

剑桥大学开发出具有触觉感应功能的新型水凝胶皮肤
描述

几十年来,机器人专家一直致力于研发在外观和功能上都能模仿人类的机器人。近期的技术进步为类人机器人带来了新的前景,例如使用改进的传感器和柔软的人造皮肤。
剑桥大学仿生机器人实验室的研究人员在此方面取得了重要进展,开发出一种基于水凝胶的皮肤,通过使用一系列基于电极的硬件系统和无模型计算方法重建触觉刺激,能够使机器人检测损伤、感知物体或人类的触摸,并监测其周围环境。
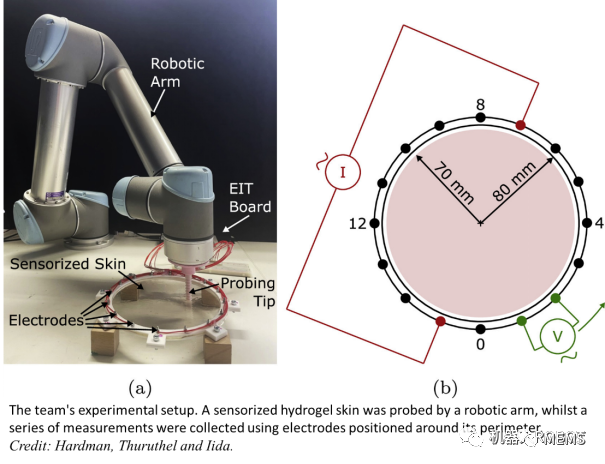
水凝胶是一种不溶于水但含有大量水分的凝胶,具有很好的柔韧性和生物相容性。研究人员利用专门开发的传感水凝胶作为皮肤的基础,将水凝胶材料与电阻抗断层扫描硬件相结合,该硬件使用安装在皮肤边缘的电极施加电流并测量电压,从而提供与皮肤状态有关的信息,推断人造皮肤被触摸的位置,以及是否有受损。
与传统的基于神经网络的人造皮肤系统不同,这种水凝胶皮肤不需要复杂的计算模型来分析电极数据,而是使用少量真实数据的简化方法为基于水凝胶的系统生成变形图。在初步评估中,研究人员发现基于水凝胶的系统明显优于基于传统神经网络的人造皮肤系统,在170毫米的圆形皮肤上实现了12.1毫米的平均分辨率。
目前为止,研究团队对这种新型水凝胶皮肤进行了三项实际应用测试,即损伤检测、环境监测和触觉刺激识别。该系统在所有三个应用中都表现良好,表明它有潜力提高应用于各种任务的软体机器人系统的能力。
研究团队表示,他们目前正在改进皮肤的形状和尺寸,使其能够感知更复杂的刺激。例如,将皮肤应用到机械手上,使它不仅能感知皮肤被触摸的位置和力度,还能感知机械手每个手指的位置以及手是否受损。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
可综合的Verilog语法和语义(剑桥大学,影印)2012-08-06 2636
-
数字通信基础(剑桥大学出版社2008)_英2015-08-17 403
-
剑桥大学新型电池 储电量达锂电池5倍2016-11-21 1035
-
剑桥大学开发出一种可检测水的3D打印显微镜2017-01-13 2332
-
剑桥大学研发出新型藻类燃料电池 效率提升5倍2018-01-11 1390
-
剑桥大学研发成功可以模仿人表情的机器人2018-03-28 5008
-
西安交大研究出一种可注射水凝胶敷料,可用于治疗皮肤损伤2018-09-04 6103
-
剑桥开发出一款可以帮助菜农剥掉生菜最外面烂叶子的机器人2018-09-28 1392
-
剑桥大学研究人员发现了某种活性成分 可用于治疗AML2018-12-23 1956
-
剑桥大学推出一款VR应用 能够识别癌症肿瘤2019-01-03 877
-
剑桥大学设计了一种新型无人机 专为抵御极端北极环境而定制2019-12-06 1089
-
香港城市大学开发出了一种触觉电子皮肤2019-12-10 3843
-
科学家研发可坚持数月的新型水凝胶2021-02-05 2407
-
北京林业大学:研究多功能MXene导电两性离子水凝胶应用于柔性可穿戴传感器阵列2023-05-19 2007
-
用于可穿戴无人机控制系统的仿生多功能水凝胶基电子皮肤2023-08-21 2594
全部0条评论

快来发表一下你的评论吧 !
