

如何入手分析PMSM电机输出扭矩波动和扭矩偏差的现象?
工业控制
描述
电驱产品前期开发阶段,时常遇到电机输出扭矩波动或扭矩偏差的现象,甚至在后期客户装车时也会出现这现象,这就要求现场调试人员快速锁定问题点,减少项目技术风险。然而,现场调试的工程师往往并不是开发和熟悉控制模型的算法工程师,可能是系统工程师、测试工程师、标定工程师或现场调试工程师,因此,电驱输出扭矩波动、扭矩偏差等问题将带给现场调试人员不小的压力,如何快速切入问题点的分析就显得尤为重要。
下面将介绍如何入手分析PMSM电机输出扭矩波动和扭矩偏差的现象。
**1. **扭矩控制的要求
为了分析扭矩波动和扭矩偏差问题,首先我们需要了解扭矩控制精度和扭矩阶跃响应要求:
1).扭矩精度要求
在《GB/T18488.1-2015-电动汽车用电机及其控制器第1部分-技术条件》3.11中给出了转矩控制精度的定义。某OEM提出扭矩精度要求:电机输出扭矩在0~100Nm范围内,精度控制在±3Nm内;而大于100Nm时,精度控制在±3%内。
2).扭矩阶跃相应要求
扭矩阶跃相应要求主要是关注“电机输出扭矩”跟随“车辆请求扭矩”的动态性能,例如:整车的Tip in工况,主要考核指标为“扭矩阶跃相应时间”、“扭矩阶跃相应的过冲量”,如图1 所示,为某OEM对扭矩阶跃响应的要求。
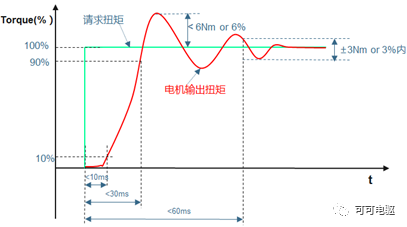
图1. 扭矩阶跃相应示意图
另外,扭矩控制还有其他需求,如:堵转以及功能安全对扭矩的限制要求等,这些都属于电驱系统安全保护范畴,在此不作分析,后期另起篇幅来阐述。
2. 影响PMSM****电机输出扭矩的因数
根据PMSM电机的FOC控制方法,如图2所示,可知电机输出扭矩的计算:


图2.电机控制示意图
其中,
λpm---为PSM电机转子永磁体磁链;
id,iq---为根据参考扭矩T查表得出d轴和q轴等效参考电流,
Ld,Lq---为d轴q轴等效电感;
θ---电机转子的电角度;
iu,iv,iw---电流传感器采集的三相电流;
Udc---直流母线电压;
TLoss---电机机械摩擦阻力;
根据上述扭矩的计算公式,可知与电机输出扭矩的相关因数。
1). 转子永磁体磁链λpm:
因转子制造的误差差,磁钢的分布误差,转子上磁链的分布不均匀对称,则导致电机输出扭矩存在波动。另外,因永磁体是个热敏感型材料,不同温度下,转子磁链的大小也不同,则导致电机输出扭矩存在偏差。
2). d轴和q轴等效参考电流id,iq:
根据参考扭矩查表得出对应的参考电流id,iq,其给定值存在偏差,则导致电机的输出扭矩存在偏差。另外,Id,Iq在进入电流环进行PID调节和解耦处理不当时,则导致电机输出扭矩存在波动,特别是扭矩阶跃响应的动态特性,如图1所示。
3). 转子电角度θ:
转子电角度θ存在偏差,例如:位置传感器输出幅值不平衡,零位偏角误差,正交误差,以及运算处理延时误差等,则导致电机输出扭矩存在波动及偏差。
4). 定子电感Ld,Lq:
因电机制造和安装偏差,定转子不同轴,气隙存在不均衡等,引起定子电感的偏差,则导致电机输出扭矩存在波动及偏差。
5).三相电流iu,iv,iw:
因逆变器死区和IGBT开关管导通压降等非理想因素影响的存在,同时在高速区为了提高电压利用率而采用不同的SVPWM方法等,引起三相电流输出存在许多高阶次电流谐波,则导致电机输出扭矩存在许多高阶次波动;同时,三相电流传感器采样误差以及反馈中id,iq运算延时误差的存在,则导致电机输出扭矩存在偏差。
6). 直流母线电压Udc:
因母线电压Udc未直接参与扭矩的计算过程,只是在参考电流id,iq查表时使用到参考量Udc, 相对而言,只要Udc偏差不离谱,则母线电压纹波和测量误差对电机输出扭矩的影响甚微。
7). 电机机械摩擦力TLoss:
因电机轴承的摩擦而存在摩擦阻力,则导致电机输出扭矩存在偏差。
针对上述影响电机扭矩输出的因素,电机控制软件都相应地做补偿或修正,故当电机输出扭矩存在波动或偏差时,我们可逐一分析上述因素及其修正的策略。另外,还需考虑电机控制器运算处理的时间延迟,即是整车请求扭矩到实际扭矩输出存在时间差,是影响电机输出扭矩阶跃响应时间的重要因素之一。
**3. **整车运行环境对电机输出扭矩的影响
为了车辆运行的舒适性和安全性,我们往往需要考虑整车运行的环境,相应地对驱动电机输出扭矩做适当调整。如图3所示,从整车控制器发出的请求扭矩T到电机的参考扭矩Te_ref ,(Te_ref见如图2所示),往往因运行环境的非理想化而需要进行各种扭矩限制或补偿修正,导致电机输出扭矩与请求扭矩出现偏差,甚至出现扭矩波动。

图2.整车动态控制示意图
1) 跛行模式
当整车出现非严重性故障时,车辆需要跛行回家维修,则要求车辆驱动系统进入跛行模式,限制最大车速和驱动系统输出的最大扭矩。
2) TCS****限制驱动系统最大/最小扭矩输出
当TCS功能被触发,例如:打滑工况,则要求限制驱动系统最大或最小输出扭矩。
3 )防抖功能
为了消除车速抖动,例如:tip in、tip out工况等,需要在现有请求扭矩的基础上叠加一个消抖扭矩。
4 )摩擦阻力矩
为了确保整车控制器请求扭矩与电驱动系统输出扭矩的一致性,需要要补偿电机或减速箱内摩擦力矩。
5 )降功率模式
当电驱系统出现过温、过压、过速、过流等环境因素,即将影响驱动系统运行时,则要求电驱动系统进入降功率模式运行,限制电机输出扭矩,避免电驱系统环境因素恶化。
上述前三点功能部分主机厂要求在整车控制器内部实施,也有部分主机厂会要求在电机控制器内部实施,同样还有防滑控制、防腾空控制等要;后两点基本电机控制软件内部都要求实现。
为了快速锁定电机输出扭矩的波动和偏差的问题点,我们可以对比“整车控制器请求扭矩”、“电机参考扭矩Te_ref”和“电机实际输出扭矩”来确定扭矩波动和偏差发生的大致方向,然后,结合车辆运行环境(例如:冷却液流量、电驱系统温度、电压、电流、速度、故障灯等因素)以及第2节提到的电机控制来进一步确定问题点。
-
汽车电机扭矩与电能测试方案2026-04-01 4080
-
减速电机扭矩的含义2024-12-19 3530
-
电机的转速和扭矩的关系2024-09-07 15525
-
伺服电机出现抖动,扭矩波动如何处理?2024-01-09 1684
-
电机扭矩是什么意思 电机扭矩计算公式2023-03-27 24634
-
速度电机和扭矩电机区别2021-10-11 19911
-
永磁同步电机扭矩脉动分析2021-08-27 1657
-
动态扭矩传感器和静态扭矩的区别2019-07-25 12837
-
PMSM FOC中的扭矩限制2019-06-18 2730
-
用于扭矩控制系统的PMSM FOC lib从0rpm开始2018-12-21 1974
-
电机静态扭矩如何计算2017-11-09 22977
-
什么是电动机扭矩_电机功率与扭矩的关系_电动机扭矩单位及换算2017-08-24 44284
全部0条评论

快来发表一下你的评论吧 !
