

介绍一下AUTOSAR各个软件层之间交互的接口
接口/总线/驱动
描述
AUTOSAR的三类接口
AUTOSAR中有三种类型的接口,分别是:AUTOSAR接口,标准化AUTOSAR接口和标准化接口。
- AUTOSAR接口:用于SWC与SWC之间、SWC与BSW之间交换信息的接口。这类接口独立于特定的编程语言、ECU和网络技术。AUTOSAR接口用来定义SWC之间以及SWC与BSW之间的Port,通过这些Port SWC与SWC、SWC与BSW可以相互通信(发送或接收数据,或调用服务)。无论这些SWC与BSW位于本地ECU,还是位于不同的ECU(通过车载网络),都可以通过AUTOSAR接口实现数据交换。
- 标准化AUTOSAR接口:标准化AUTOSAR接口也是一种AUTOSAR接口,可以看作是AUTOSAR接口的子集。它们的特别之处是这类接口的语法和语义都是被标准化的,用来定义AUTOSAR服务,这些服务是BSW提供给SWC应用软件的标准化服务。
- 标准化接口:一种在AUTOSAR中标准化的API接口,没有使用AUTOSAR接口技术。标准化接口一般是基于特定编程语言的(如C语言),鉴于此,标准化接口往往用于同一个ECU上的软件模块之间的交互。当软件模块通过标准化接口通信,也就无法通过网络将通信路由到别的ECU上的软件模块了。
上面的描述可能有些晦涩难懂,下面这张图可以帮助大家更好地理解这三种接口的用法。
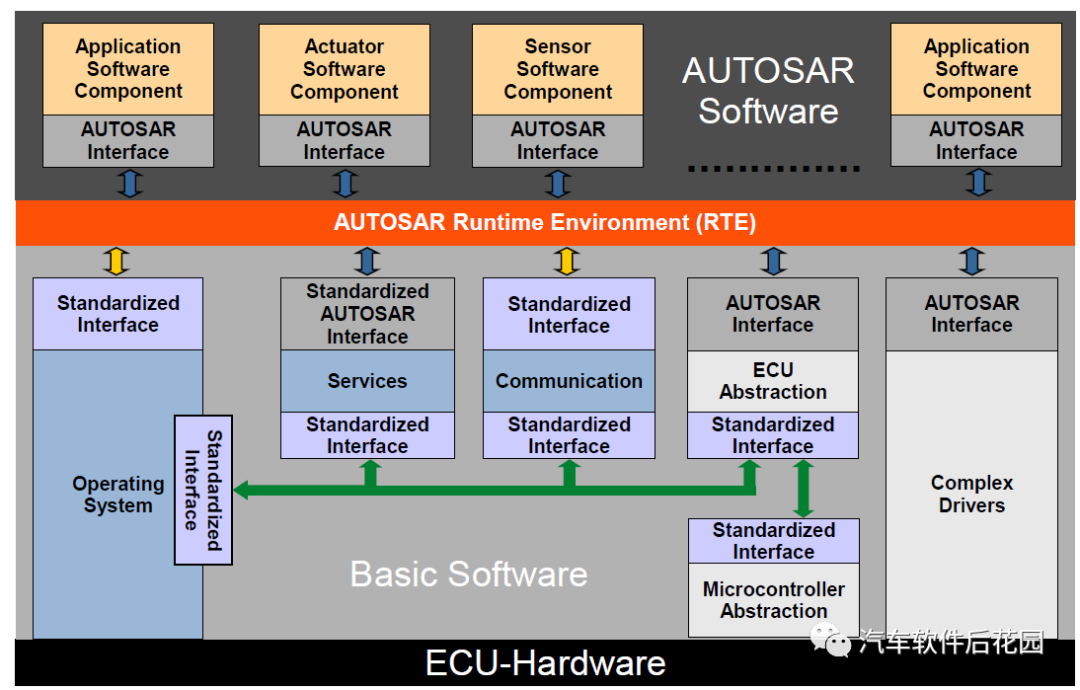
由上面的图可以看出,AUTOSAR接口主要用于应用软件组件(SWC)之间以及应用软件组件与基础软件之间(BSW)的通信。标准化AUTOSAR接口主要用于应用软件组件与基础软件的标准化服务之间的通信。而标准化接口则主要用于不同基础软件模块之间的通信(OS、通信模块可以通过标准化接口与SWC通信)。
AUTOSAR接口的通用规则
从之前的文章我们了解到AUTOSAR定义了不同的软件层级,不同的层级又包含很多软件模块。那么在不同的软件层级以及软件模块之间,如何使用AUTOSAR的三种接口呢,接口使用上有哪些限制呢?让我们通过一张图来了解一下。

这张图乍一看可能会有点一头雾水,我们来看一下这些箭头代表什么意思。

AUTOSAR各层软件之间的交互
下面我们通过一个例子来详细看一下AUTOSAR各个软件层之间是如何交互的,看完这个例子你将会了解:
- 各层软件之间如何交互?
- 软件接口看起来是怎样的?
- ECU抽象层内部是什么?
- 如何高效地实现抽象层?

这个例子将说明NVM manager和WatchDog manager如何在假定的硬件配置下与SPI驱动程序交互。
ECU硬件包含一个外部的EEPROM和一个外部的看门狗,它们通过SPI与MCU连接。
SPIHandlerDriver控制EEPROM及WatchDog对SPI硬件的并发访问,并且使WatchDog对SPI硬件访问的优先级高于EEPROM。
MCU内部包含一个Flash,它和外部EEPROM并行使用。EEPROM抽象层和Flash EEPROM Emulation拥有语义上相同的API。
Memory Abstraction Interface可以通过以下几种方式实现:
- 运行时通过设备索引路由(internal/external)
- 运行时通过Block索引路由(>0x03FF = 外部EEPROM)
- 通过包含函数指针的ROM table在配置期间路由(此时Memory Abstraction Interface只是虚拟存在)

NVM manager通过抽象层来访问Hardware Driver,根据设备索引来区分不同的存储设备。
Memory Abstraction Interface的接口可能像下面这样:
包含设备索引、Block序号和数据缓存指针。
Std_ReturnType MemIf_Write
(
uint8 DeviceIndex,
uint16 BlockNumber,
uint8 *DataBufferPtr
)
而EEPROM抽象层和Flash EEPROM Emulation的接口可能像下面这样:
包含Block序号和数据缓存指针,由于到这一层已经索引到具体的设备了,因此不再需要设备索引了。
Std_ReturnType Ea_Write
(
uint16 BlockNumber,
uint8 *DataBufferPtr
)
NVM设备使用场景
场景一:只使用一种NVM设备类型
这是通常的用法,使用EEPROM或者Flash中的一种NVM设备。这种情况下,Memory Abstraction可以用简单的宏定义实现,该定义忽略设备索引参数。下面的例子展示了写NVM的函数定义:
File MemIf.h:
#include "Ea.h" /* for providing access to the EEPROM Abstraction */
...
#define MemIf_Write(DeviceIndex, BlockNumber, DataBufferPtr) \\
Ea_Write(BlockNumber, DataBufferPtr)
File MemIf.c: 不存在
此种情况没有运行时的额外代码,NVM manager直接访问EEPROM Abstraction 或 Flash emulation。
场景二: 使用两种或以上NVM设备类型
此时必须使用设备索引参数来选择正确的NVM设备。通过使用函数指针数组,同样可以高效地实现。下面的例子展示了写NVM的函数定义:
File MemIf.h:
extern const WriteFctPtrType WriteFctPtr[2];
#define MemIf_Write(DeviceIndex, BlockNumber, DataBufferPtr) \\
WriteFctPtr[DeviceIndex](BlockNumber, DataBufferPtr)
File MemIf.c:
#include “Ea.h“ /* for getting the API function addresses */
#include “Fee.h“ /* for getting the API function addresses */
#include “MemIf.h“ /* for getting the WriteFctPtrType */
const WriteFctPtrType WriteFctPtr[2] = {Ea_Write, Fee_Write};
由上面的例子可以看出:
- 抽象层可以非常高效地实现
- 根据需要,抽象层可以简化
- Memory Abstraction Interface简化了NVM manager 对一个或多个EEPROM和Flash设备的访问。
-
AUTOSAR通信组件介绍 AUTOSAR通信层功能分析2024-12-17 2710
-
AUTOSAR架构下的多核通信介绍2023-11-13 5530
-
AUTOSAR架构MCAL、服务层、ECU抽象层介绍2023-10-27 10258
-
使用Tessy对AUTOSAR应用层软件进行SIL测试2023-07-22 4705
-
介绍一下AUTOSAR各个组件之间用来交换数据的基础2023-07-08 4261
-
AUTOSAR软件架构与开发方法2022-08-22 5224
-
介绍AUTOSAR支持的四种功能安全机制2022-06-10 5774
-
AUTOSAR基础软件层是由哪些部分组成的2022-02-17 1479
-
AUTOSAR 基础软件层2021-12-22 1094
-
搞一下CP AUTOSAR 入门 | 04 CP AUTOSAR EcuM 详解2021-12-07 1576
-
AUTOSAR软件架构概述2021-11-26 1241
-
AUTOSAR应用软件层功能有哪些2021-10-15 2163
-
什么是软件接口_软件系统之间的接口方式2018-01-04 57089
-
请教一下,动态调用时各个VI之间的数据交互是怎么实现的2016-04-20 6011
全部0条评论

快来发表一下你的评论吧 !
