

均匀B样条采样从LiDAR数据中快速且鲁棒地估计地平面
描述
摘要
本文提出了一种从自动驾驶车辆的LiDAR测量数据中中快速且鲁棒地估计地面表面的方法。地面表面被建模为一个均匀B样条,该样条对不同的测量密度具有鲁棒性,并且通过一个单一参数来控制平滑性先验。我们将估计过程建模为一个鲁棒最小二乘优化问题,可以重新表述为一个线性问题,从而可以高效地解决。使用SemanticKITTI数据集进行了定量评估,通过将点级语义注释分类为地面点和非地面点。最后在真实场景中验证了该方法在我们的研究车辆上的效果。
主要内容
文章采用了统一的B样条(Uniform B-Splines)来建模地面表面,这种方法对于不同的测量密度具有鲁棒性,并且通过控制平滑度先验的单个参数来调整模型的平滑性。将地面估计过程建模为一个鲁棒的最小二乘优化问题,并通过重新构造为线性问题来高效地解决。利用SemanticKITTI数据集进行了定量评估,通过将点级语义注释分类为地面点和非地面点来验证了方法的效果。最后,他们在实际场景中的研究车辆上进行了验证。此外,文章还介绍了图1中的实验结果。通过提取每个网格单元中的最大观测反射高度,可以构建一个组合高度图,该高度图显示了地面表面的估计结果。
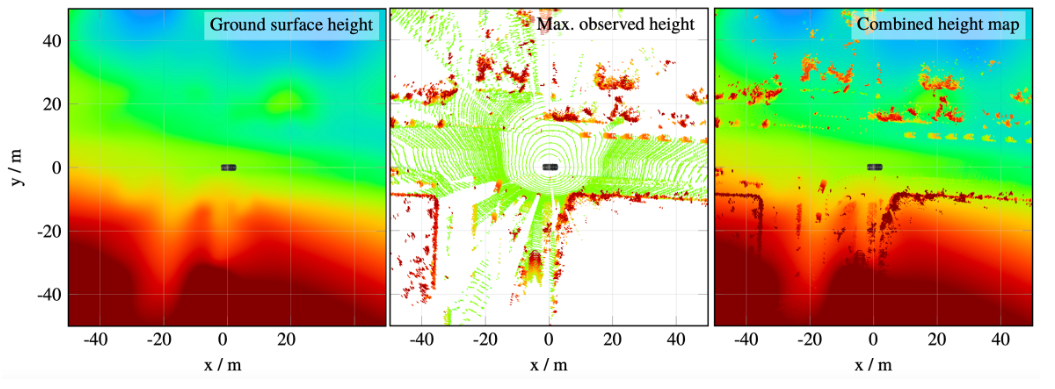
图1:估计的地面表面(顶部)是所提出方法的结果。在随后的处理步骤中,我们可以使用每个网格单元中观测到的最大反射高度(中间)来构建一个组合高度图(底部)。白色/蓝色/红色:无/低/高数值。
主要步骤如下:
1. 统一B样条建模:详细介绍了统一B样条的数学原理和拟合过程,,统一B样条具有局部支持,因此能够更好地适应测量点的分布,文章还讨论了如何选择合适的B样条控制点和阶数。
2. 平滑性约束:为了减少过拟合和噪声的影响,文章引入了平滑性约束,以控制地面估计的光滑度。通过引入正则化项,将平滑性约束融入到优化问题中。
3. 鲁棒优化:将地面估计问题建模为鲁棒最小二乘优化问题,以提高对离群值的鲁棒性。文章详细介绍了鲁棒优化的数学原理和求解方法,并讨论了权重函数的选择。
实验与分析
文章在SemanticKITTI数据集的训练集上进行评估,将所有的测量范围分为地面、非地面和不关心的类别,具体总结在表格I中。

A. 不同地面模型的比较
首先比较了在仅使用地面点进行估计(无异常点的情况下)时不同地面模型的准确性。在这里将我们的UBS模型与三次多项式、估计和预校准的地面平面进行比较。随机抽样了所有地面点的10%用于验证,也就是说这些点在优化过程中没有使用。然后,我们比较所有验证点与模型估计的地面高度之间的绝对高度误差。图3显示了平均绝对高度误差和随着测量距离变化的平均误差。总体而言,UBS模型具有最低的误差。与多项式模型相比,随着测量距离的增加,误差仅略微增加,因为对UBS模型的测量的影响仅局限于局部区域,因此几乎不受局部变化的测量密度的影响。
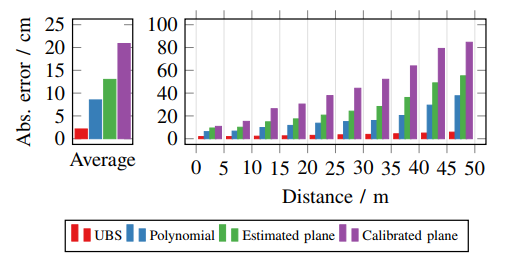
图3:当仅使用地面点进行优化时,不同地面模型的绝对地面点误差。左图:所有验证点的平均值。右图:在距离传感器5米范围内的距离间隔内的平均值。
B. 不同鲁棒性方法的比较
a) 异常值噪声估计:为了证明使用鲁棒优化方法的合理性,我们首先旨在估计非地面点的地面距离分布,即异常值噪声。为了估计异常值噪声,我们仅基于标记的地面点计算地面曲面,并计算估计地面高度与非地面点之间的误差的直方图,如图4所示。
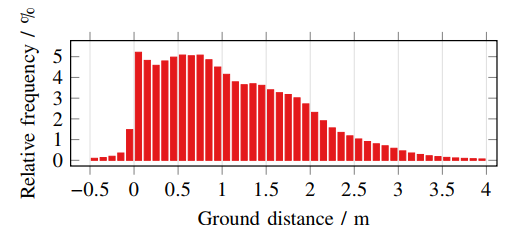
图4:非地面点的地面距离直方图。
我们从直方图中观察到非地面点存在严重偏差,均值为1.09米,并且高度范围较大,从估计曲面以下到约4米。请注意,负的地面距离可能是由于控制点距离为2米和平滑度权重为1造成的,一方面可以减少对内点的过拟合,但另一方面会增加对地面曲面突变的平滑。
图5比较了不同鲁棒性方法在两种设置下对优化的影响。一方面,我们展示了仅使用地面点时的影响,另一方面是当所有点都用于优化时的影响。在两个实验中,我们保留了10%的地面点进行验证。我们观察到TLS方法在存在异常值时产生了最佳结果。TLS方法的最佳误差阈值似乎在20厘米到60厘米的范围内。GMC方法并不总是比普通的最小二乘(OLS)基准方法产生更好的结果。这可能是因为GMC方法在5次迭代内无法收敛。

图5:仅使用标记的地面点进行优化时,估计地面曲面与地面验证点之间的绝对高度误差(上图),以及包括所有点进行优化时的误差(下图)。左侧:所有验证点的平均值。右侧:在距离传感器的5米间隔内进行平均。
C 实验车辆
实验车辆是一辆梅赛德斯-奔驰E级豪华轿车,如图8所示,车顶装有四个Velodyne VLP16激光雷达,车顶中心装有一个Velodyne VLS128激光雷达,前标牌下方还装有一个Ibeo LUX4L激光雷达。
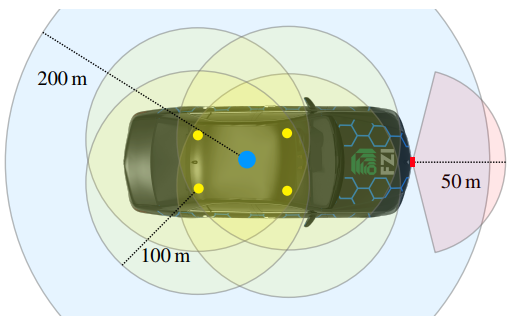
图8:实验车辆上的传感器设置俯视图。非按比例缩放。黄色:VLP16,蓝色:VLS128,红色:LUX4L。
图9总结了根据控制点在一个150 m×100 m的区域内的计算速率。例如,如果地面表面估计应该以至少10 Hz的速率处理测量数据,则控制点的数量应小于3750个,或者换句话说,在这个区域内的控制点距离应至少为2 m。
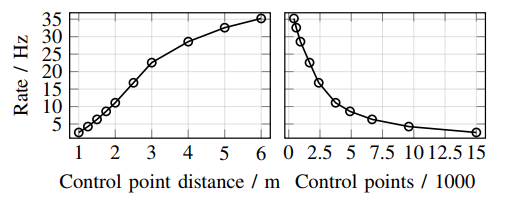
图9:实验车辆上的地面表面估计处理速率,取决于在一个150米×100米区域内的控制点数量。
图10显示了实验车辆上所有安装的LiDAR传感器进行全角度扫描的点集,以及在德国卡尔斯鲁厄市行驶过程中估计的地面表面,观察到地面表面可以准确地估计出来,基于得到的地面表面,能够通过应用简单的基于距离的分类器来区分地面和非地面点。
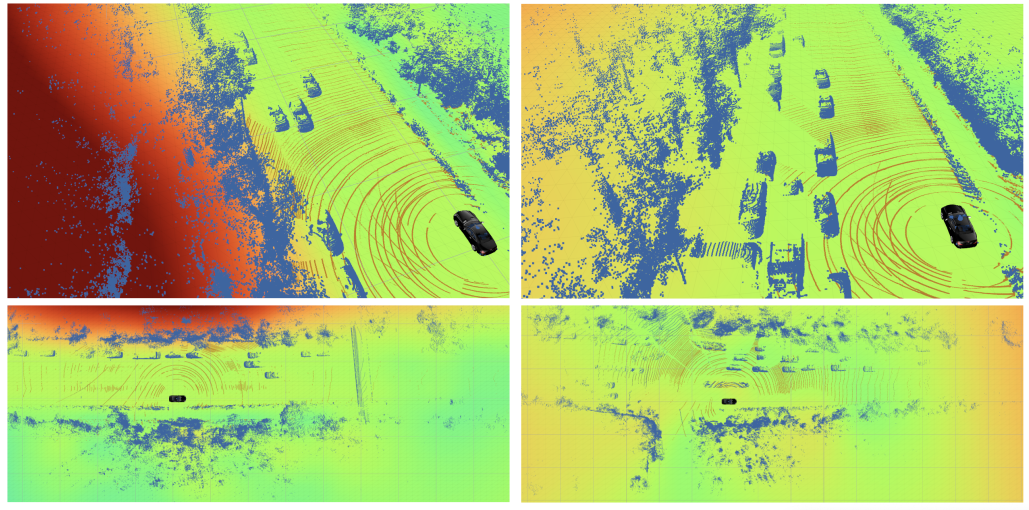
图10:实验车辆上所有LiDAR传感器进行全角度扫描的点集和估计的地面表面。点集按照与地面表面的距离进行着色,棕色表示距离小于10 cm,蓝色表示距离大于10 cm。地面表面按照相对于车辆参考框架的高度进行着色。
总结
本文提出了一种从嘈杂的点集表示的点云数据中估计地面表面的方法,在该方法中将地面表面建模为UBS,UBS隐式地实现了光滑性,并且对局部变化的测量密度不敏感,借助鲁棒优化技术和UBS表面模型,能够在广泛的距离范围内准确估计地面表面,利用这个地面表面估计,我们能够区分地面和障碍物表面的反射,从而可以相对于地面表面对交通场景进行建模。
-
电源/地平面对的模型2011-11-10 2764
-
接地平面(转载)(不针对PCB板天线)2014-08-20 5955
-
【高速PCB布线指南3】接地平面漫谈2018-11-01 4681
-
数据鲁棒传输方案2019-09-04 2837
-
一种n次均匀B样条曲线细分算法2009-04-20 841
-
测地B样条曲线的生成2010-03-01 515
-
电源平面与地平面的电容2010-06-12 3986
-
一种新的估计基础矩阵的高精度鲁棒算法2017-01-03 819
-
空间曲线基于内在几何量的均匀采样方法2021-04-22 1161
-
一种空间曲线基于内在几何量的均匀采样方法2021-04-29 1030
-
鲁棒性算法在数据处理中的应用2024-11-11 3263
全部0条评论

快来发表一下你的评论吧 !
