

直流电机,伺服电机和步进电机的区别
电子说
描述
为不同的应用选择合适的电动机取决于一些设计标准,例如位置精度要求,成本,驱动功率的可用性,扭矩和加速度要求。总体而言,直流,伺服和步进电机等电动机最适合不同的应用。但是,步进电机非常适合于高保持转矩和较低加速度的应用。许多人误解为直流电机,伺服电机和步进电机之间存在巨大差异。为了了解这三个电动机之间的区别,本文简要介绍了这三个电动机之间的区别。
直流电机,伺服电机和步进电机之间的区别
在直流电机,伺服电机和步进电机之间进行选择是一项艰巨的任务,包括在众多设计因素之间取得平衡,即成本,速度,转矩,加速度以及驱动电路,在选择最佳方案时都起着至关重要的作用。您的应用的电动机。
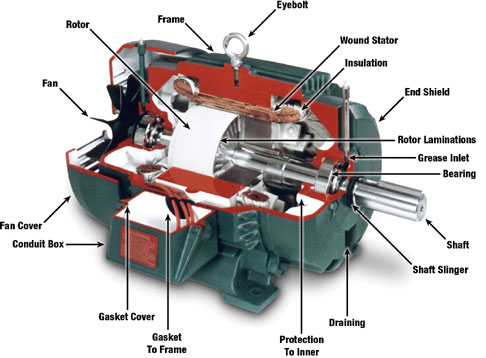
直流电机
直流电机是两线连续旋转电动机,两线分别是电源和地线。接通电源后,直流电机将开始旋转,直到断开电源。大多数直流电机都以每分钟高转数(RPM)运转。计算机中用于冷却的风扇或由收音机控制的车轮。
直流电机
DC电机速度可以通过使用PWM来控制(脉冲宽度调制)技术,快速脉冲电源ON&OFF的技术。循环打开/关闭比率所消耗的时间百分比定义了电动机的速度。
为,例如,如果电源在50%驱动时,则直流电机将在100%的速度的一半旋转。每个脉冲是如此之快,以至于电机似乎不停地旋转,不会动摇!请参考链接以了解有关直流电机工作原理,优缺点的更多信息
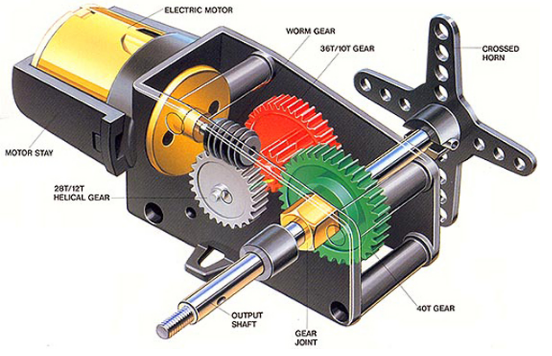
伺服电机
通常,伺服电机是四件事情的结合,即直流电机,控制电路,齿轮传动装置以及电位计(通常是位置传感器)。
与典型的直流电机相比,可以更精确地控制伺服电机的位置,并且通常,它们具有三根电线,例如电源,GND和控制线。这些电机的电源不断地施加,而伺服电机的控制电路会改变功率来驱动伺服电机。这些电机设计用于更精确的任务,在这些任务中,需要精确地确定电机位置,例如在特定范围内移动机械臂或控制船或机器人腿上的舵。
伺服电机
这些电动机不像标准的直流电机那样容易交替使用。位置上的旋转角大约为1800。伺服电机获得一个表示o / p位置的控制信号,并向DC电动机施加动力,直到轴到达由位置传感器确定的精确位置为止。
PWM(脉冲宽度调制)用于控制伺服电机的信号。但是,与直流电机不同的是,正脉冲周期控制着伺服轴的位置,而不是速度。空档脉冲的值取决于伺服机构,将伺服电机的轴保持在中间位置。增加脉冲值将使伺服电机顺时针旋转,而较短的脉冲将使轴逆时针旋转。
伺服控制脉冲通常每20 ms循环一次,从根本上告诉伺服电机去向,即使那意味着保持在相似的位置。当命令伺服系统移动时,即使外力对其施加压力,它也会移动到该位置并保持该位置。伺服电机会避免从该位置移开,以伺服电机可以使用的最大阻力作为该伺服电机的扭矩额定值。请参考链接以了解更多有关伺服电机工作,优缺点的信息。
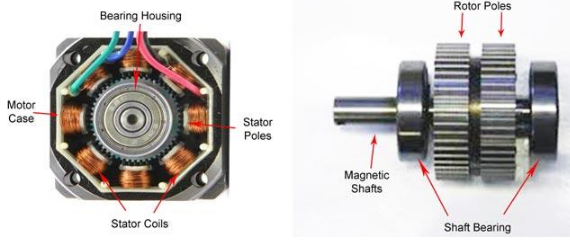
步进马达
步进电机从根本上说是一种使用不同的电动化方法的伺服电机。在电动机包括连续旋转直流电机和组合控制器电路的情况下,步进电机利用围绕中央设备布置的多个凹口电磁体来描述位置。
步进电机需要一个外部控制电路来分别为每个电磁体通电,并使电机轴导通。当电磁铁由动力驱动时,它会吸引设备的齿并支撑它们,与下一个电磁铁“ B”略有偏移。当关闭“ A”并且打开“ B”时,设备将略微旋转以与“ B”对齐,并且在圆圈的每个位置,设备周围的每个电磁体依次通电和断电以进行旋转。从一个电磁体到另一个电磁体的每次旋转都称为“步进”,因此可以通过精确的预定义步进角,在整整3600次旋转中激活电动机。
步进电机
这些电动机有两种类型,即单极/双极。双极电动机是最坚固的电动机,通常有4或8根引线。它们内部有两个电磁线圈阵列,并且通过改变线圈中的电流方向来实现步进。通过识别5线,6线甚至8线的单极电动机,也可以使用2线圈,但是每一个都有一个中心抽头。这些电机可以步进,而不必使线圈中的电流方向相反,从而简化了电子设备。但是,由于该抽头用于一次仅增强每个线圈的一半,因此它们通常比双极线圈具有较小的扭矩。
步进电机的设计可以提供恒定的保持转矩,而无需激活电机,只要在极限范围内使用电机,就不会发生放置错误,因为这些电机都是预先定义好的情况。了解有关步进电机工作原理,优缺点的更多信息
直流,伺服和步进电机的优缺点
直流电机,伺服电机和步进电机的优缺点包括以下内容。
直流电机是快速连续旋转电动机,主要用于需要以每分钟高旋转速度(RPM)旋转的任何物体。例如; 车轮,风扇等
伺服电机在有限的角度下具有高扭矩,快速,准确的旋转。通常,这是步进电机的高性能替代产品,但使用PWM调整则设置更为复杂。适用于机械臂/腿或方向舵控制等。
步进电机速度慢,易于设置,精确旋转和控制–在位置控制方面优于伺服电机等其他电机。在这些电动机需要反馈机构和辅助电路来驱动定位的情况下,该电动机可通过分数加法通过其旋转特性进行位置控制。适用于位置至关重要的3D打印机和相关设备。
-
无刷直流电机和有刷直流电机的区别2023-03-17 10403
-
直流电机/伺服电机/步进电机介绍2023-03-09 727
-
无刷直流电机与有刷直流电机的区别2023-03-08 2711
-
无刷直流电机和步进电机区别2023-03-01 8743
-
直流电机和步进电机的区别在哪2022-03-01 2526
-
直流电机,伺服电机和步进电机之间有什么区别?2021-09-26 1963
-
直流电机与步进电机的区别在哪2021-09-01 3773
-
直流电机与交流电机的区别2021-08-03 20838
-
直流电机和交流电机的区别2021-07-16 92241
-
直流电机和步进电机 精选资料下载2021-07-08 1053
-
直流电机与步进电机区别2021-06-28 2475
-
直流电机和步进电机的区别2018-11-26 92865
-
电机的种类分类,交流电机、直流电机、伺服电机、步进电机的区别介绍2017-06-09 26731
全部0条评论

快来发表一下你的评论吧 !
