

伺服驱动器与运动控制器之间的区别是什么?
工业控制
描述
在自动化领域,运动控制器和基本的伺服驱动器之间存在着微妙的差异。许多应用都需要运动控制器和伺服驱动器共同组成一个完整的系统,因此,掌握每个设备的功能和智能水平至关重要。
伺服系统
伺服驱动器向电机线圈供应电压和电流,然后通过监控反馈来关闭伺服环路,从而为伺服电机供电。大多数情况下,伺服驱动器含有三个嵌入式伺服环路,即电流(或扭矩)环、速度环和位置环;三个环路相互作用以实现精准的运动控制。需要哪些环路是由预期的电机操作来决定的。
扭矩控制应用仅需要电流环就可以实现特定要求的扭矩。由于扭矩和电流成正比,扭矩可通过向伺服驱动器提供电流反馈的传感器进行调节。
在速度控制应用中,电流环和速度环通常都需要。速度环负责监控向伺服驱动器提供速度信息的传感器,并根据所得数据调节电流环,增大或减小扭矩。
最后,位置环应用利用与电机连接的反馈传感器,将位置信息发送至伺服驱动器或运动控制器,后者又将信号发送至速度环,从而增大或减小速度,然后再将信息传递给电流环以实现扭矩调节。
定义驱动器和控制器角色
在无刷直流伺服电机的扭矩控制应用中,“设备”根据基于电流反馈测量的命令输入向电机提供电流和电压。用专业术语来说,向电机供电的设备称为伺服放大器或伺服驱动器。电流或扭矩驱动器只有在接收到特定命令,告诉其应该产生的扭矩时,才能发挥作用。这个命令可以来自本质上充当“控制器”的各种来源。命令可以简单到人工根据期望的输出扭矩手动调节电位计,将 +/- 10 Vdc 信号应用于驱动器,充当控制器的作用。
典型的无刷直流伺服系统含有三种嵌入式环路及各种补偿和过滤元件。内部环路(电流环)受控于速度环,而速度环又受控于位置环。电流环始终位于驱动器中,而速度和位置环则位于驱动器或控制器中。电流环使用电机的电流传感器来测量电机绕组中的电流,而速度环使用速度传感器(通常是编码器)来测量电机速度,后者还提供位置信息来关闭位置环。
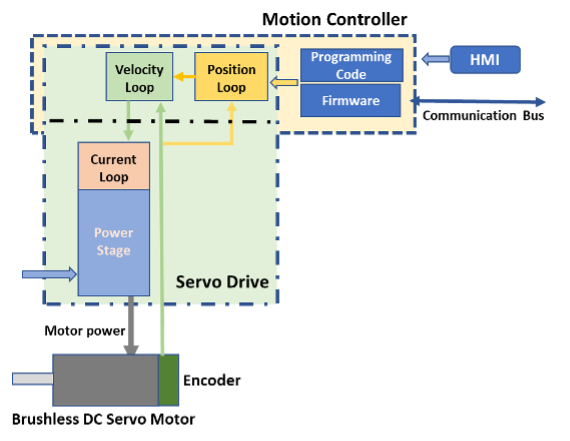
作为基于微处理器的设备,运动控制器具有生成脉冲宽度调制 (PWM) 波形的复杂算法 伺服驱动器内的功率晶体管通过传输电流和电压波形为电机供电。运动控制器通常会处理来自各种伺服回路的反馈信息。控制器使用反馈信息对电机进行换向,按照微处理器的命令实现精准运行。本质上,微处理器所提供的智能充当控制器,而与电源设备相关的电子产品充当驱动器。基本上,控制器是将特定命令应用于位置、速度或电流环的元件,而驱动器负责根据控制器的命令向电机提供电压和电流。
控制器通常是一种可编程设备,用于存储和运行程序员提供的代码。编程采用各种语言开发,如 BASIC、C+/C++、VB和 IEC 61131-3 标准中规定的语言。控制器配有大量安全元件,用于在组件发生故障时防止过载或停止运动控制。另一方面,驱动器往往专注于接收控制器的输入命令,并负责功率晶体管的开关。这使产生的电流和电压能够满足命令要求的扭矩和速度。
随着微处理器和新型开关设备不断得到改进,控制器和驱动器间的联系正变得越来越紧密——这主要体现在所有电子产品都位于同一个控制柜的集中系统中。在分布式解决方案中,运动控制器位于机柜中,而驱动器位于电机附近,然后通过运动控制现场总线与集中运动控制器通信。
审核编辑:刘清
-
伺服驱动器作用及其功能2025-02-20 3817
-
如何调试伺服驱动器2024-11-04 3560
-
伺服驱动器和伺服控制系统的区别2024-06-13 2868
-
伺服驱动器控制电源和主电源的区别2024-06-12 5238
-
伺服驱动器和伺服电机的区别2024-06-06 6948
-
伺服驱动器和伺服控制器的区别2024-06-05 5477
-
伺服控制器怎么调_伺服控制器和伺服驱动器的区别2023-03-12 4296
-
伺服驱动器的技术要求2022-09-09 2355
-
什么是伺服驱动器?运动控制器PLC又是什么?2021-06-28 7480
-
运动控制器与PLC的区别是什么2021-03-02 2972
-
运动控制器以模拟量信号控制伺服电机的步骤2020-06-12 6682
-
伺服驱动器的作用与变频器区别2020-05-13 11016
-
运动控制器控制伺服电机采用的指令和伺服电机调试的6个步骤说明2019-02-17 12901
全部0条评论

快来发表一下你的评论吧 !
