

 基于STM32+ESP8266+华为云IoT设计的健康管理系统并完成应用侧开发
基于STM32+ESP8266+华为云IoT设计的健康管理系统并完成应用侧开发
描述
一、前言
近几年随着科技的进步和智能化浪潮的到来,智能穿戴设备也在飞速火爆发展,各种健康智能手环,智能手表、智能跑鞋、智能眼镜纷纷上市,并出现了很多针对个人家庭的健康管理设备。比如: 智能血压计、智能心率检测、脂肪秤、智能体重秤等等,都带上了智能、健康各种标签。
可穿戴设备,即直接穿在身上,或是整合到用户的衣服或配件的一种便携式设备。可穿戴设备不仅仅是一种硬件设备,更是通过软件支持以及数据交互、云端交互来实现强大的功能,可穿戴设备将会对生活、感知带来很大的转变。
这篇文章就利用STM32加上各种外设传感器配合华为云IOT物联网平台设计一个健康管理设备,通过ESP8266+MQTT协议将数据传输导致华为云物联网平台,并通过华为云的应用侧完成应用层软件开发;设计本项目的目的就是,上手体验华为云物联网平台,并探究一下智能设备的实现原理。
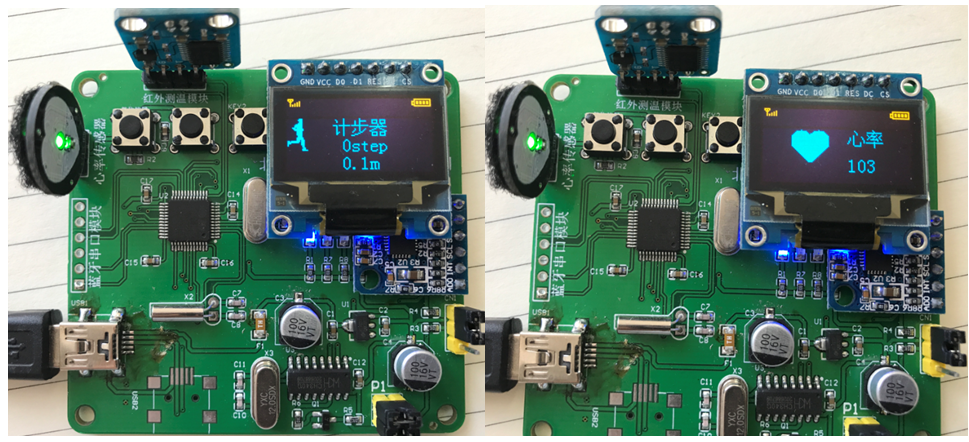
当前设计的监控管理设备支持的功能有: (1)人体温度测量 (2)运动监测、计步功能 (3)睡眠监测 (4)心率测量
STM32采集这些传感器数据之后,进行处理,在本地OLED显示屏上完成显示;再通过ESP8266将数据传递到华为云物联网平台,关联数据可视化大屏完成数据展示。
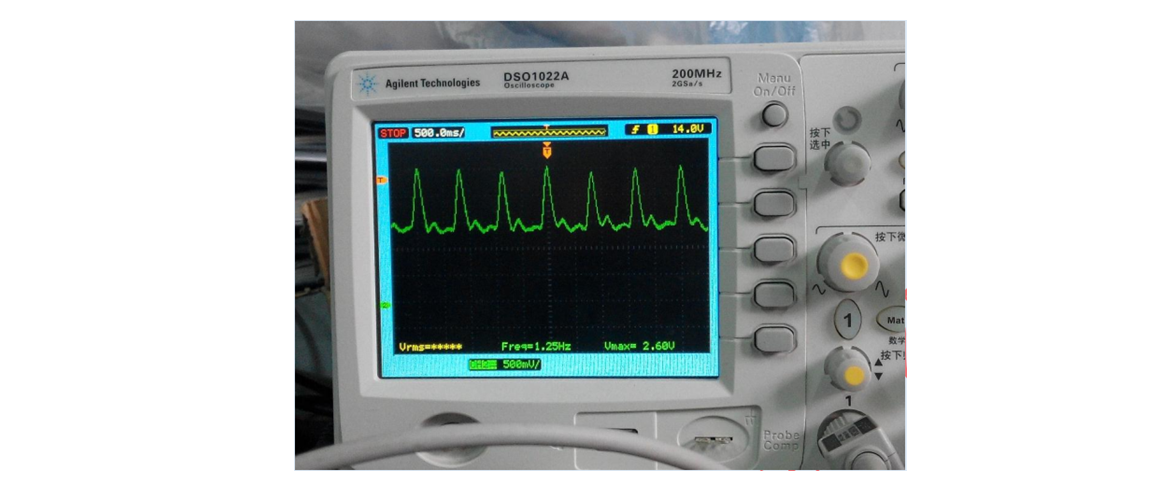
下面是示波器测量的心率显示 :
设备运行效果:

二、硬件介绍
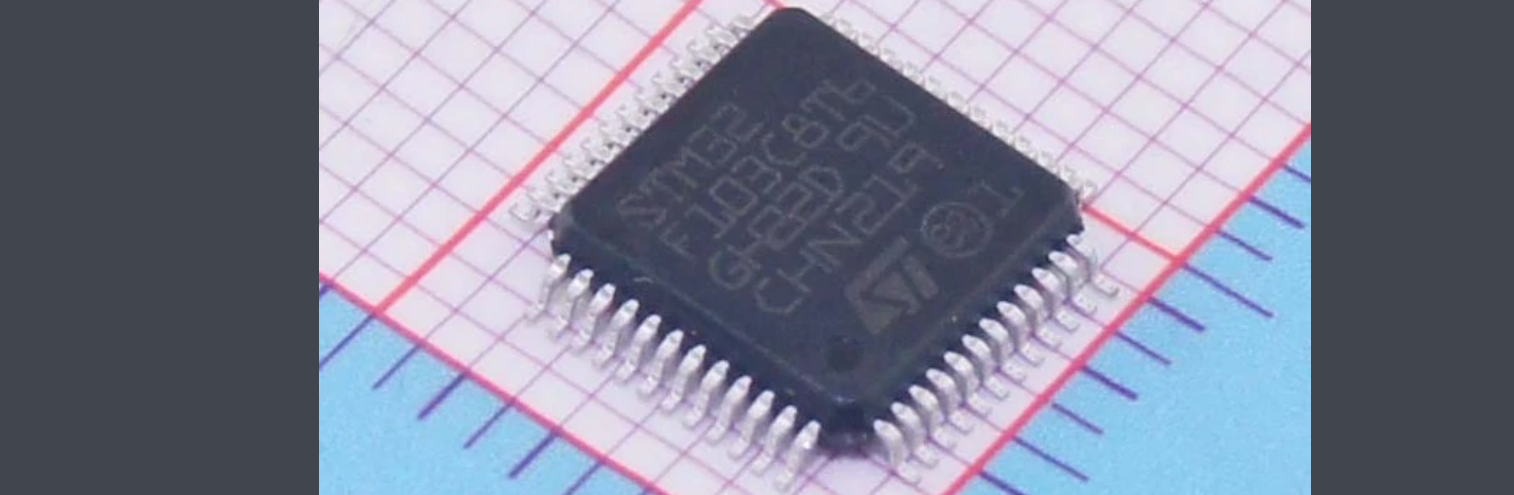
2.1 主控芯片
主控芯片采用STM32F103C8T6,它一款基于ARM Cortex-M 内核STM32系列的32位的微控制器,程序存储器容量是64KB,RAM空间是20K,工作电压2V~3.6V,运行速度72MHZ。
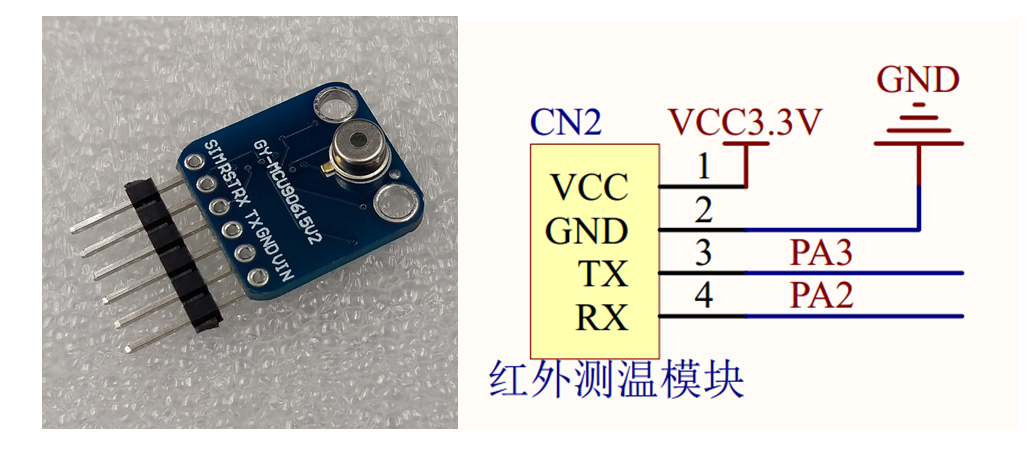
2.2 体温测量
人体温度测量,采用非接触式红外测温芯片GY-MCU90615,工作电压 3-5v 功耗小,体积小。其工作原理, 是通过单片机读取红外温度度数据,串口(TTL 电平)通信方式输出。串口的波特率有 9600bps 与 115200bps有连续输出与询问输出两种方式,可适应不同的工作环境,与所有的单片机及电脑连接。
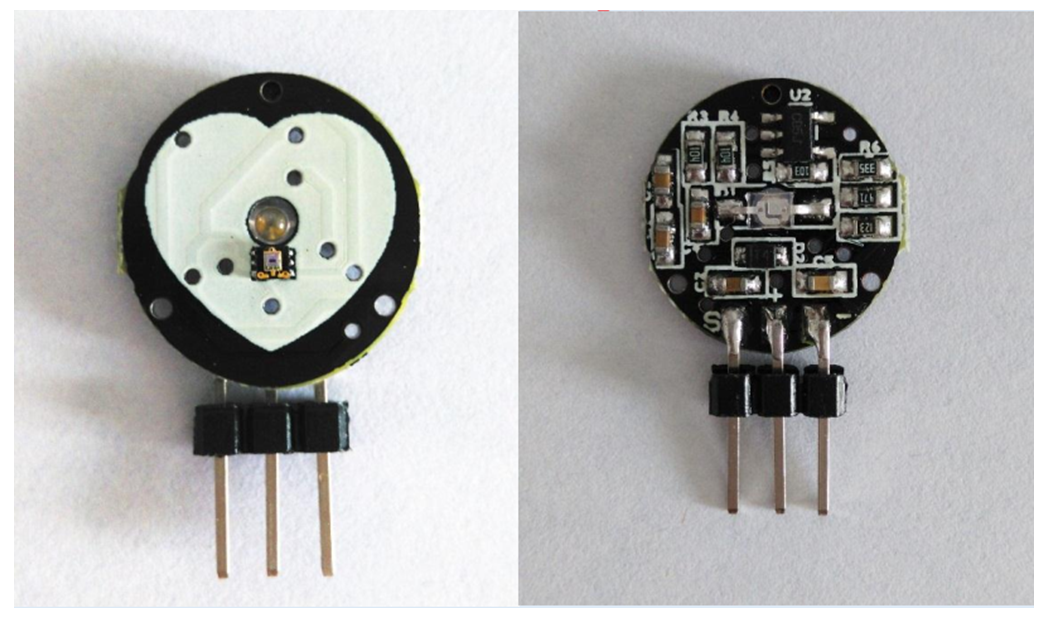
2.3 心率测量
心率测量,采用PulseSensor传感器,这是一款用于脉搏心率测量的光电反射式模拟传感器,通过模拟输出口可将采集到的模拟信号传输给 STM32单片机用来转换为数字信号,再通过单片机简单计算后就可以得到心率数值。
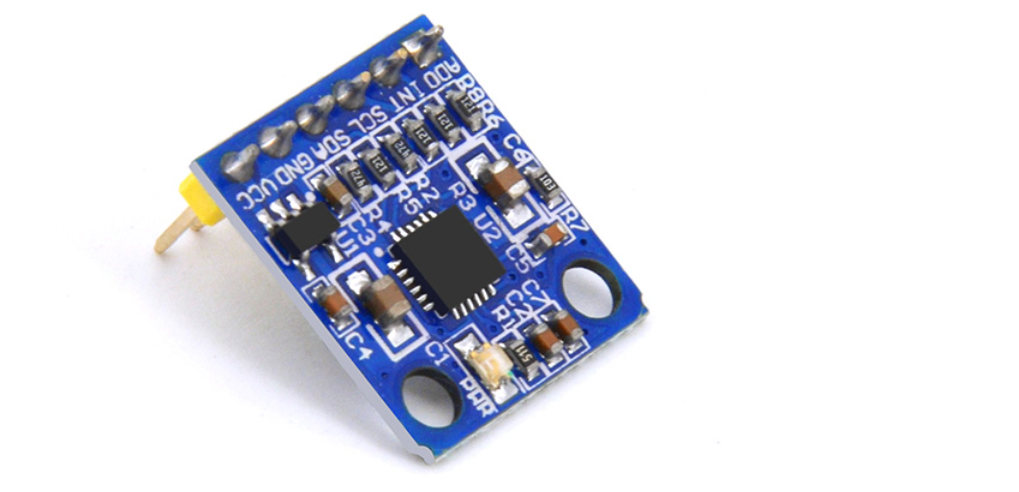
2.4 计步、睡眠监测功能
计步模块,睡眠监测,运动监测功能采用MUP6050陀螺仪实现,这是一款高性能三轴加速度+三轴陀螺仪的六轴传感器,该模块采用InvenSense 公司的 MPU6050 芯片作为核心, 该芯片内部整合了3轴陀螺仪和3轴加速度传感器,并可利用自带的数字运动处理器硬件加速引擎,通过主 IIC 接口,向应用端输出姿态解算后的数据。有了DMP,可以使用 InvenSense 公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度。 MPU6050 模块具有:体积小、自带 DMP、 自带温度传感器、 支持 IIC 从机地址设置和中断、兼容 3.3V/5V 系统、使用方便等特点。
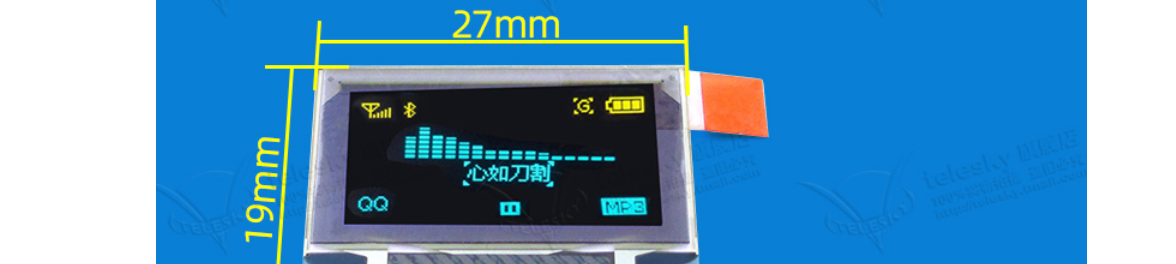
(5)本地数据显示用的OLED显示屏采用0.96寸的SPI接口显示屏,分辨率为 128*64,主要是在本地显示采集的数据,时间等信息。
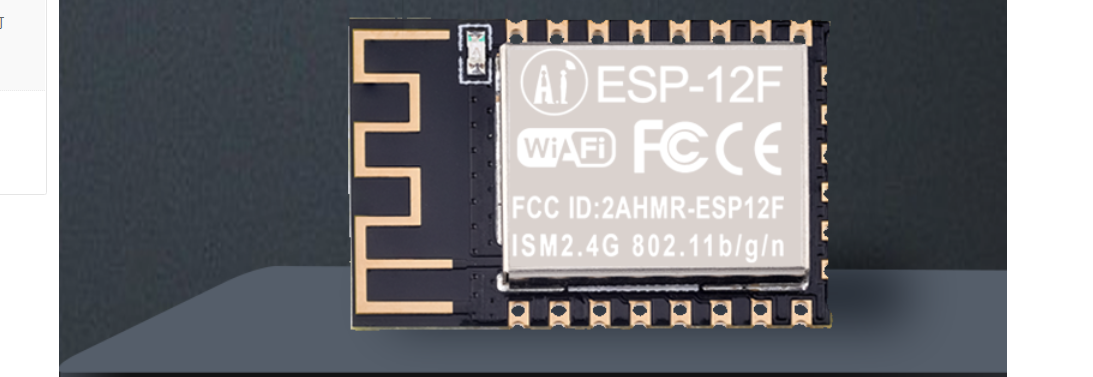
(6)上网的模块采用ESP8266,ESP8266是物联网领域常见无线网卡芯片,支持AT指令,支持串口协议控制,只需要几个简单的AT指令就可以完成网络连接,数据传输。当前项目里,就是通过ESP8266将采集的数据传递到华为云IOT平台,实现数据展示。
三、创建IOT产品、上云测试
3.1 创建产品
官网地址: https://www.huaweicloud.com/s/JeeJqeiBlOe9kSU
选择IOTDA进入,选择免费试用。

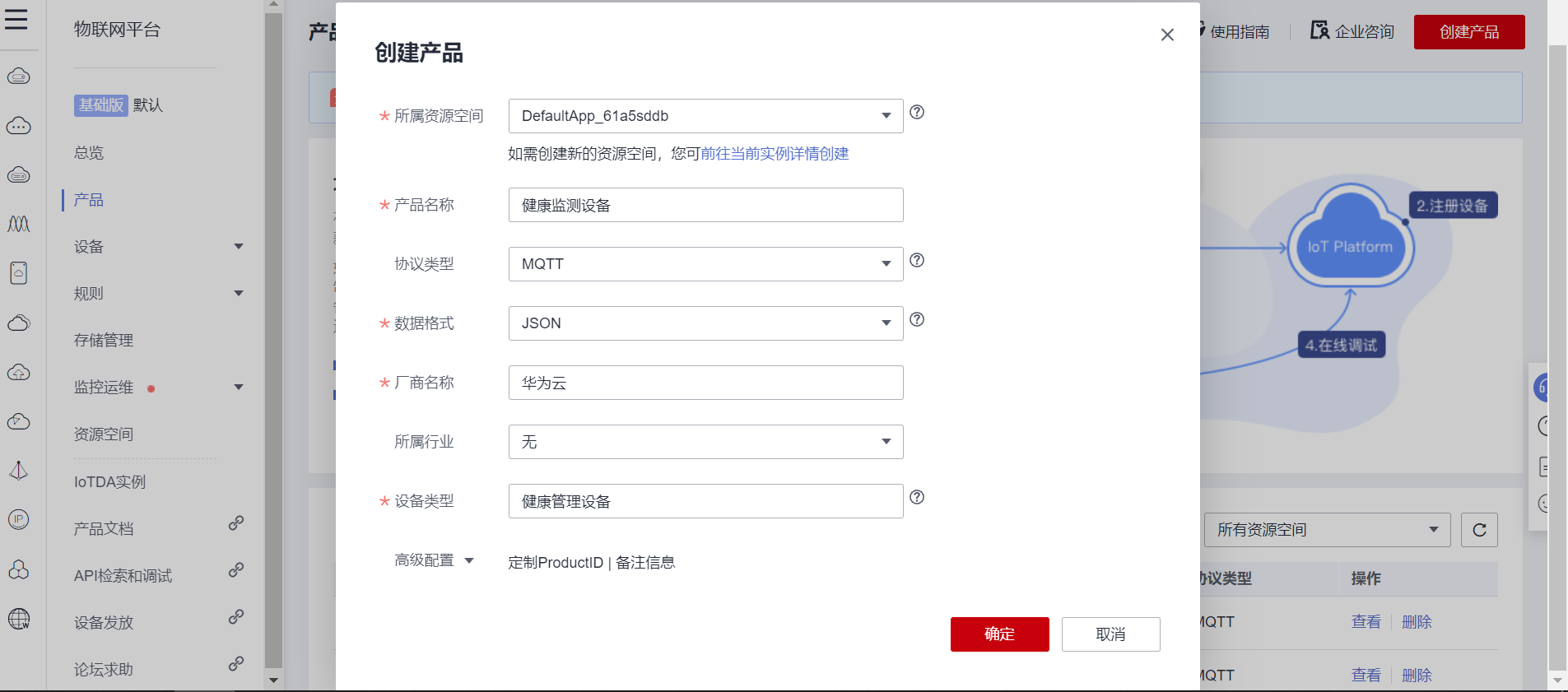
在产品页面,选择右上角创建产品。

根据提示,填入对应参数。
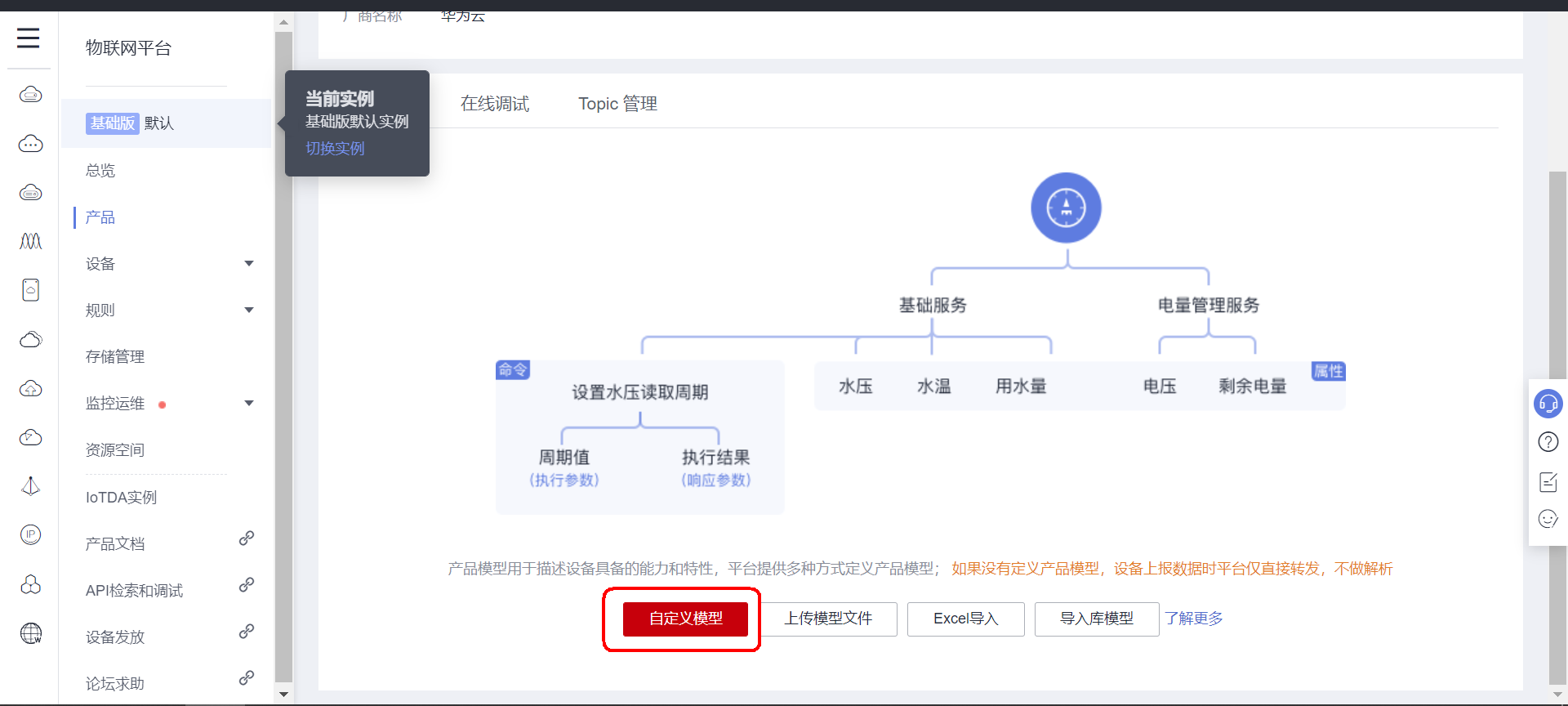
创建好之后,查看产品详情,进入属性配置页面。

选择自定义模型。
添加服务。
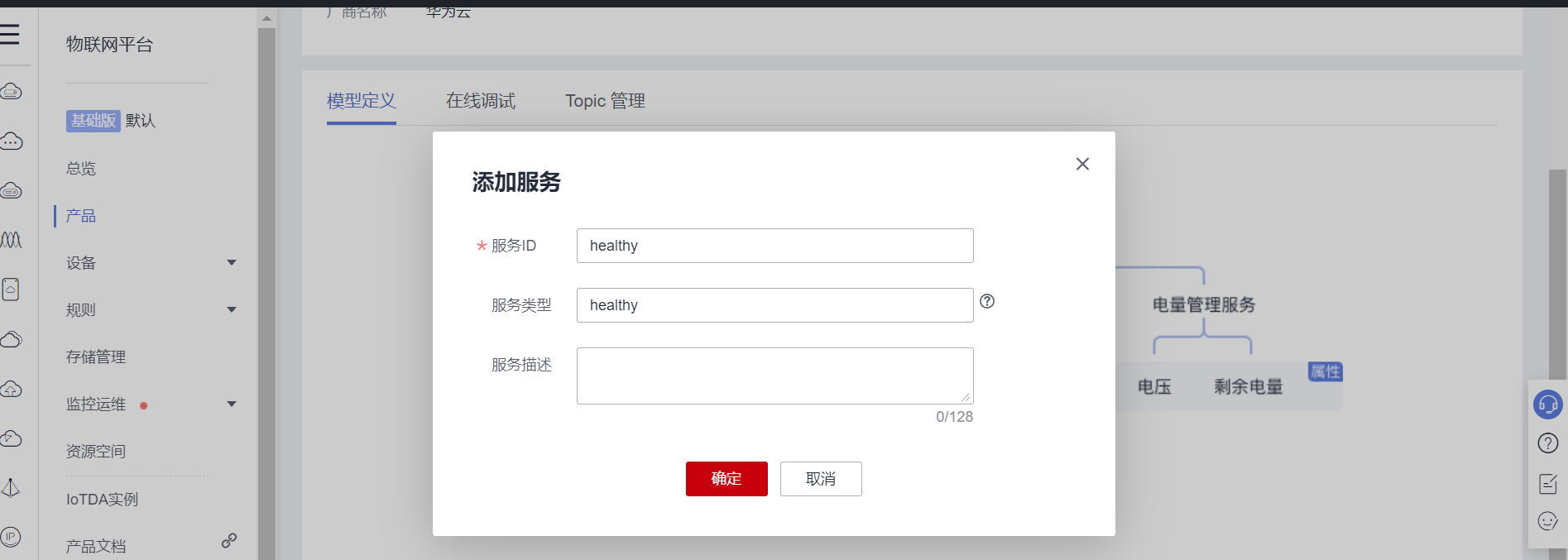
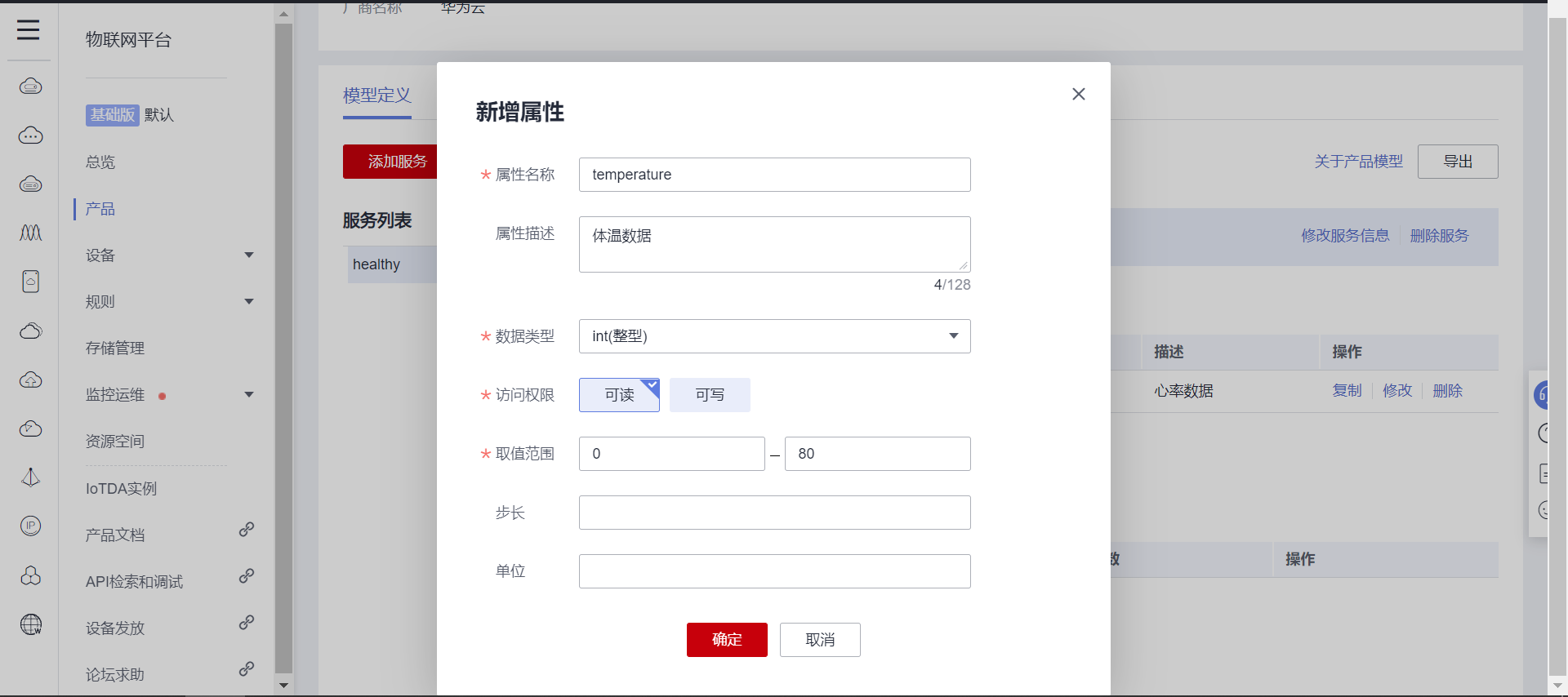
接下来就添加属性,属性就是传感器上传的数据类型,需要展示的数据;根据自己传感器的数量、类型自己设置即可。
添加心率传感器数据属性。

添加体温传感器数据属性。
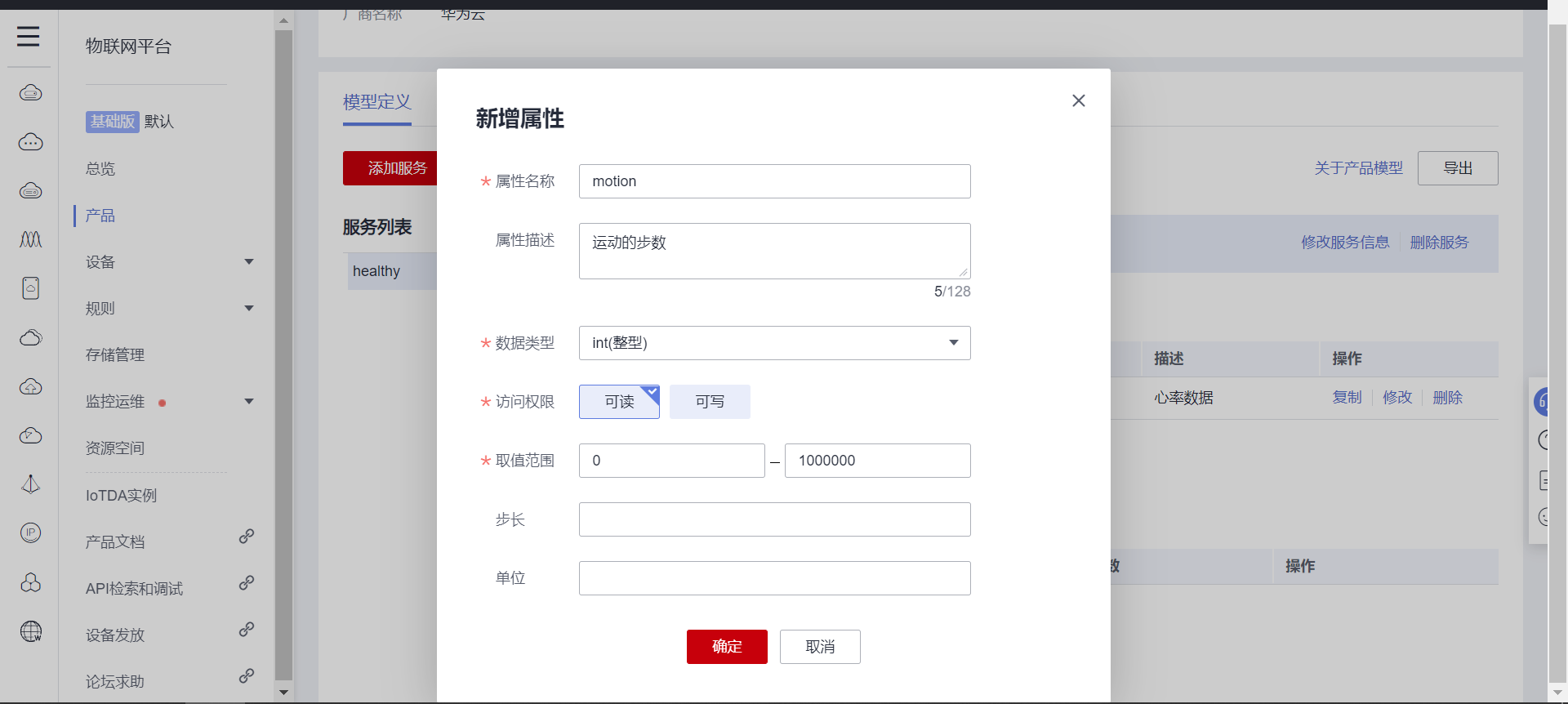
添加计步功能的数据属性。
创建成功:

3.2 注册设备
打开设备页面,点击右上角注册设备按钮,根据提示和产品的信息填入;创建完保存得到的信息。
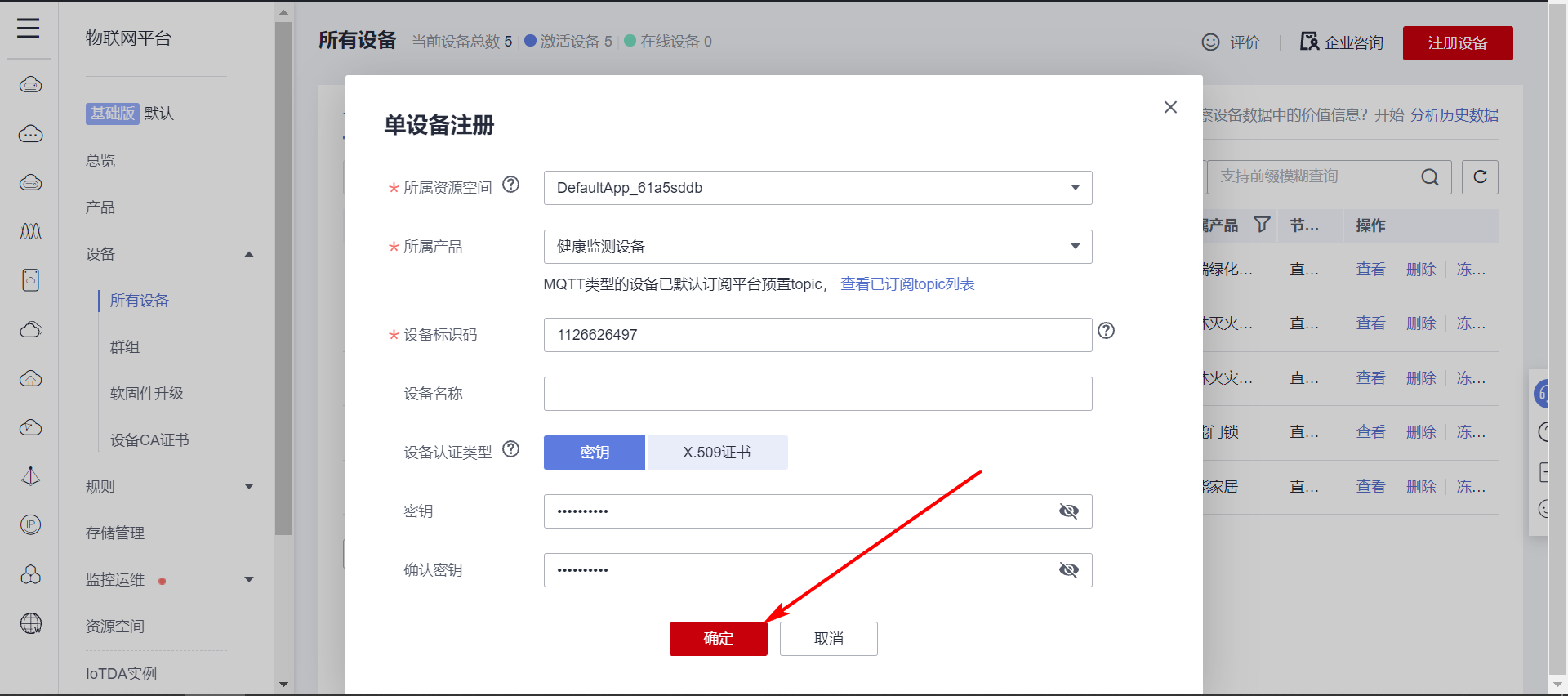
点击确定之后,创建成功效果如下;目前设备还未激活,需要设备登录一次服务器即可激活;接下来就是如何登录了。

3.3 设备上云测试
完成产品、设备创建之后,接下来采用MQTT客户端模拟设备,测试是否可以正常上华为云。
连接协议使用MQTT协议,MQTT协议登录服务器,就像QQ登录一样,需要输入账号、密码等一些信息;下面先利用华为云的小工具完成这些数据的创建。
华为云提供的MQTT账户信息生成在线小工具: https://iot-tool.obs-website.cn-north-4.myhuaweicloud.com/
前面两行填入的数据,在创建设备成功时提示下载的文件里有,照着填写即可。

我的设备生成的数据如下:
ClientId 61df9a6bc7fb24029b0c160d_1126626497_0_0_2022011303
Username 61df9a6bc7fb24029b0c160d_1126626497
Password 20618c172eb24418e0910804889c7d2074a5847e9e7205a41a8bf5adeec399f9
华为云IOT平台的MQTT服务器地址信息如下:
端口: 1883
域名: a161a58a78.iot-mqtts.cn-north-4.myhuaweicloud.com
IP地址: 121.36.42.100
华为云IOT平台MQTT协议订阅主题的格式:
格式: $oc/devices/{device_id}/sys/messages/down
//订阅主题: 平台下发消息给设备
$oc/devices/61df9a6bc7fb24029b0c160d_1126626497/sys/messages/down
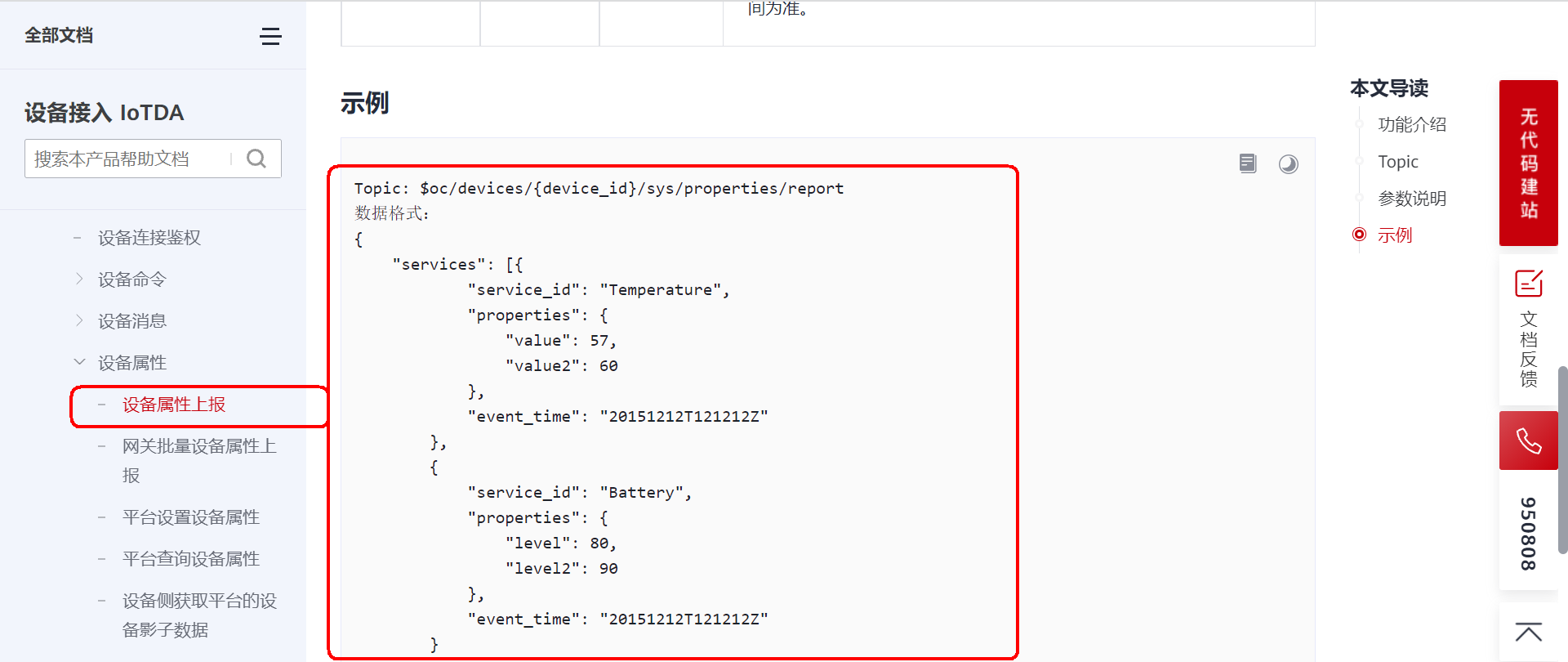
华为云IOT平台MQTT协议上报主题的格式:
格式: $oc/devices/{device_id}/sys/properties/report
//设备上报主题请求
$oc/devices/61df9a6bc7fb24029b0c160d_1126626497/sys/properties/report
//上报的数据格式如下
{"services": [{"service_id": "healthy","properties":{"HeartRate":127}},{"service_id": "healthy","properties":{"motion":2000}},{"service_id": "healthy","properties":{"temperature":36.2}}]}
打开MQTT客户端,填入对应数据,连接华为云物联网平台:
如需使用和我一样的同款软件,打开百度搜索MQTT客户端_v2.4(协议3.1.1).exe 即可找到下载地址。
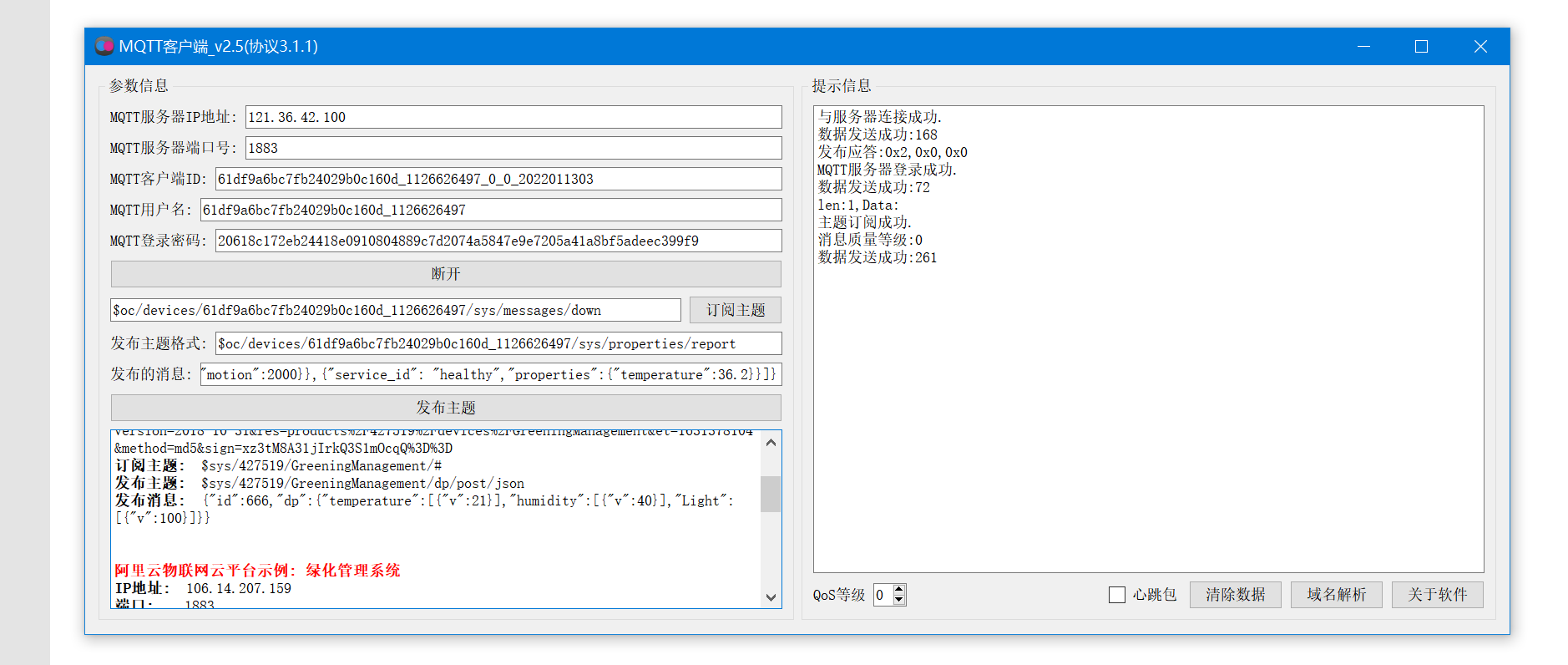
登录成功后,查看华为云页面,可以看到设备已经在线,并且上传的数据已经展示出来。

四、应用侧软件开发
4.1 功能介绍
为了更方便的展示设备数据,与设备完成交互,还需要开发一个配套的上位机,官方提供了应用侧开发的API接口、SDK接口,为了方便通用一点,我这里采用了API接口完成数据交互,上位机软件采用QT开发。
帮助文档地址: https://support.huaweicloud.com/usermanual-iothub/iot_01_0045.html
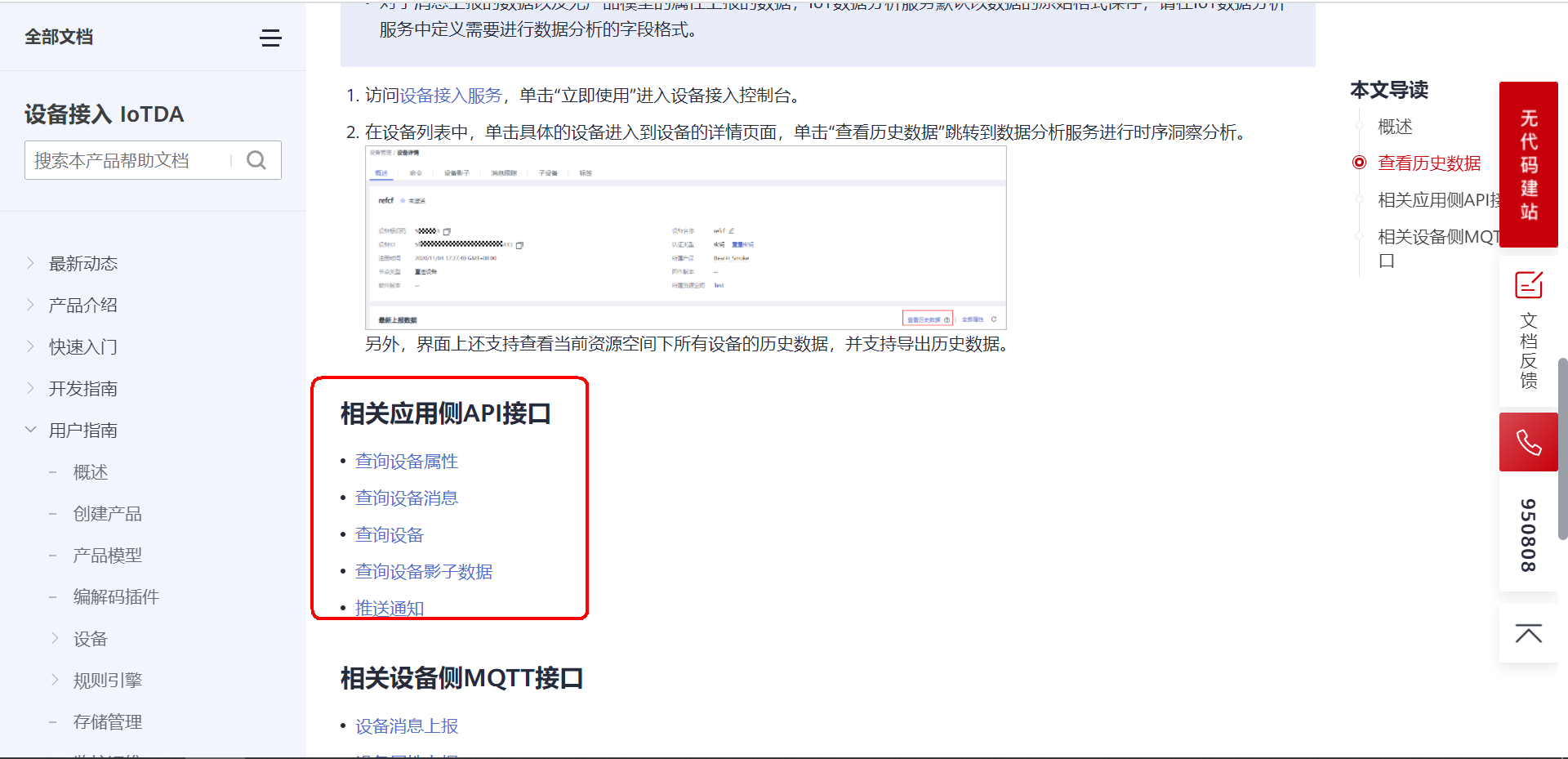
4.2 查询设备属性接口
设备属性就是设备上传的传感器状态数据信息,应用侧提供了API接口,可以主动向设备端下发请求指令;设备端收到指令之后需要按照约定的数据格式上报数据;所以,要实现应用层与设备端的数据交互,需要应用层与设备端配合才能完成。
下面分别介绍应用测和设备测的实现流程。
(1)应用层下发的指令
帮助文档地址: https://support.huaweicloud.com/api-iothub/iot_06_v5_0034.html
接口的在线调试地址: https://apiexplorer.developer.huaweicloud.com/apiexplorer/debug?product=IoTDA&api=ListProperties
如果请求参数和返回值不清楚,写代码前,先使用在线调试接口体验一下,验证数据交互是否OK。
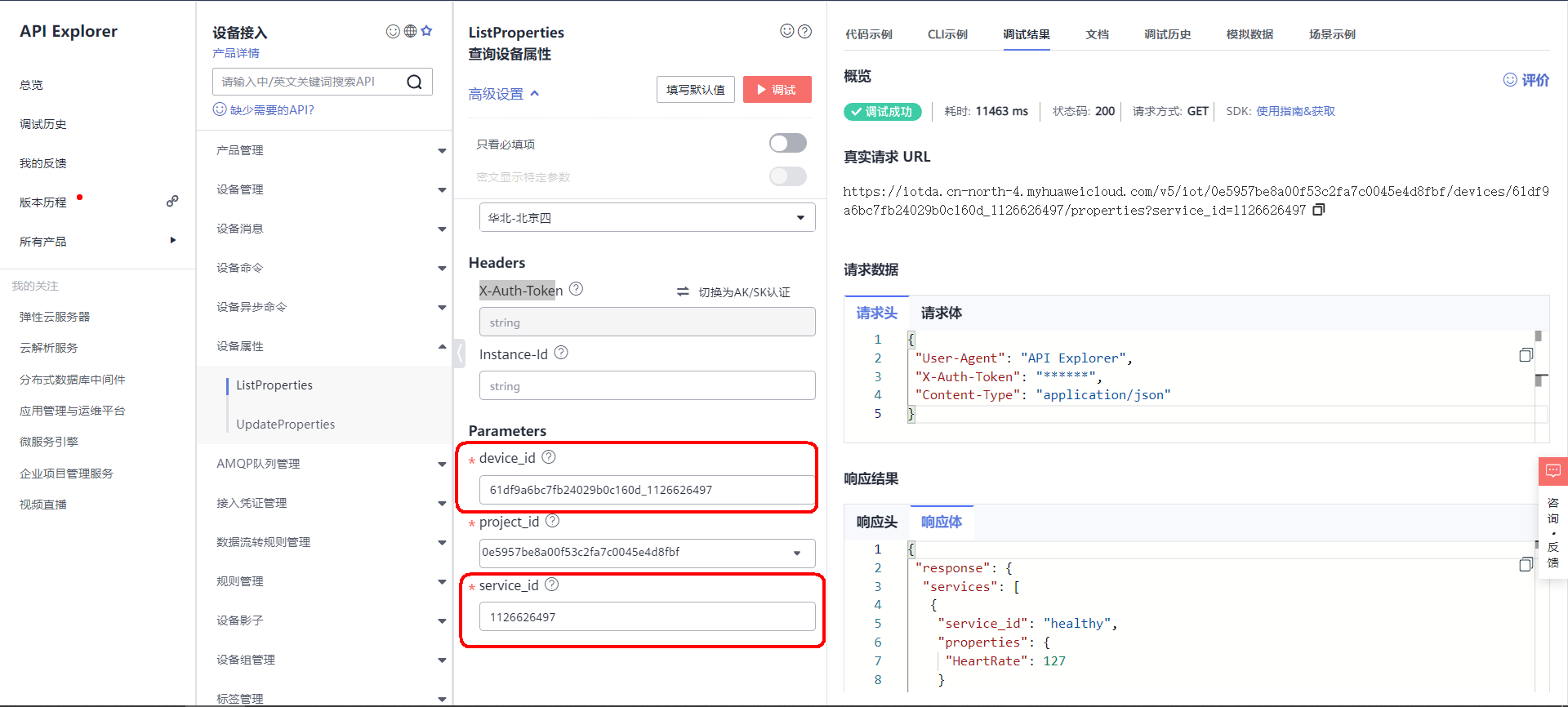
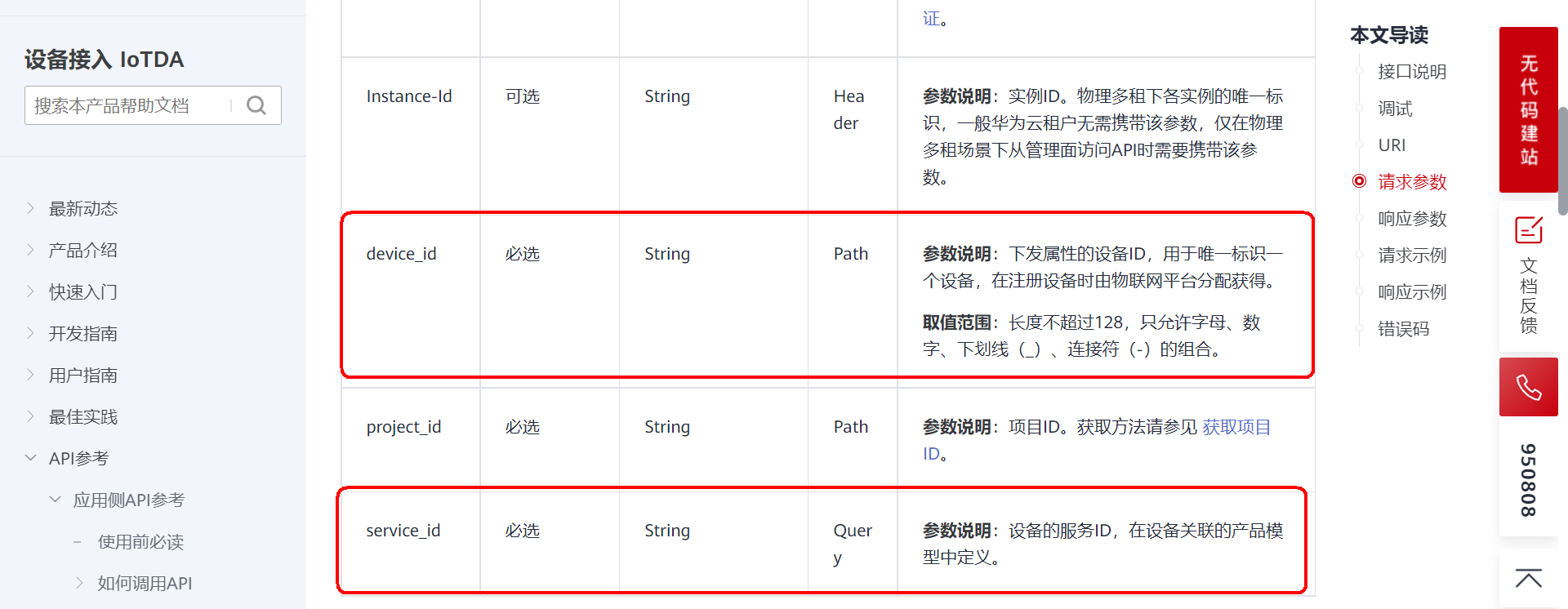
请求参数里比较总要的两个必填参数,是设备ID和服务ID,这两个参数在第3章节就介绍过如何获取了,在产品页面创建自定义属性时可以看到服务ID。
请求接口总结:
请求方法 GET
URI地址 /v5/iot/{project_id}/devices/{device_id}/properties
传输协议 HTTPS
拼接好的地址:
https://iotda.cn-north-4.myhuaweicloud.com/v5/iot/0e5957be8a00f53c2fa7c0045e4d8fbf/devices/61df9a6bc7fb24029b0c160d_1126626497/properties?service_id=1126626497
其中的project_id和device_id需要根据自己的设备信息修改。
请求头:
{
"User-Agent": "API Explorer",
"X-Auth-Token": "******", 这个是鉴权用的token
"Content-Type": "application/json"
}
响应体(设备上传的数据)
{
"response": {
"services": [
{
"service_id": "healthy",
"properties": {
"HeartRate": 127
}
},
{
"service_id": "healthy",
"properties": {
"motion": 2000
}
},
{
"service_id": "healthy",
"properties": {
"temperature": 36.2
}
}
]
}
}
请求头里需要填X-Subject-Token参数,这个参数只要是访问任何华为云都需要填,获取具体的流程可以看这里。https://bbs.huaweicloud.com/blogs/317759 翻到第3小节。
(2)设备上传数据
应用层向设备端请求查询设备属性时,设备端会收到如下的消息:
$oc/devices/61df9a6bc7fb24029b0c160d_1126626497/sys/properties/get/request_id=336bcb57-0e0a-44d0-90f7-31386cb54a3c{"service_id":"1126626497"}
这个消息里有一个主要参数request_id请求ID,设备端需要解析出这个参数,给应用层响应数据时,需要带上这个ID。
这个请求属性详细帮助文档看这里: https://support.huaweicloud.com/api-iothub/iot_06_v5_3011.html
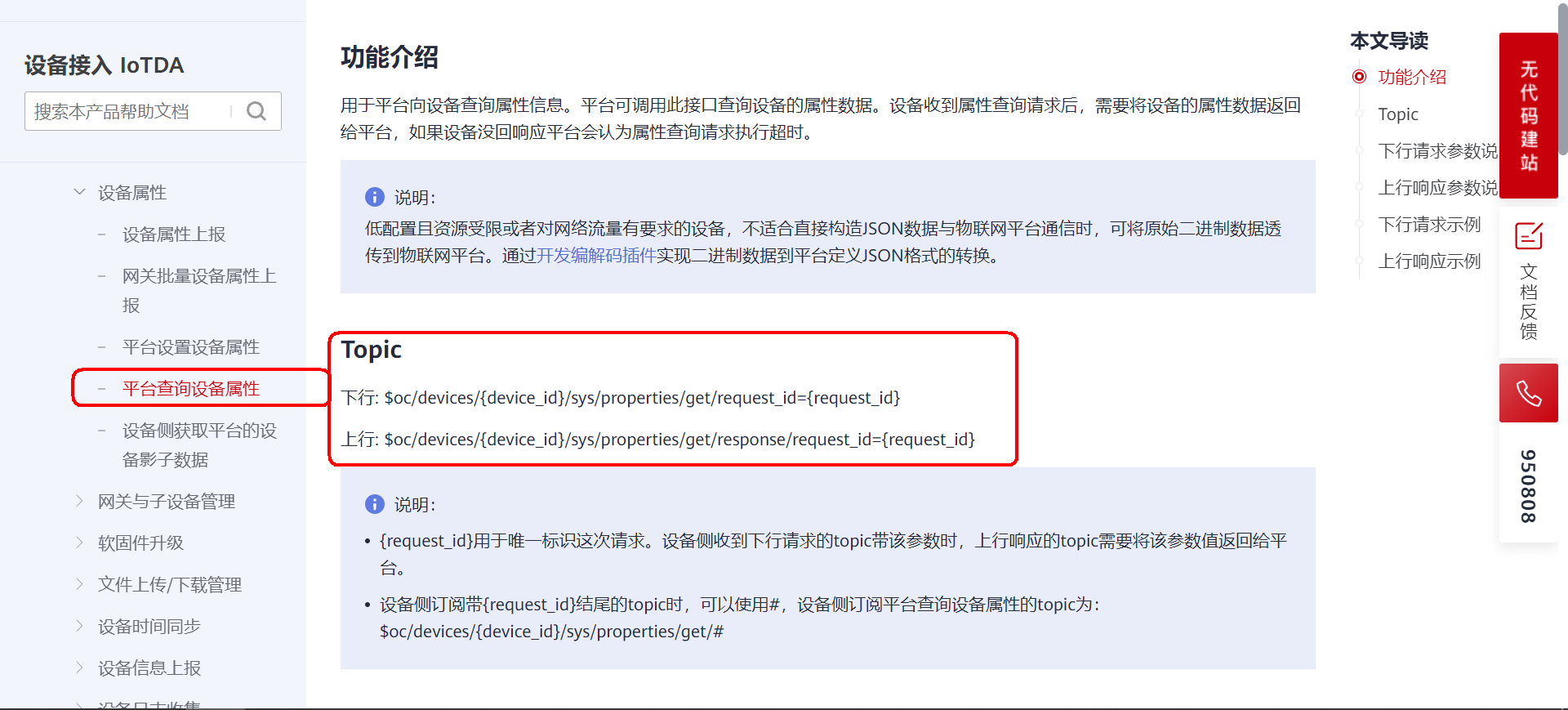
设备响应的数据格式:
主题格式: $oc/devices/{device_id}/sys/properties/get/response/request_id={request_id}
示 例:
$oc/devices/61df9a6bc7fb24029b0c160d_1126626497/sys/properties/get/response/request_id=336bcb57-0e0a-44d0-90f7-31386cb54a3c
响应的数据格式:
{"services": [{"service_id": "healthy","properties":{"HeartRate":127}},{"service_id": "healthy","properties":{"motion":2000}},{"service_id": "healthy","properties":{"temperature":36.2}}]}
响应的数据格式可以看这里的介绍: https://support.huaweicloud.com/api-iothub/iot_06_v5_3010.html
4.3 在线API调试结合设备模拟
下面使用MQTT客户端与在线API接口联合模拟一下接口效果:
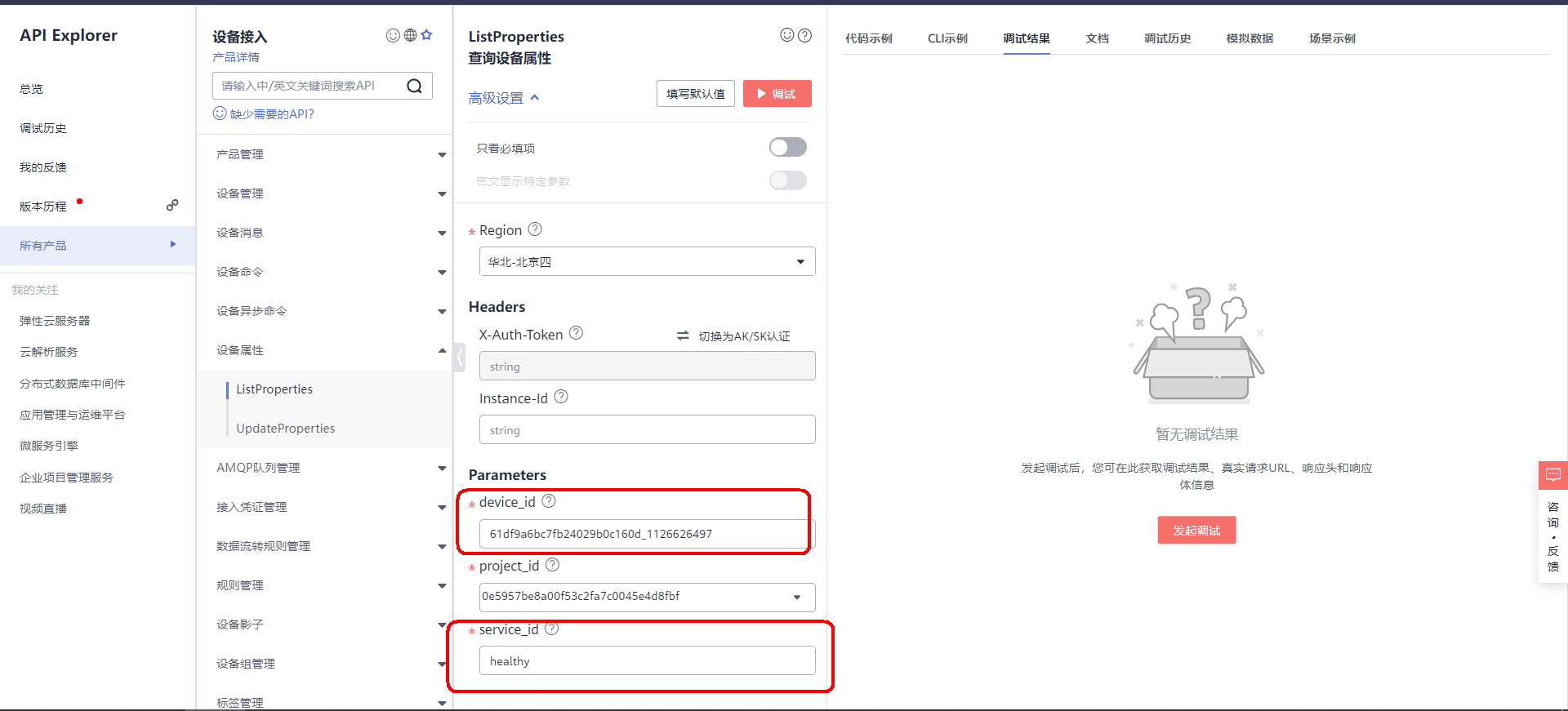
(1)先打开调试页面: https://apiexplorer.developer.huaweicloud.com/apiexplorer/debug?product=IoTDA&api=ListProperties
然后填好设备DI和服务ID:
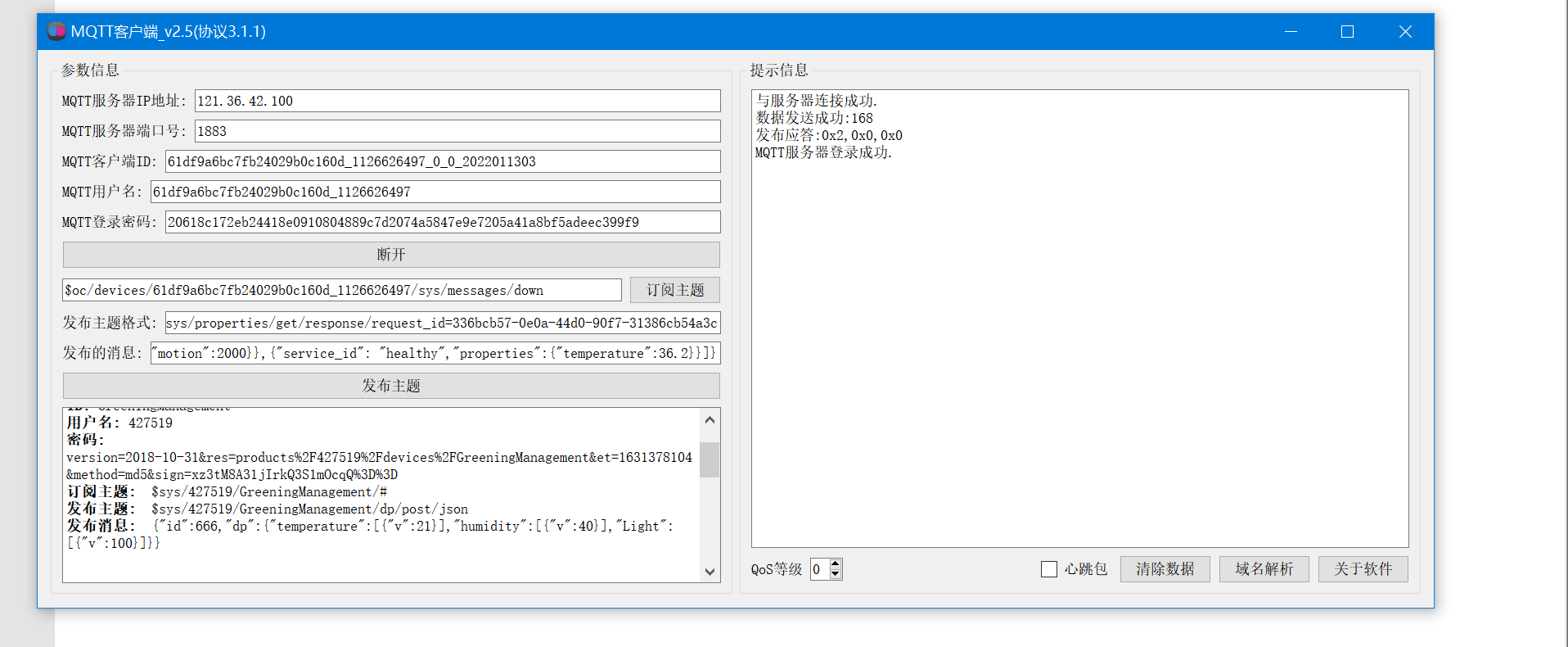
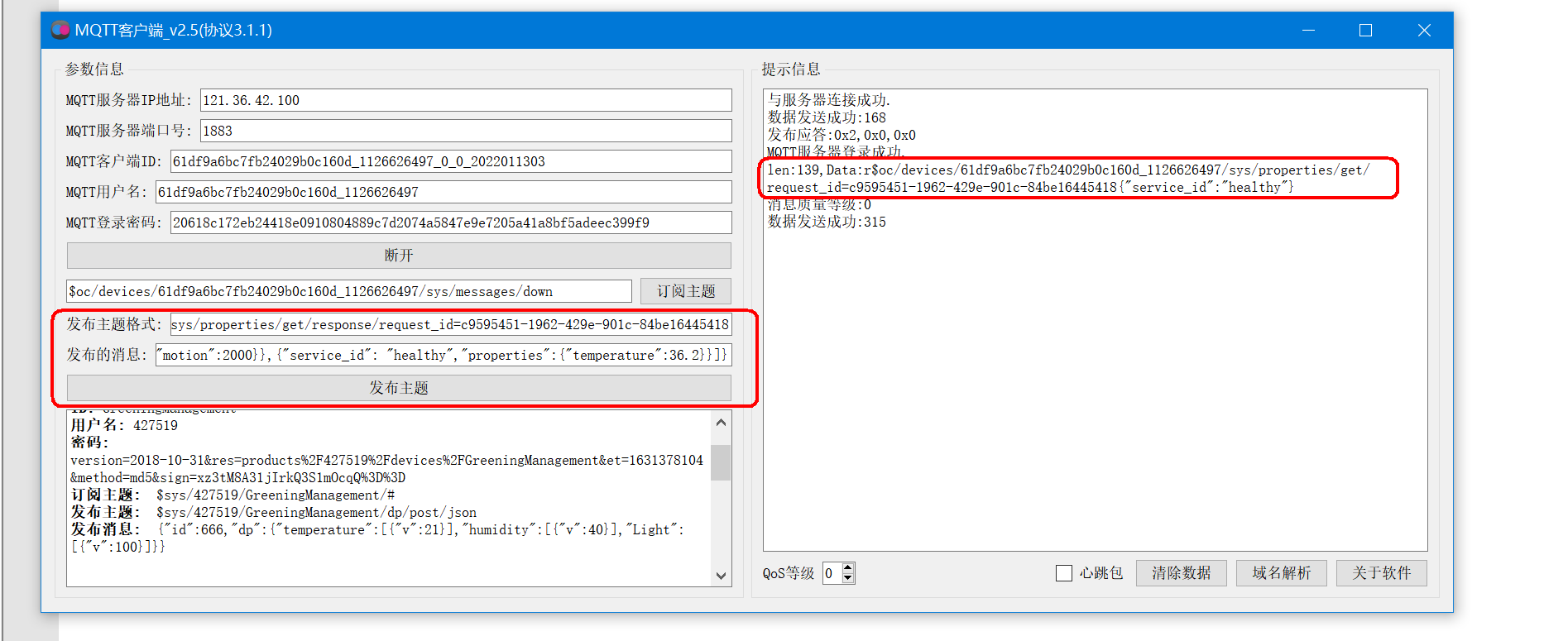
(2)、打开MQTT客户端,登录华为云物联网平台(也就是模拟设备上线):
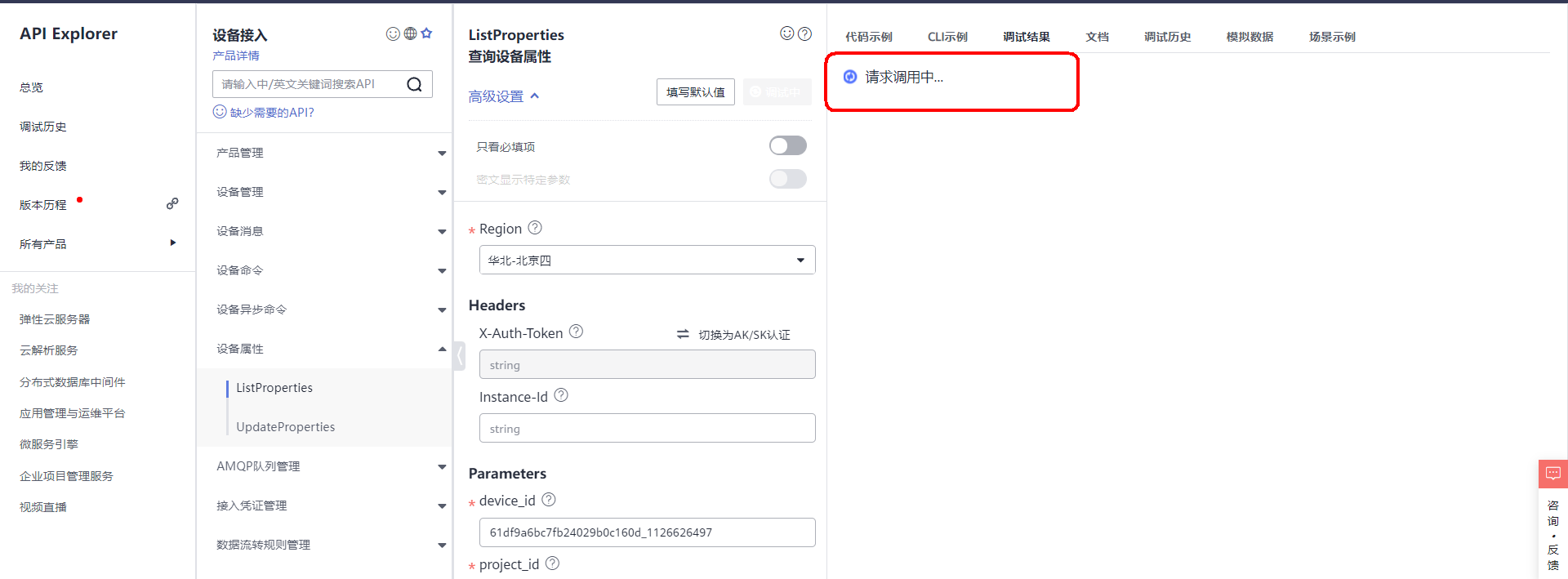
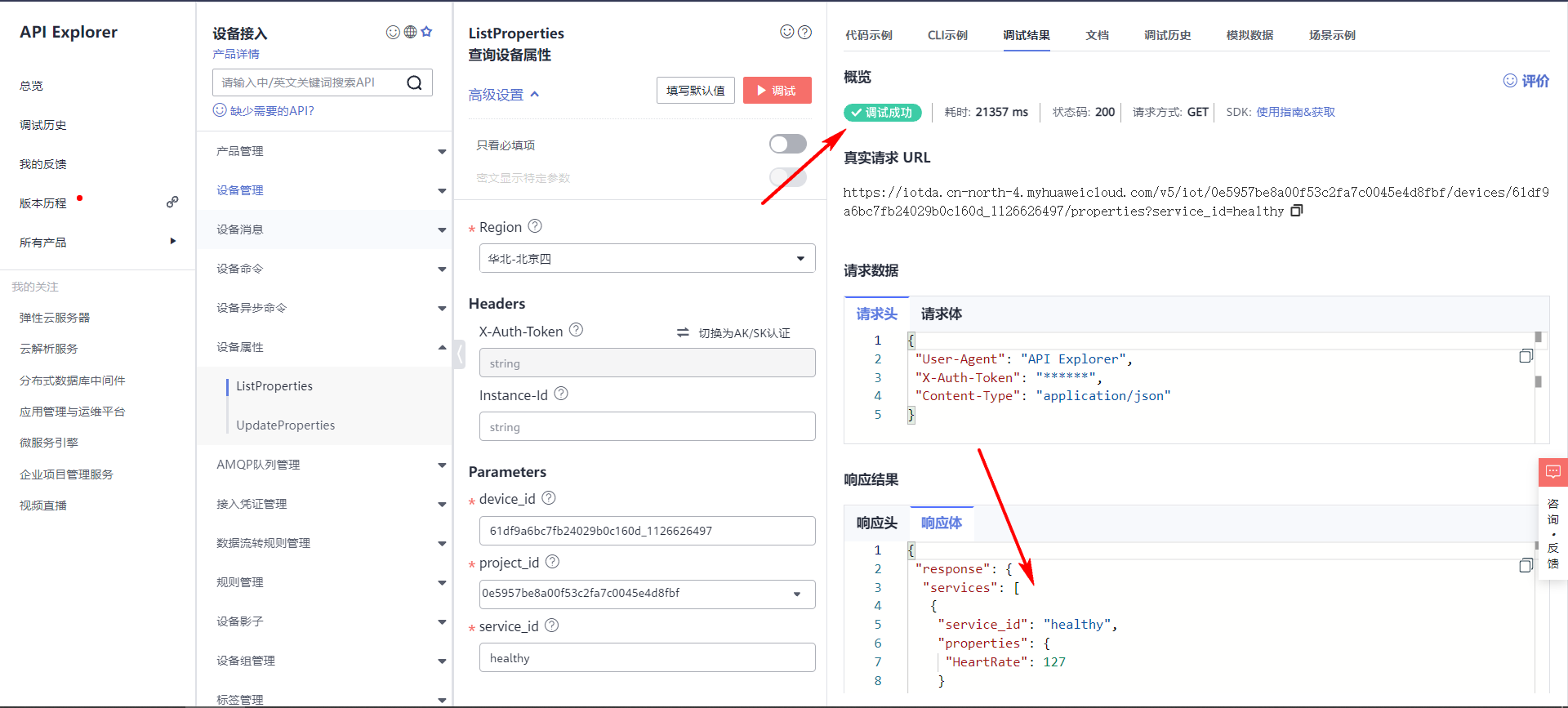
(3)、打开在线API调试页面,点击调试: 点击后可以看到页面上已经在等待客户端的响应了。
(4)、MQTT客户端响应详细
按照前面说的响应格式,拼接好接口,数据。然后发布主题。
(5)、应用层收到客户端响应,调试成功
调试成功后,响应体里收到的就是设备端上传的设备属性数据。
4.4 应用层核心代码
/*
功能: 获取token
*/
void Widget::GetToken()
{
//表示获取token
function_select=3;
QString requestUrl;
QNetworkRequest request;
//设置请求地址
QUrl url;
//获取token请求地址
requestUrl = QString("https://iam.%1.myhuaweicloud.com/v3/auth/tokens")
.arg(SERVER_ID);
//自己创建的TCP服务器,测试用
//requestUrl="http://10.0.0.6:8080";
//设置数据提交格式
request.setHeader(QNetworkRequest::ContentTypeHeader, QVariant("application/json;charset=UTF-8"));
//构造请求
url.setUrl(requestUrl);
request.setUrl(url);
QString text =QString("{"auth":{"identity":{"methods":["password"],"password":"
"{"user":{"domain": {"
""name":"%1"},"name": "%2","password": "%3"}}},"
""scope":{"project":{"name":"%4"}}}}")
.arg(MAIN_USER)
.arg(IAM_USER)
.arg(IAM_PASSWORD)
.arg(SERVER_ID);
//发送请求
manager- >post(request, text.toUtf8());
}
//查询设备属性
void Widget::Get_device_properties()
{
//表示获取token
function_select=0;
QString requestUrl;
QNetworkRequest request;
//设置请求地址
QUrl url;
//获取token请求地址
requestUrl = QString("https://iotda.%1.myhuaweicloud.com/v5/iot/%2/devices/%3/properties?service_id=%4")
.arg(SERVER_ID)
.arg(PROJECT_ID)
.arg(device_id)
.arg(service_id);
//自己创建的TCP服务器,测试用
//requestUrl="http://10.0.0.6:8080";
//设置数据提交格式
request.setHeader(QNetworkRequest::ContentTypeHeader, QVariant("application/json"));
//设置token
request.setRawHeader("X-Auth-Token",Token);
//构造请求
url.setUrl(requestUrl);
request.setUrl(url);
//发送请求
manager- >get(request);
}