

工业视觉:工业相机的常见参数
MEMS/传感技术
描述
01
工业相机
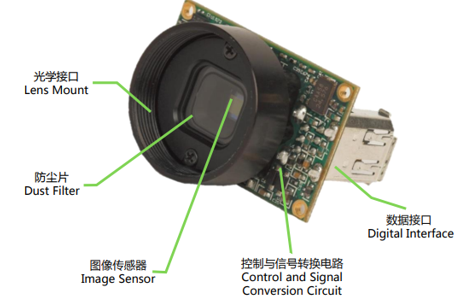
工业相机又称摄像机,相比于传统的民用相机(摄像机)而言,它具有高的图像稳定性、高传输能力和高抗干扰能力等,目前市面上的工业相机大多是基于CCD(Charge CoupledDevice)或CMOS(Complementary MetalOxide Semiconductor)芯片的相机。
02
相机分类
按照芯片类型:CCD相机、CMOS相机;
按照传感器的结构特性:线阵相机、面阵相机;
按照扫描方式:隔行扫描相机、逐行扫描相机;
按照分辨率:普通分辨率相机、高分辨率相机;
按照输出信号方式:模拟相机、数字相机;
按照输出色彩:单色(黑白)相机、彩色相机;
按照输出信号速度:普通速度相机、高速相机;
按照响应频率范围:可见光(普通)相机、红外相机、紫外相机等。
03
CCD和CMOS
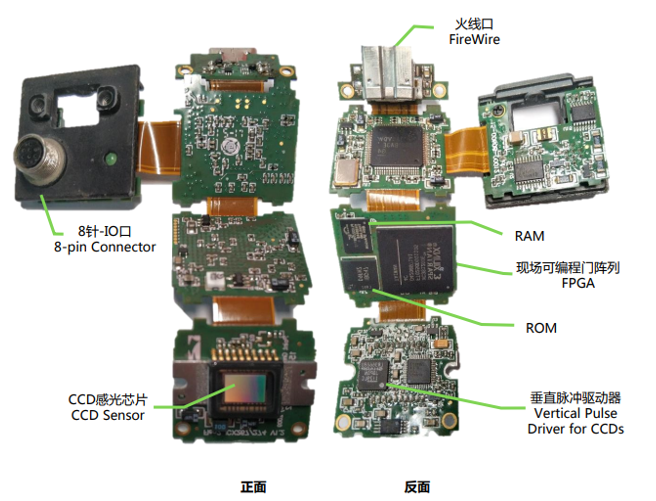
CCD是目前机器视觉最为常用的图像传感器。CCD相机由防尘片、传感器芯片、FPGA、RAM和ROM、火线口和I/O接口等组成。 工作原理:被摄物体一方的光线经过光学镜头聚焦至CCD芯片上,在驱动电路的驱动脉冲下CCD完成光电荷的转换、存储、转移和读取、从而将光学信号转换为电信号输出。CCD的突出特点是以电荷作为信号,而不同于其它器件是以电流或者电压为信号。CCD作为一种功能器件,与真空管相比,具有无灼伤、无滞后、低电压工作、低功耗等优点。
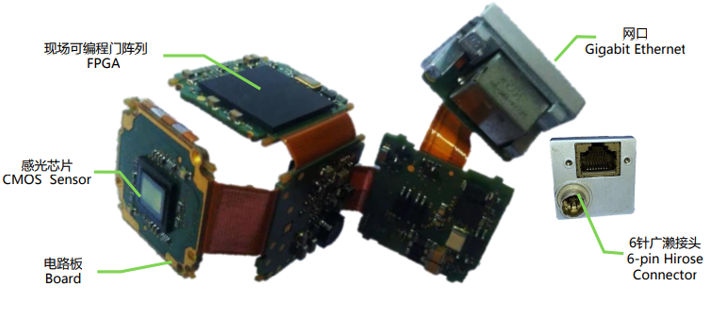
CMOS图像传感器的开发最早出现在20世纪70 年代初,90 年代初期,随着超大规模集成电路 (VLSI) 制造工艺技术的发展,CMOS图像传感器得到迅速发展。CMOS指的是制造图像传感器的过程而不是特定的成像技术。 CMOS图像传感器将光敏元阵列、图像信号放大器、信号读取电路、模数转换电路、图像信号处理器及控制器集成在一块芯片上,具有局部像素的编程随机访问的优点。目前,CMOS图像传感器以其良好的集成性、低功耗、高速传输和宽动态范围等特点在高分辨率和高速场合得到了广泛的应用。 
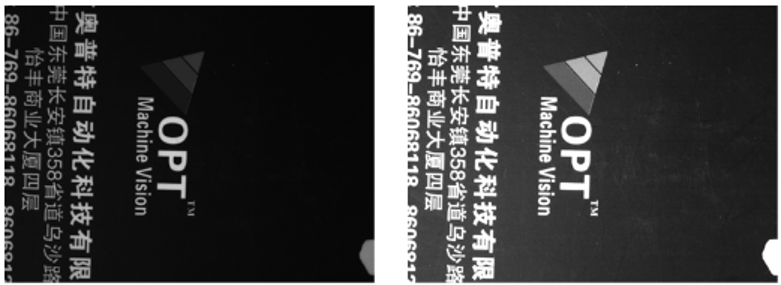
区别:当强光照射CCD传感器时,采集的图像中会出现光晕(Blooming) 和拖尾(Smear)现象,严重影响成像质量。


解决方法:调整相机增益;减少光线或者曝光时间,增加CCD读出速率;选择CMOS芯片(结构上解决)。
04
相机基本术语
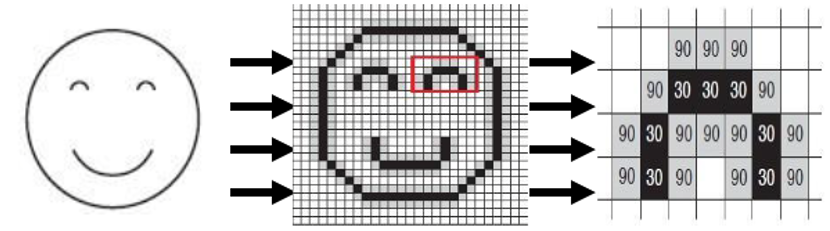
像素:感光器件上的基本感光单元,即相机识别到的图像上的最小单元(图中的每一个小格就是一个像素)。
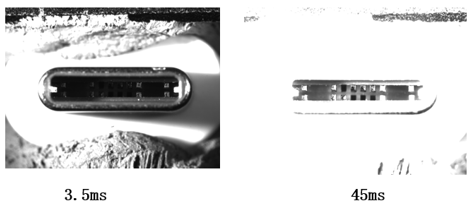
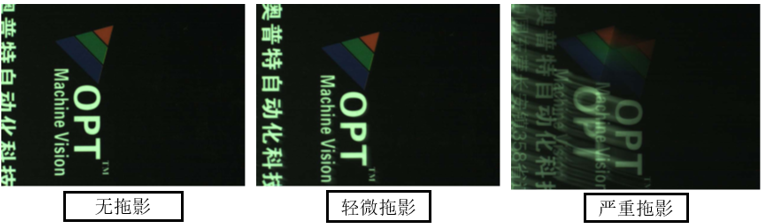
像元与像元尺寸:像元是芯片的组成单位,是实现光电信号转换的基本单元。像元尺寸一般为微米级(3-10微米) 像元深度:每像素数据的位数,对于黑白相机来说,像元深度定于灰度由暗到亮的灰阶数。一般常用的是8bit,还有10bit,12bit等。 曝光时间:是指相机从快门打开到关闭的时间间隔,曝光时间越长,图片越亮,同时,抗震动能力越差。对运动物体拍摄时,曝光时间越长,产生的拖影越长。过长的曝光时间会使相机的帧率降低。
分辨率:图像上单个单个像素所代表的实际尺寸,分辨率=视野/像素数(同方向)。 帧率:单位为FPS(frame per second),即帧/秒,指相机每秒钟能采集多少幅图像,1幅图像为1帧。例如15帧/秒,表示相机一秒钟最大能采集15幅图像。一般来说,分辨率越大的相机,帧率越低。最高帧率是相机的重要性能参数之一,主要取决于采集速度、数据转换速度和数据传输速度。 行频:线阵工业相机的速度即行频的单位是KHz。比如:12KHz表示线阵工业相机在1秒钟内最多能采集12000行图像数据。 增益:将图片的数字信息同时扩大,当图片比较昏暗时,可以增加对比度和亮度,提高成像效果。但是当图片已经很亮时,扩大增益会适得其反。
噪声:相机芯片电路和信号传输电路中形成的干扰信号,导致图像中出现非实物反映的图像。拖影:拍摄运动图像时,同一物体,在图片上重复成像的现象。
编辑:黄飞
-
工业视觉系统中工业相机的选型维度2026-04-14 636
-
机器视觉中工业相机与民用相机的区别志强视觉科技 2023-12-05
-
工业镜头常见参数应用介绍2023-12-04 603
-
工业相机镜头常用参数选型教程4 #工业相机选型 #工业镜头选型 #机器视觉检测志强视觉科技 2023-10-13
-
工业相机选型教程2# 工业相机# 工业相机选型#志强视觉科技 2023-09-22
-
工业相机参数之帧率相关知识详解2023-06-25 5176
-
工业智能相机—集成视觉检测软件的CCD工业相机2022-06-16 4047
-
回收AVT工业相机,basler工业相机,sony工业相机2021-10-19 653
-
上海回收康耐视工业视觉系统,工业相机,工业镜头2021-08-06 991
-
无锡回收基恩士工业视觉系统,工业相机 工业视觉系统等2021-06-03 1153
-
在工业视觉检测设备中如何选择工业相机产品2020-10-14 3617
-
深圳康耐视CCD工业视觉相机高价回收2020-09-22 903
-
解析工业相机如何进行视觉检测2020-07-30 6479
-
如何选择合适的工业相机,工业相机的优势2020-06-19 2924
全部0条评论

快来发表一下你的评论吧 !
