

一文解析西门子S7-1200的Modbus RTU通信
工业控制
描述
西门子S7-1200通过通信板和通信模块可以进行Modbus RTU通信,PLC作为控制器,一般用作Modbus主站。当作为Modbus主站时,一般会对多个从站设备的参数进行轮询。本文介绍西门子S7-1200作为Modbus RTU主站时的定时轮询程序。
1
主要使用的硬件和软件
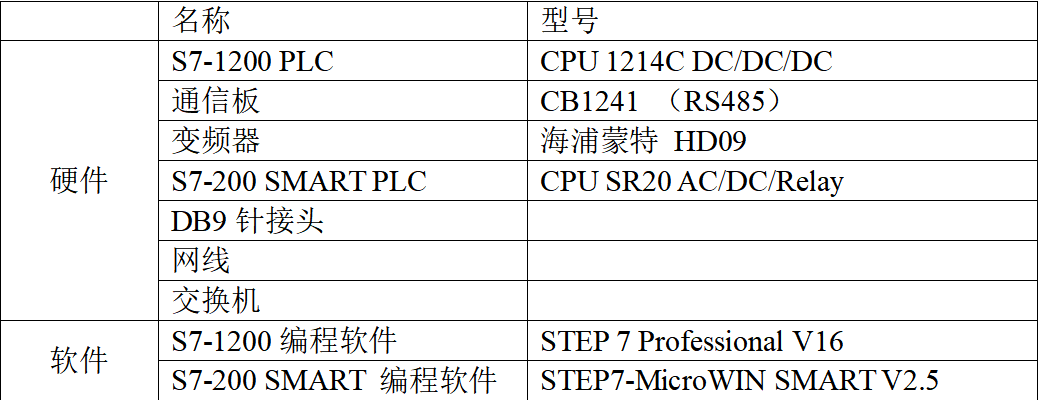
2
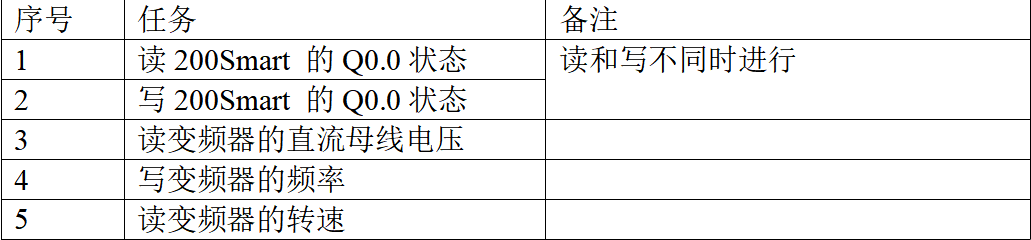
通信任务
3
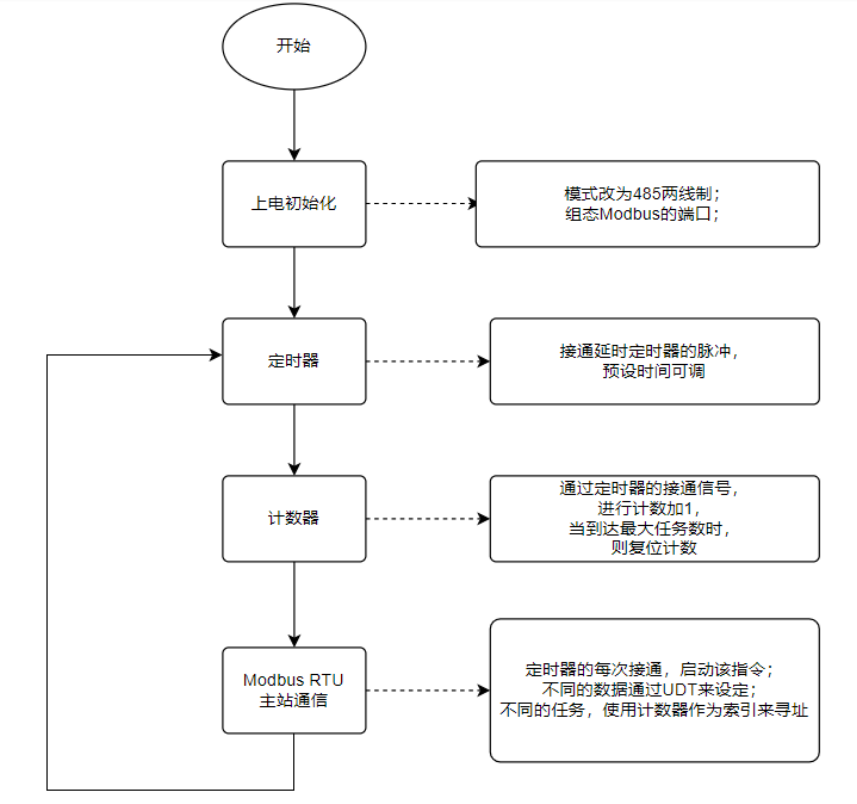
程序思路
要实现该功能,采用定时器轮询的方式来读写参数,其流程图如下所示。
4
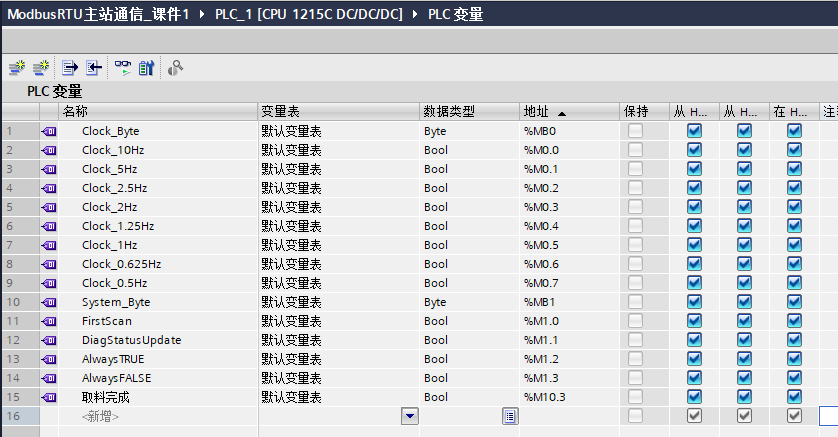
PLC程序
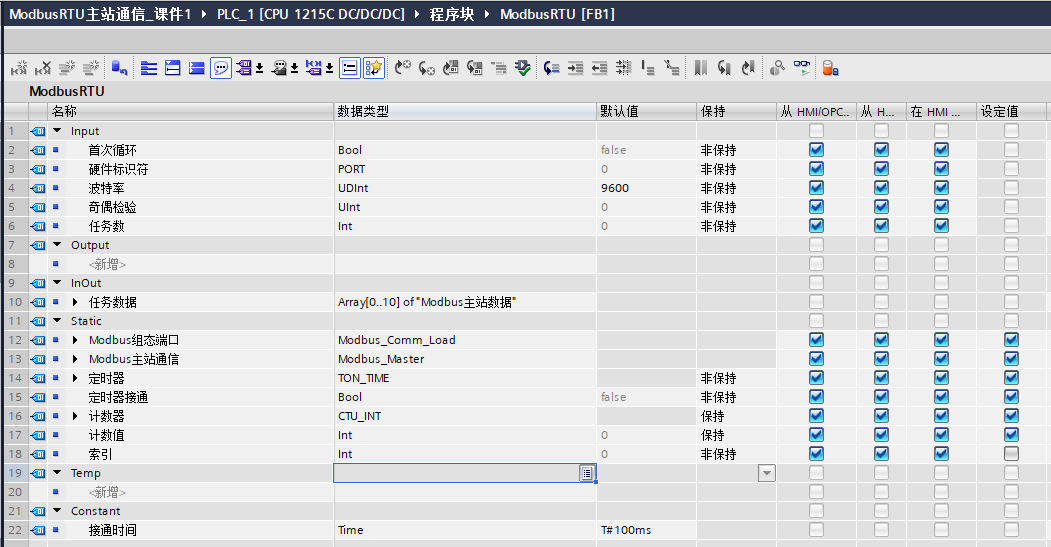
在该程序中,使用FB块的方式进行封装,其用到的PLC变量、PLC数据类型、全局数据、FB接口如下所示。

上电初始化程序

将有效的工作模式改成4,也就是半双工(RS485)二线制模式
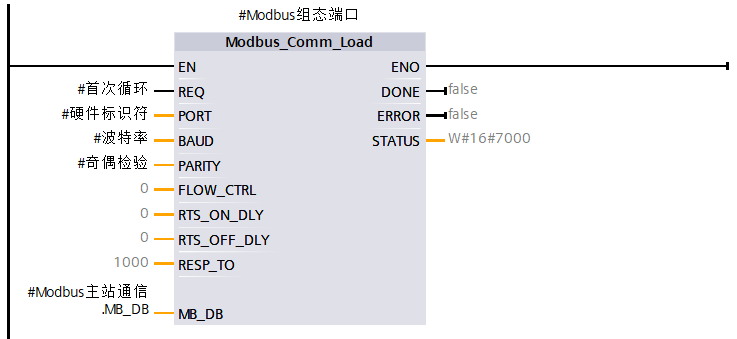
初始化Modbus组态端口,首次循环、硬件标识符、波特率、奇偶校验在形参中定义,MB_DB来自Modbus RTU主站的背景数据块。
定时器程序
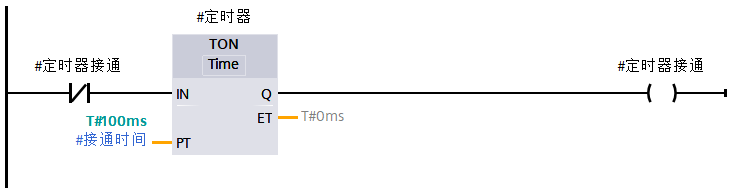
定义100ms的定时器脉冲,该时间可根据Modbus主站读写的速度来调整。
计数器程序
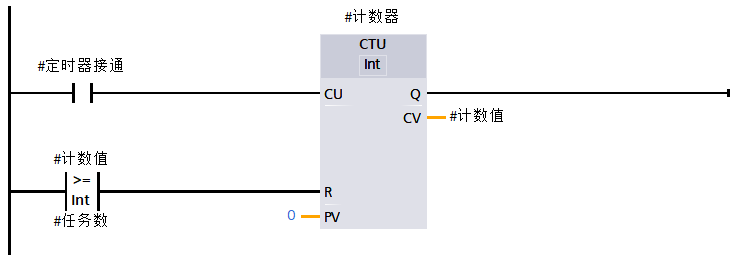
定义计数器的值,通过定时器接通的信号,进行计数加1,当计数值大于等于任务数的时候,则复位计数值。这里的任务数是Modbus轮询时的任务数量,该程序中任务数4。
Modbus RTU主站通信

由于PLC数据类型(UDT)的数组是从0开始,所以对计数值进行减1操作。
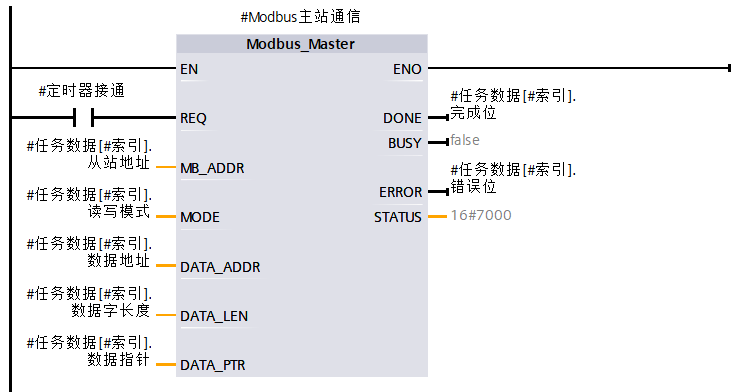
Modbus主站轮询的程序,定时器接通信号作为触发信号,输入数据和状态使用PLC数据类型(UDT),不同的任务使用索引来寻址。
OB中调用FB块
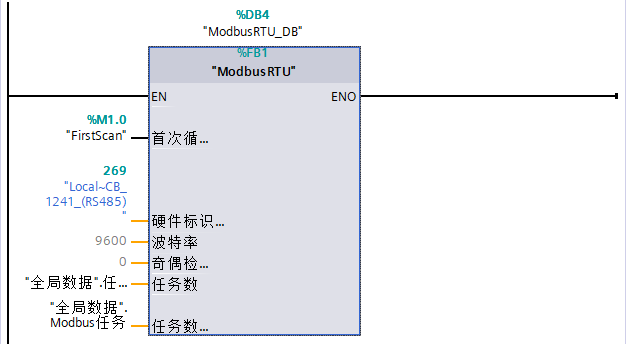
将该FB块在OB1中调用,并关联实参。
5
参数设置
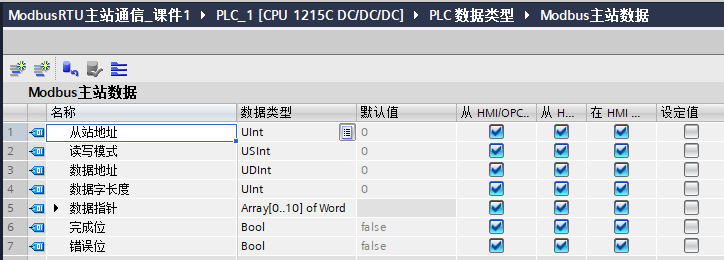
在该项目中,需要完成5个任务(详见2. 通信任务),由于任务1和任务2不同时进行,则是4个任务进行轮询。其参数在全局数据块中进行设置,如图所示。
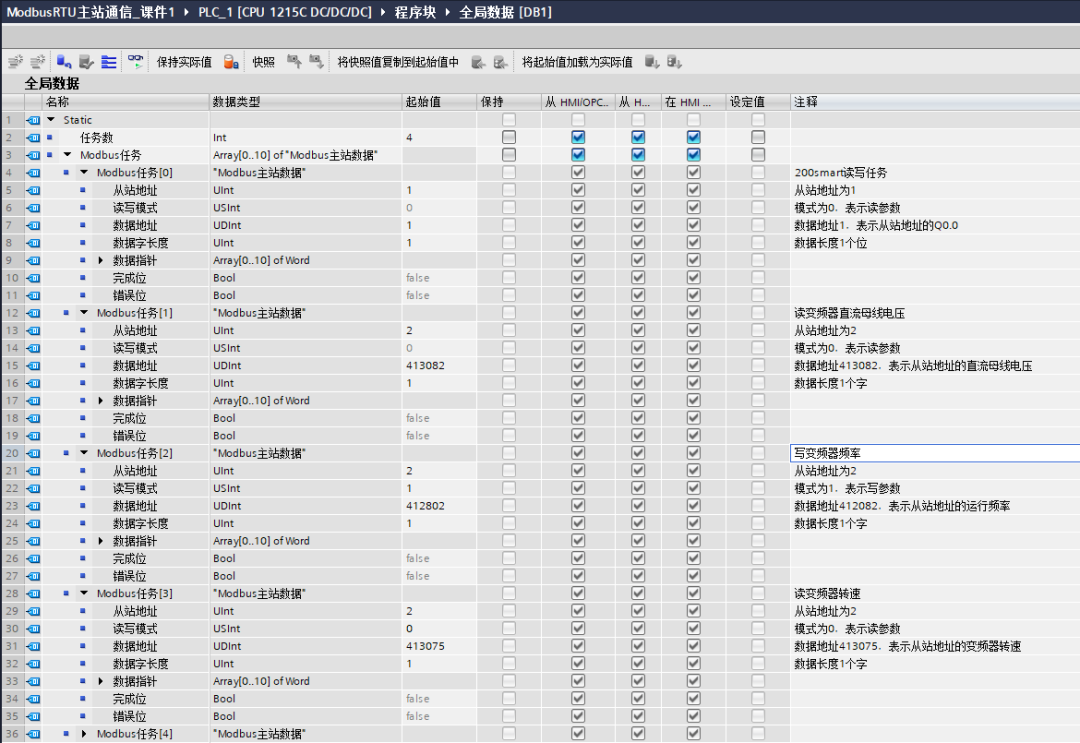
这里的从站地址、读写模式、数据地址、数据长度需要根据实际的任务进行设定。
对于其中的一个任务需求是,读和写进行分开,所以可以通过外部的条件修改模式和给定的值,如下图所示。
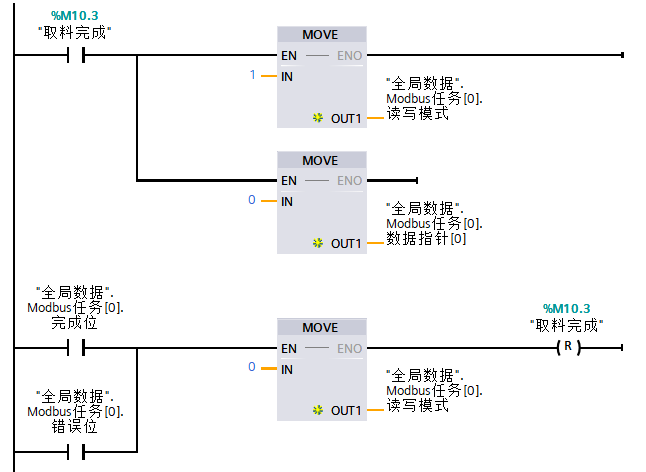
当需要写入参数时,给定一个写命令,也就是这里的“取料完成”信号。通过该信号,更改任务1(索引是0)的读写模式和值,当该任务完成或出错,复位该信号。
6
总结
以上就是该程序的全部内容。这种定时轮询的方式优点是就算其中一个设备出现故障,由于其定时轮询的方式,也不影响其它设备,适合从站的数据类似,读写的速度接近且不要求进行故障处理的场合。如果大家有更多关于Modbus的应用,欢迎留言交流。
编辑:黄飞
-
西门子PLC s7-1200 1500 modbus-rtu通信实例编程详细指导2020-11-24 2632
-
西门子S7-200到S7-1200的软件转换工具2015-05-08 2080
-
西门子S7-1200 和 S7-1500 的编程指南pdf下载2018-03-27 9315
-
西门子S7-1200 PLC的在线模拟方法免费下载2020-12-17 1851
-
西门子S7-1200高速计数功能简介2021-04-23 2087
-
西门子S7-1200接入MQTT私有云平台2021-11-11 5353
-
西门子S7-1200和S7-1500编程风格指南2022-08-17 1669
-
如何通过网关对西门子S7-1200 PLC远程监控?2022-11-01 7981
-
西门子S7-1200的TCP通信配置过程及数据交换方式2022-11-16 20592
-
西门子S7-1200与组态软件之间无线MODBUS通信实例2023-01-11 4302
-
西门子PLC S7-1200在线下载功能分享2023-06-25 4562
-
如何选择合适的西门子S7-1200 PLC2023-07-26 3280
-
PLC西门子S7-200smart和S7-1200的区别?2023-11-17 18435
-
西门子S7-1200 PLC的基本功能2024-06-13 5272
-
西门子S7-1200 PLC的指令介绍2024-06-18 7388
全部0条评论

快来发表一下你的评论吧 !
