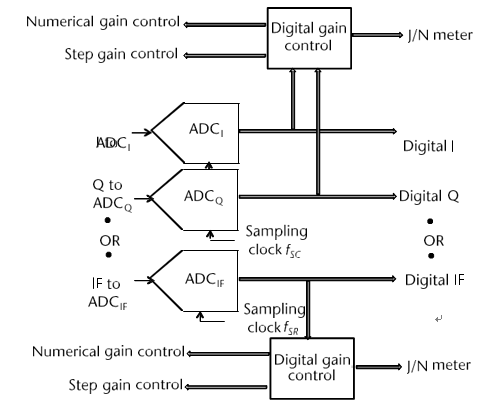
图8.5 具有数字增益控制功能的前端ADC方案。
对真实信号路径来说数字增益控制功能的细节在图8.6的闭环中展示。数字增益控制方案[10]作为其模拟部分的对应具有同样的功能(检测器,低通滤波器,比较器,AGC增益和误差积分器),但这种方案的优点是精确和容易调谐,高动态范围和自由漂移积分,使步进增益控制(及其J/N 表副产品)变得可行。其他情境感知功能,如干扰特性也可以作为数字增益控制设计的一部分实现,但不在这里描述。
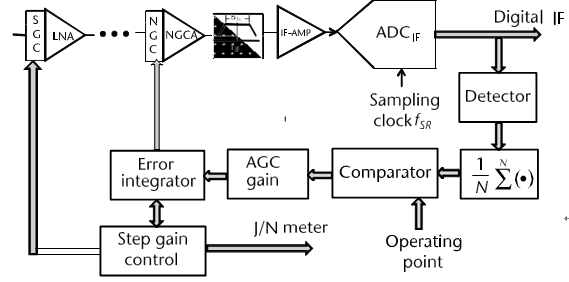
图8.6 闭环中的前端扩展数字增益控制功能。
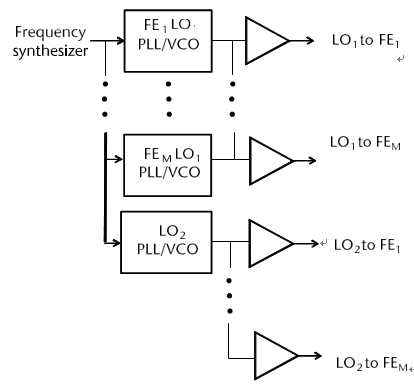
图8.7 前端模拟本振频率合成器。
模拟频率合成器功能框图,服务所有M个前端,见图8.7。它提供了一个唯一的LO1到各前端,从而产生一致的中频。如果一个复杂的基带信号由前端合成,那么该频率合成器提供了一个通用LO2 到每个前端,图8.4中典型的复杂合成器产生2 至4 路的LO IF 。所有合成频率都锁相到参考振荡器。
数字频率合成器(在图8.1比较高的层面)也锁相到参考振荡器,并且提供给所有M个前端提供ADC采样率,也提供定时中断给所有的接收机信道。谨慎的做法是为接收机的模拟和数字电路提供单独的电源调整器,通过提供在电源附近提供单点接地回流使它们免受接地环路的影响,在实践中尽可能保持物理隔离来最小化辐射串扰。尽管每个前端都需要自己的ADC,我们还是通过在功能上将ADC图表与模拟前端分开来进一步强调说明。
本节没有特别之处
8.3.6 ADC实现损耗和一个设计实例
在GNSS接收机中ADC有限的量化级别会引起实现的损耗。这种损耗会在本节中描述,并展示一个快速模拟-数字转换器的设计示例。从历史上看,因为GNSS接收机是实时操作的,所以信号处理也是在时域进行。时域基带处理允许的ADC 位数非常少,因此现在的技术水平现状是简化设计和增加采样率。自从当前的ADC和信号处理技术支持12bit或者更高的ADC分辨率后,搜索引擎中的频域处理已变得非常流行。
当这些ADC 使用后,实现损耗问题成为一个争议点。即使这样,存在实时的技术可以有效执行搜索引擎功能,所以实现损失的问题仍然很重要。
第一代GPS C/A码数字接收机使用1位和2位ADC ,其理论实现损耗分别为1.96 dB和0.5495 dB [16]。( 所谓损耗,我猜是AD转化过程中由于数字位LSB造成不可能准确反映模拟电压值,而理论上至少有一个LSB的转换误差,这个误差便是损耗,如果考虑DNL之类的指标,损耗就不止一个LSB了,所以ADC的位数越多,损耗越小) 理论上,1位ADC 不需要自动增益控制,但实际上有些确保最小和最大幅度的形式是必须的,用来来实现统一的判决性能,通过采用有足够阈值滞后的模拟比较器来避免振荡。现代高性能时域GNSS
接收器仅使用3位或4位ADC。正如看到的那样,采用更多的比特,ADC实现损耗会随之递减,但对ADC中的量化和限幅噪声来说自动增益控制必须调整输入模拟噪声电平均方根(一个西格玛)到最佳( 从后文意思来猜,所谓一个西格玛,应该就是所谓的输入模拟噪声的合成,即均方根.,以后看见西各马就用均方根代替,便于阅读。不相关的多个噪声合成就是对其进行均方根处理即为合成噪声有效值RMS) 。对一个只在时域操作的GNSS接收机来说,选择一个可接受实现损耗的ADC,在宽范围量化等级和模拟输入噪声的一个西格玛幅度优化条件下,[17]提供最全面和准确的结果。由于在分析模型中使用了理想的抗混叠滤波器,因此在[17]中消除了因混叠而导致的实现损耗。仅仅单独基于实现损耗的贡献来考虑ADC选择是有益的,但分析模型中的采样率会由于混叠抑制方面变差,因为不太可能生成一个理想的抗混叠滤波器。ADC设计方面的问题在第8.3.7 节中描述。
多个ADC量化等级对应的有效信号功率损耗(分贝)在图8.8展示。一定的量化等级n,通过打标签与ADC比特位数关联,1比特标签关联n=2,1.5比特标签关联n=3,2比特标签关联n=4,等等在图8.8展示。每个等级绘制为最大阈值和一个西格玛噪声水平比值的函数。
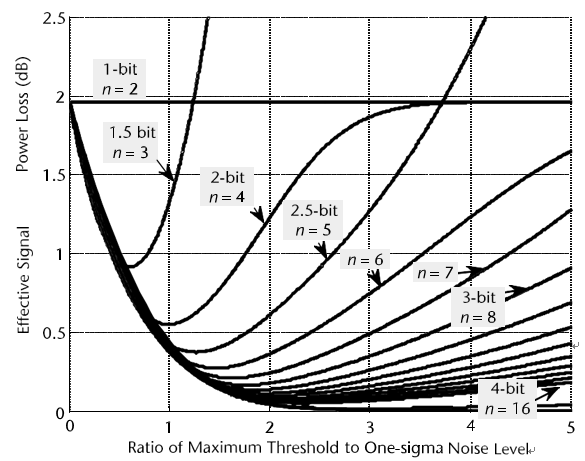
图8.8 几个量化级别的GNSS接收器ADC实现损失。
图8.8的含义大概是这样,纵坐标是转换损失,越往上越高,横坐标是ADC输入峰值点评与RMS噪声电平的比值,输入峰值电平其实也就是参考电压了,从横坐标看,数值越大,说明输入噪声与ADC量程差距越大,噪声占得LSB越少,那么自然转换损耗也就越小了。另外1BIT的ADC其实就是个比较器,所以看上去他跟噪声没啥关系。
最大阈值对应于ADC峰值输入电平(如相对于所述峰-峰输入电平)。表8.5 提供最大阈值到一个西格玛噪声水平的精确比率(表中T的数值),图8.8可以近似得到。该表还包括了没有在图8.8中展示的最优量化级Q,但它是确定表8.5中T的基础。参考[17] 中定义为,,其中n是ADC量化级别的数量(如图8.8 所示)。
最优的峰-峰ADC参考电压V ref ,对一个特定ADC(除了1比特ADC)来说,相对应最优的一个西格玛(RMS)噪声输入在表8.6中展示。表8.5的前三列为了参考方便是重复的。最优的峰值-峰值ADC参考电压列采用计算,Q是采用8.5表中相同n对应值。最优的一个西格玛列采用计算,T采用表8.5中相同n对应的值。
观察图8.8发现,当在这个区域最优比率时(RMS)
,横坐标值为1对应一个西格玛(RMS)噪声水平产生一个ADC限幅噪声 (限幅噪声这个概念不好查到,这句话意思应该是说,横坐标为1,代表VRDF/2/RMS输入噪声=1,即VREF/2与输入噪声相等,而ADC输入电压不应该高于参考电压,那么参考电压就是限幅噪声吧。那么此时西格玛噪声就等于参考电压也即限幅噪声 )。刚好更低的ADC量化级别会有更大的量化噪声,所以当最优实现损耗时限幅噪声会受益 **(看不懂,我理解的量化噪声=RMS噪声,限幅噪声=VREF/2** )。显然,在较低的ADC 量化级别,优化的一个西格玛水平是非常增益敏感的 **(翻译错误,不是优化的,应该是最佳的。这里的增益应该就是横坐标值VREF/2/RMS** )。相反,具有更高量化级别位数的ADC(例如,3 位和更多),对优化的一个西格玛区域来说,实际上几乎没有限幅噪声,几乎很少增益敏感(即,在优化区域曲线是平坦的)。因此,对更高的量化层级,ADC 的参考电压不一定必须到3位小数的最优参考电压,但在峰-峰值ADC的参考电压大约是n*Q。
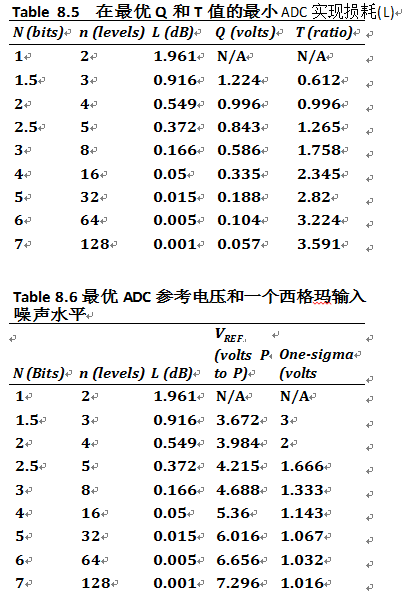
注意的是在表8.5中1位和2位的ADC实施损耗与[16]的一致。还要注意的是,与3位或4位ADC相比,量化级别更高时,实现损耗减少是递减的。
有众多的ADC 设计,每个具有独特的性能优势和劣势。参考文献[18]是一个精彩的(可下载)书籍,提供数据转换所有相关方面的分析,也包括它有趣的历史。并行ADC 设计[19] 对低比特ADC来说是一个流行的选择,因为每个可能的量化层级(除零,这是默认检测)是通过模拟比较器来连续检测,对每一个层级(除零)的离散输出送到数字触发器(例如,对3位ADC,7个模拟比较器馈送7数字触发器)。
图8.9 是一个3位(8级)模拟-数字并行转换器[19]的原理图。模拟输入连接到所有7 个比较器的正极。负极被连接到一串恒流的电阻(来自参考电压)。串中的每个电阻节点为每个比较器的负极提供一个基准电压,该电压比其下方的最低有效位高一个最低有效位(LSB),除了LSB比较器的基准电压为0.5-LSB。
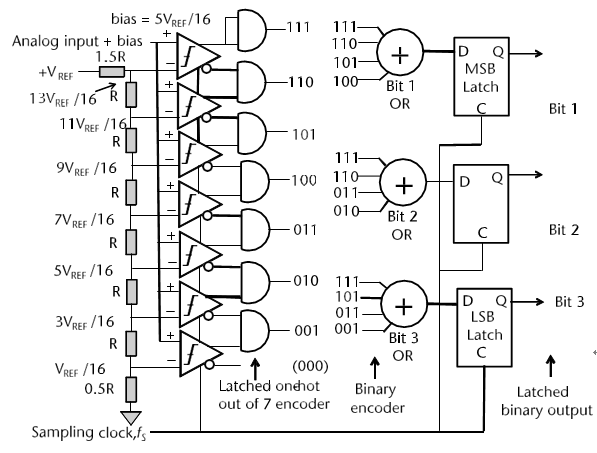
**Figure8.9 **Schematic of 3-bit (8-level) analog-to-digital flashconverter.
比较器串的输出与水银温度计类似(即,当模拟输入电压上升时,1的数量从底部到顶部成比例地上升,一次一个LSB值,当模拟输入电压降低时,0的数量开始离散出现从顶部降至最低。)。然而,因为他们的输出(即,与门只在最高的输入层级产生1的输出)比较器差分输出之间的与门提供了“7个中的1个”。采样时钟会瞬间采样并保存当前的ADC判断,从而允许适当的“7个中的1个”与门(或无)根据当前的模拟输入电平产生1,二进制解码器“或”门将该电平转换为相应的二进制状态作为3个触发器的输入,并且此状态被锁存到触发器中。
每个比较器中都有一个精确且小量的滞后(小于0.5 LSB),以防止其在阈值附近振荡。每个比较器的符号表明判断过程中存在滞后现象。图8.9 清楚地显示了这种二进制转换过程。图8.10显示了该3位模数并行转换器从输入到输出的传递函数(包括滞后),使用单极性VREF = 4V(Q = 0.5V),直流偏置为1.25V来容纳双极性模拟输入。计算最佳一个西格玛ADC输入电平为根2/T=1.138V RMS。从表8.5和8.6可以看出,最佳Q = 0.586V(VREF = 4.688V)和最佳一个西格玛ADC输入电平为1.333-V RMS。此单极性3位ADC最佳直流偏置应为011的比较器参考电压或1.466V(即使用图8.9中所示的偏置方程式)。对于此设计实例的实际选择,实现损耗可忽略不计。
并行ADC设计非常符合ADC的理想要求。(1)理想地模拟信号采样要求零光圈时间,但是实际上采样的时间宽度应足够短,以使模拟信号中出现的最高频率(fc)的幅度变化不到ADC LSB判定电平的一半。(2)采样的模拟信号必须理想地零延迟转换为数字表示,但实际上必须在比采样时钟周期短的时间宽度内转换。(3)采样的模拟信号应立即进行理想的量化,但实际上必须保持误差不超过ADC LSB的一半,直到量化为止。
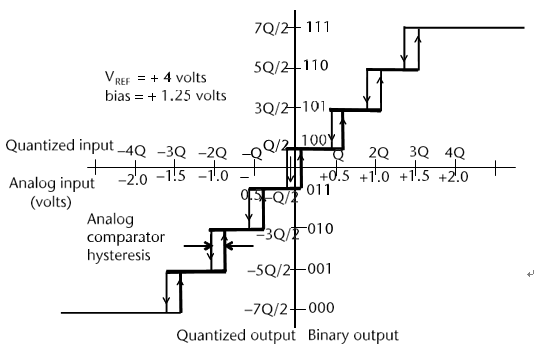
Figure8.10 3****位模数并行转换器输入和输出关系
-
高性能#GNSS模拟 设备#GNSS #GPS #卫星通信 #无线通信 #射频 #微波 #GNSS仿真虹科卫星与无线电通信 2023-03-22
-
基于软件定义架构的GNSS模拟器——GSG-721开箱大揭秘!#GNSS模拟 #GNSS仿真 #导航 #定位虹科卫星与无线电通信 2024-03-14
-
如何依托软件引擎高效完成GNSS仿真?#GNSS仿真 #GNSS模拟 #GNSS #GNSS模拟器虹科卫星与无线电通信 2024-04-11
-
GNSS仿真引擎Skydel软件使用培训课程-先导课 #GNSS模拟 #GNSS仿真 #gnss虹科卫星与无线电通信 2024-05-20
-
GNSS测试行业理论知识助您深入了解GNSS技术的核心知识,掌握最先进的测试方法 #GNSS模拟 #GNSS虹科卫星与无线电通信 2024-08-23
-
Skydel基于NI USRP实现软件定义GNSS信号仿真 #GNSS #GPS #NI #GNSS仿真虹科卫星与无线电通信 2024-09-14
-
计讯物联GNSS位移监测站#GNSS监测站jf_69620166 2025-09-05
-
GNSS波形的最大采样率是多少?2019-04-28 2512
-
揭秘GNSS实验室2019-09-23 3039
-
NovAtel的GNSS/INS SPAN产品2019-09-24 1972
-
基于NEO-M8N GNSS接收器模块的GNSS 5 CLICK板确定当前位置2020-05-21 2540
-
GPS和GNSS的区别2021-07-27 6983
-
GPS和GNSS的区别是什么?2021-10-09 5223
-
什么是GNSS测试?如何进行GNSS测试?2022-10-31 6579
-
GNSS天线的分类 影响GNSS天线的因素2023-11-28 4431
全部0条评论

快来发表一下你的评论吧 !
