

运动控制行业深度:高端装备“大脑”,机器人孕育新空间
描述
▍摘要
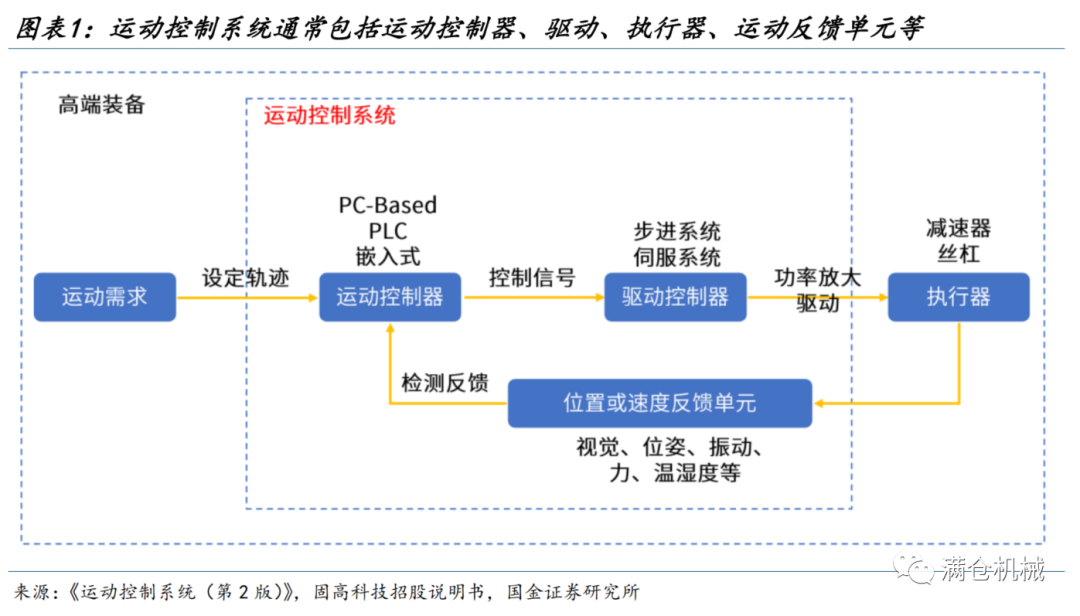
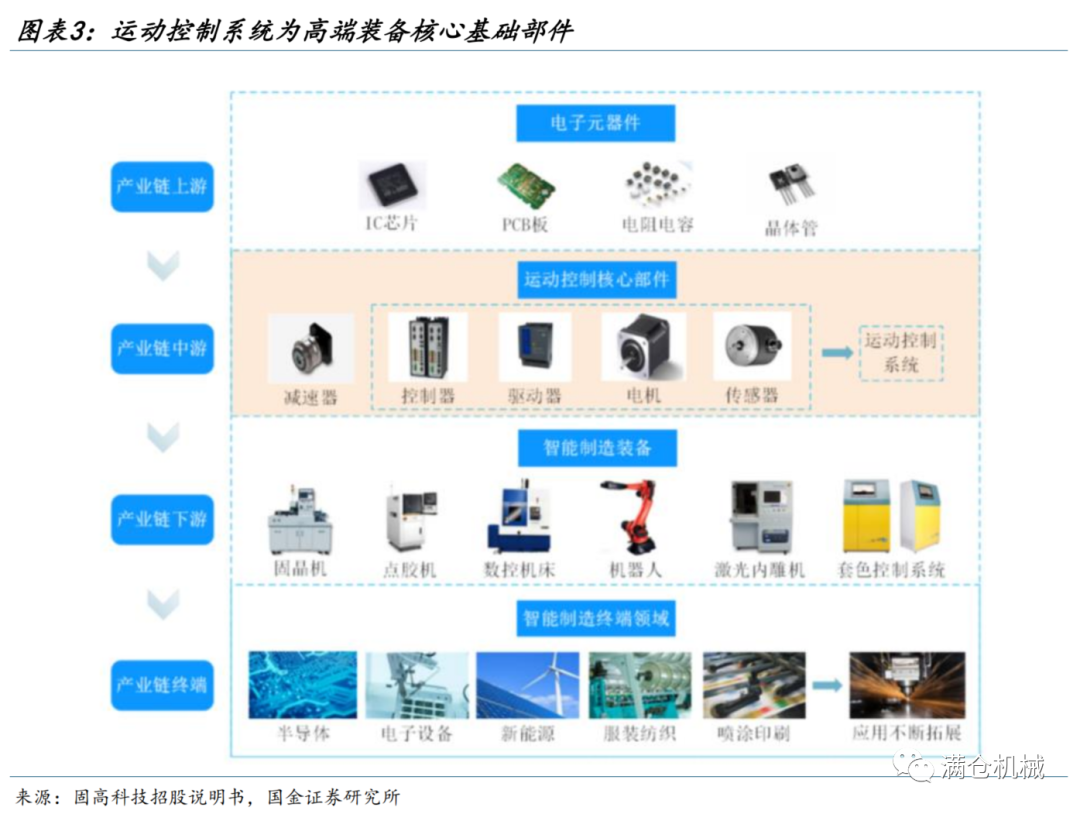
运动控制器+执行器(驱动电机)+传感器构成运动控制系统,是数控机床、机器人等高端装备的核心基础部件:运动控制主要指按照运动轨迹要求,在复杂条件下把规划指令变成期望的机械运动,通过执行器(通常由伺服驱动+电机构成)实现驱动,并通过传感器完成闭环反馈。运动控制系统是高端装备的核心基础部件,决定了装备的精度、效率,同时其也是不同品牌高端装备形成差异化竞争的重要构成。
运动控制器为运动控制系统“大脑”,通用运动控制器主要分为PLC、嵌入式、PC-Based三大类:运动控制器主要任务是根据运动控制的要求和传感器件的信号进行必要的逻辑、数学运算,为电机或其它动力和执行装置提供正确的控制信号,性能直接决定了运动控制系统的性能水平。
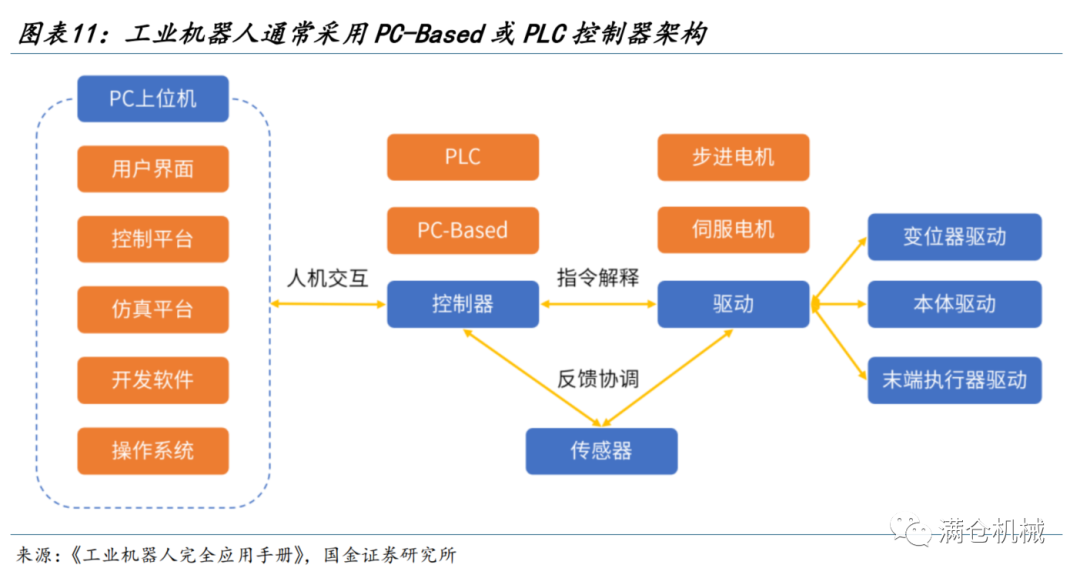
工业机器人通常采用PC作为上位机完成人机交互/轨迹规划,基于PLC或PC-Based控制器通过关节控制、位置控制、力控制实现运动控制:工业机器人通常采用PC作为上位机完成人机交互和轨迹规划,确定运动控制参数,再通过单/多关节控制(由电机驱动,电流、速度、位置检测实现闭环),位置控制(可通过笛卡尔位置控制在关节控制基础上实现),力控制(采用多维力传感器获取笛卡尔坐标系中的力信息实现反馈)实现运动控制,最终经过电机驱动,经过齿轮组、减速器等为关节提供动能,通过关节速度、位置、力控制实现多自由度运动。
人形机器人在工业机器人基础上进一步强调“类人”属性,步态控制、手臂控制、轨迹规划要求均更高,难度预计将显著提升,有望带来市场需求增量:人形机器人采用“类人”结构,步行状态下的运动控制系统属于非线性和强耦合,易受环境因素干扰,假设髋关节、膝关节、踝关节分别为3/1/3个自由度,仅下肢就为一个14自由度系统,多关节联动控制难度较高。在手臂控制除多关节联动带来的难度外,其“类人”属性对于冲击(代表力矩变化的快慢,影响振动、机械磨损等因素)控制的要求更高,以实现平稳的抓取和抬举物品,并且为了实现与环境交互,需要引入视觉传感器来完成空间定位实现轨迹规划。更多的联动关节数量、更多的传感器都将加大运动控制难度,同时在工业机器人应用中,轨迹规划的应用需要专业工程师通过编程处理,学习成本较高,考虑人形机器人未来有消费级应用场景,轨迹规划必须通过软件进行封装,将功能集成并设计出可视化界面,从而降低使用门槛。
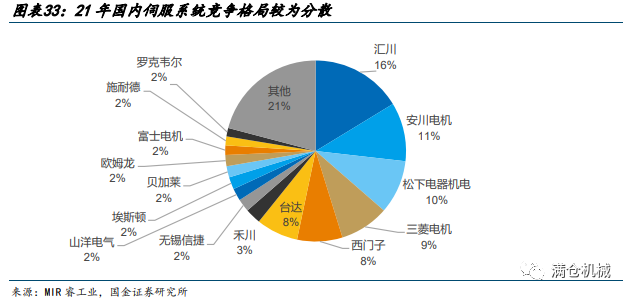
运动控制22年全球市场空间155亿美元,19年国内市场空间425亿元人民币,中高端运动控制市场以海外品牌为主,国内企业在各自领域已实现一定突破:根据MARKETS AND MARKETS数据,22年全球运动控制市场空间155亿美元,预计到27年达到200亿美元,CAGR5.2%。根据固高科技招股说明书数据,19年国内运动控制系统市场规模425亿元人民币,其中运动控制器、伺服系统市场规模分别为85/340亿元人民币。目前高性能运动控制及伺服系统市场参与者主要为海外厂商如欧姆龙、倍福、ACS、Aerotech等,国内企业分别在运动控制器、伺服驱动器等领域也实现了一定突破,根据雷赛智能招股说明书数据,通用运动控制器中的PC-Based控制卡市场,固高科技、雷赛智能、成都乐创、众为兴为代表的国内品牌占据了70%以上的市场份额;根据睿工业数据,21年汇川技术、禾川科技伺服市场占有率分别达到了16.3%/2.8%实现突破,但仍有较大国产替代空间。
▍正文
1
运动控制为数控机床、机器人等高端装备“大脑”
1.1运动控制系统是数控机床、机器人等高端装备高效运行核心环节
运动控制系统是依照具体的运动轨迹要求,根据负载情况,通过驱动器、驱动执行电机完成相应运动轨迹要求的系统。通常包括运动控制器、驱动、执行器、运动反馈单元等。
运动控制系统是依照具体的运动轨迹要求,根据负载情况,通过驱动器、驱动执行电机完成相应运动轨迹要求的系统。通常包括运动控制器、驱动、执行器、运动反馈单元等。
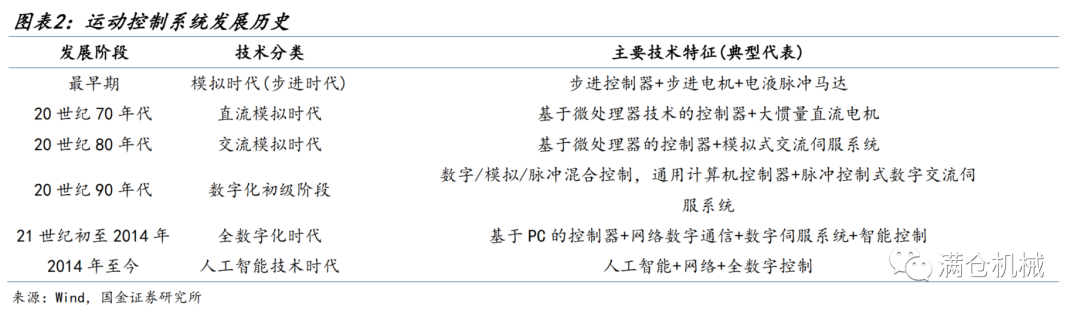
运动控制系统经过多年发展,目前普遍以基于计算机的数字控制为基础,在云计算、工业互联网、人工智能等新技术加持下,运动控制系统的智能化、柔性化、控制精度等各方面能力均快速提升。
运动控制系统属于国家战略物资,对于数控机床、机器人及各类高端装备高质高小运行至关重要,运动系统的智能化控制是装备领域和制造行业的核心技术,决定了装备的精度、效率。
1.2 运动控制器为运动控制开始,通用运动控制器分为 PLC 控制器、嵌入式控制器、PC-based 控制卡
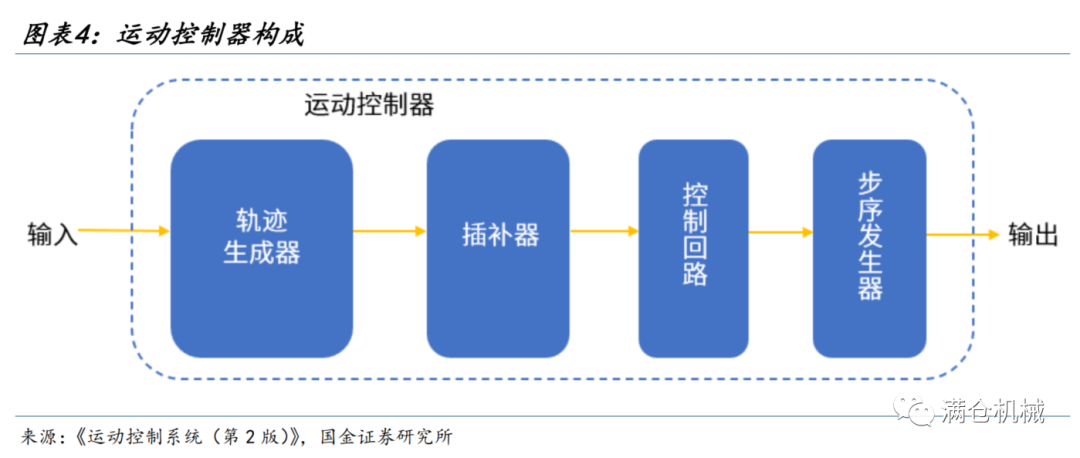
运动控制器由轨迹生成器、插补器、控制回路和步序发生器四部分构成。首先由轨迹生成器计算出任务希望的理想轨迹,插补器根据位置或速度反馈单元的实际状态,按照轨迹生成器的要求,计算出驱动单元下一步将要执行的命令,然后交由控制回路进行精确控制。如果是步进电机,则还有一部分就是步序发生器,步序发生器根据控制回路控制指令进一步生成控制相序和脉冲,达到控制运动对象的目的。
运动控制器的硬件按照核心器件组成包括基于微处理器(MCU)、专用芯片(ASIC)、PC-Based、数字信号处理芯片(DSP)、可编程逻辑控制器(PLC)、多核处理器等。随着技术的进步和完善,运动控制器从以单片机、微处理器或专用芯片作为核心处理器,发展到以 DSP 和FPGA 作为核心处理器的通用开放式运动控制器。
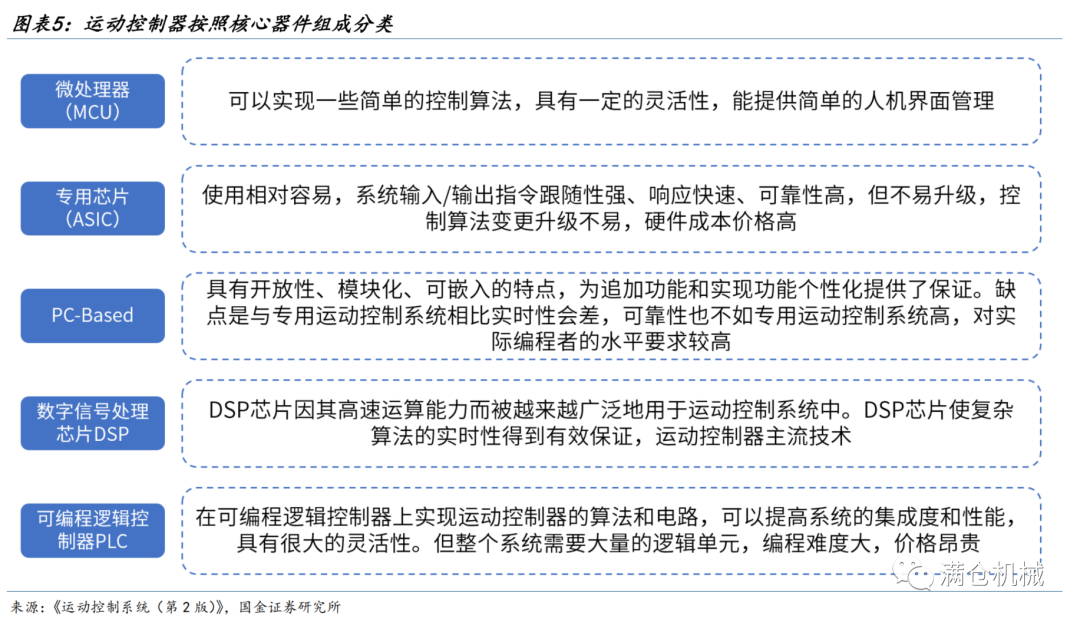
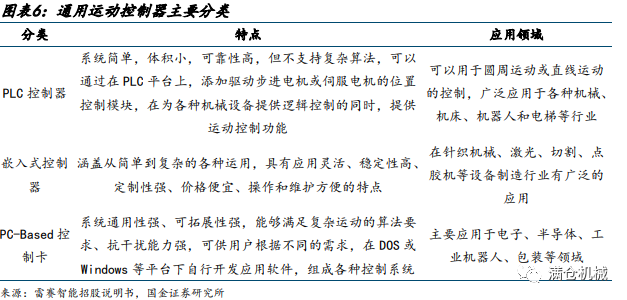
根据平台不同,通用运动控制器可以分为 PLC 控制器、嵌入式控制器和 PC-Based 控制卡三大类。
1.3 运动控制器+执行器(驱动电机)+传感器构成了主流运动控制系统
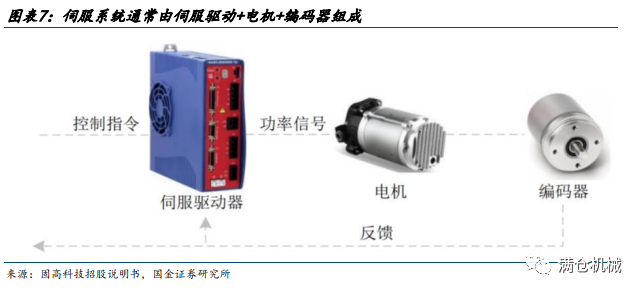
伺服系统是一种能对机械运动按预定要求进行自动控制的系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角),实现输出变量精确跟随或复现输入变量。
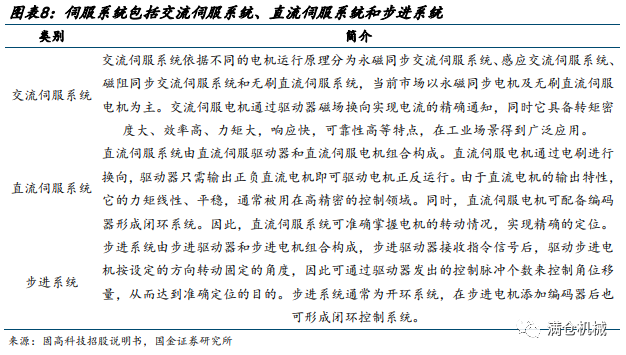
伺服系统目前主要包括交流伺服系统、直流伺服系统和步进系统三类。
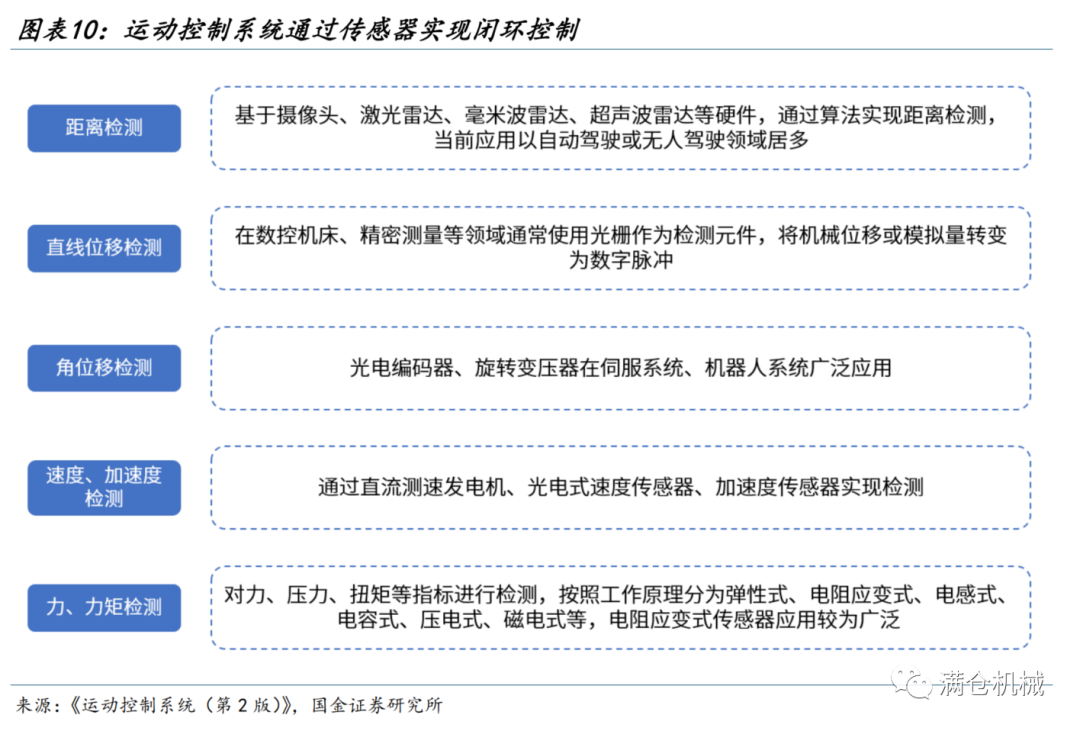
为实现高速度、高精度运动控制,伺服系统需对距离、位移、速度、加速度(力)、角度、角速度、角加速度等参数进行检测,并通过实时监测实现闭环反馈,需要与传感器进行配套使用。

常见传感器包括光栅尺(直线位移检测)、编码器(角位移检测)、激光雷达/视觉检测(距离检测)、电阻应变式传感器(力矩检测)等。
2
人形机器人运动控制难度预计将显著加大,有望带来市场需求增量
2.1 工业机器人通常采用 PC 作为上位机完成人机交互/轨迹规划,基于 PLC 或 PC-Based控制器通过关节控制、位置控制、力控制实现运动控制
工业机器人广泛应用于工业自动化领域,控制系统是机器人的核心部分,其功能强弱、性能优劣直接影响机器人的最终性能。通常采用 PC 上位机+专用运动控制器的架构,以 PC为上位机完成人机交互和运动轨迹规划,重点设计了基于DSP和FPGA的专用运动控制器,其中 DSP 完成机器人运动控制任务的调度,实现对机器人关节空间的实时控制,FPGA 则用于控制系统所需各功能接口的设计。实现了直角坐标空间的机器人轨迹规划和速度控制,具备直线和圆弧基本轨迹插补算法及 S 形曲线加减速算法,改善机器人前端运动的平稳性。
轨迹规划直接决定了机器人的运动方式。轨迹规划为基于工作任务和机器人性能,求解机器人位姿等运动量关于时间的函数,输入为期望轨迹、运动学和动力学参数,输出机器人各关节或末端执行器的运动量,包括位移、速度、加速度等的时间序列。
工业机器人机器人轨迹规划一般分为基本轨迹规划和最优轨迹规划,其中基本轨迹规划分为笛卡尔空间规划和关节空间规划。
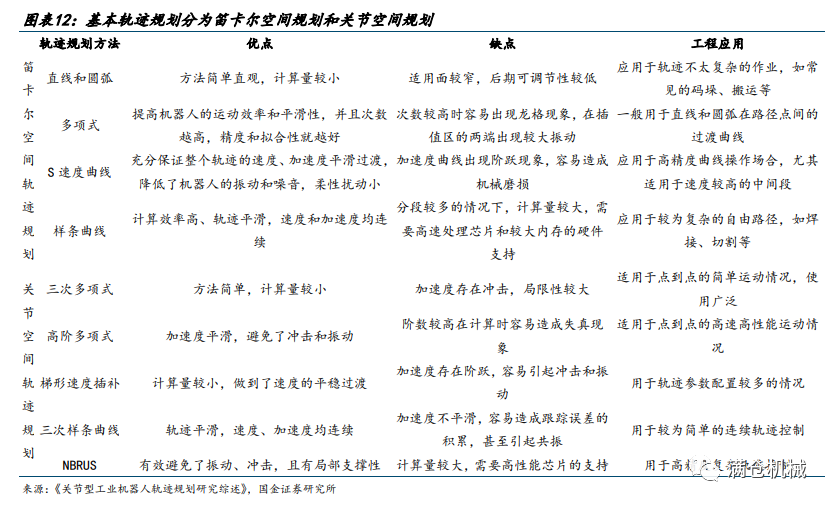
最优轨迹规划通常考虑效率、能量小号、平稳性等因素,找到每种工况环境需要的最优轨迹规划方案:
01
时间最优规划
最常见的最优轨迹规划需求,通常通过运动学或动力学约束寻找最优解;运用遗传算法等各种优化算法来求解最优解;将时间模型转化为其他更为通用的模型。
02
能量最优规划
一方面试图寻找出最平滑的轨迹来减少关节间的能量损耗,另一方面也通过优化整个动力系统来达到能量分配最优。
03
冲击最优规划
旨在找到使机器人冲击最小的轨迹,其目的一方面是为了减小机器人在运动过程中的冲击,在很大程度上可以减小轨迹跟踪的误差,另一方面可以大大减少机器人因为冲击过大而产生的共振、抖动、机械磨损、使用寿命缩减等缺陷,使机器人能够稳定平顺运行。
04
混合最优轨迹规划
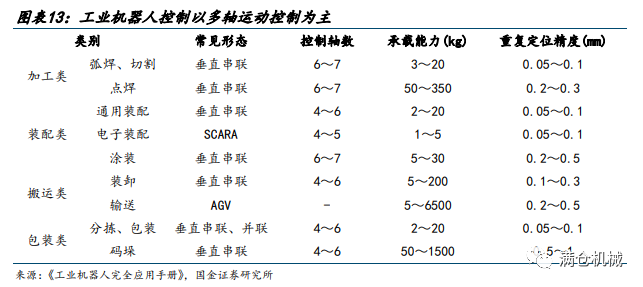
综合考虑两种或以上最优性优化方案,其中时间-能量最优轨迹研究开展时间最长,也是工业生产中要求最高的两项指标。工业机器人根据不同的结构形态、用途、作业要求等不同有较多分类,但控制上以多轴实时运动控制为主,基于关节控制、位置控制、力控制完成作业任务。
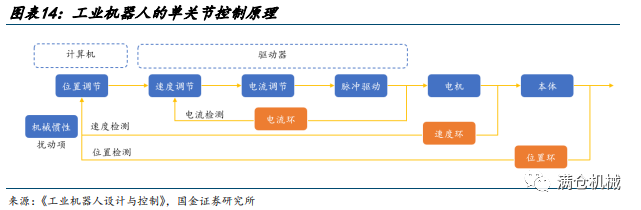
1)关节控制:关节控制为工业机器人最基础和核心的控制过程,单关节控制不考虑关节之间的影响,机器人的机械惯性被当做扰动项来进行处理,通常通过电机实现驱动,由电流检测、速度检测、位置检测构成闭环控制。
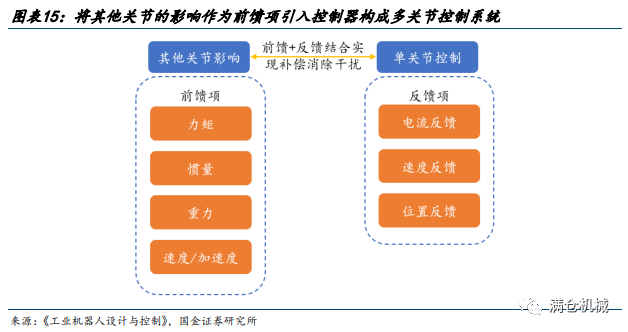
多关节控制在单关节的基础上要考虑关节之间的影响,通常将其他关节的对当前关节的影响作为前馈项引入位置控制器,从而构成多关节控制系统。
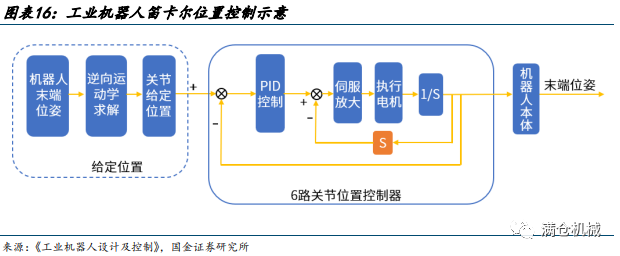
2)位置控制:工业机器人位置控制与关节空间轨迹有紧密联系,以六自由度工业机器人为例,可通过笛卡尔位置控制由给定位置、关节空间位置转换、6 路单关节位置控制器实现工业机器人末端按照给定的位置和姿态运动。
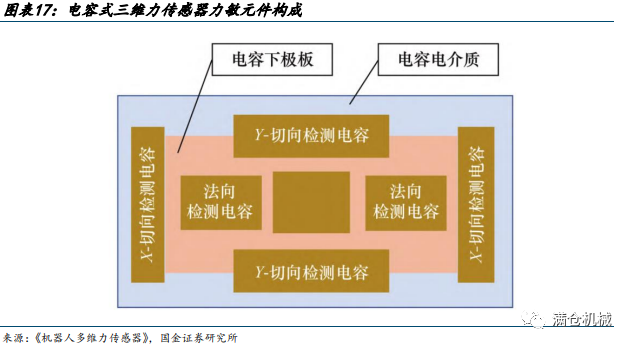
3)力控制:采用多维力传感器获取笛卡尔坐标系中的多维力、力矩信息,多维力传感器主要由力敏元件、信号采集电路、信号调理电路、多维信号解耦系统(硬件或软件解耦)、上位机或嵌入式系统信息处理软件等构成。
多维力传感器广泛装配在机器人机械臂。在工业现场生产线中,将多维力传感器装载于小型机械臂的前端或者机械手爪末端。协助机器人手臂实现力度的控制、轮廓追踪、孔位搜索以及机械臂防碰撞等功能,保障机器人操作安全与功能实现。
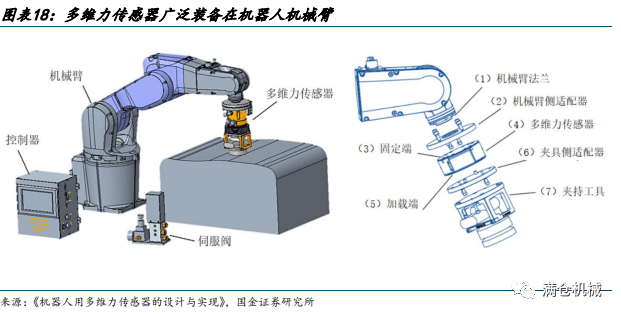
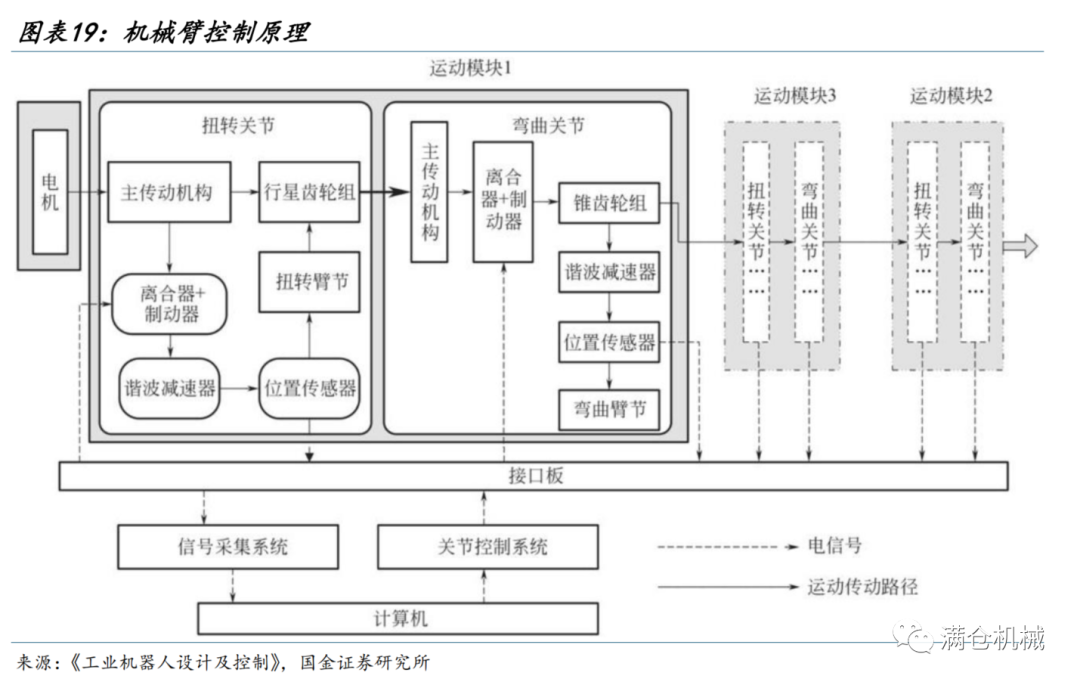
以机械臂控制为例,每个关节均含有离合器、制动器、谐波减速器,以电机为动力源,经齿轮组、减速器为关节提供动能,通过对关节速度、位置、力进行调节,完成多自由度旋转运动。
2.2 人形机器人强调“类人”属性,步态控制、抗冲击、轨迹规划要求均更高,难度显著提升
2.2.1 下肢控制:步行运动控制难度较高
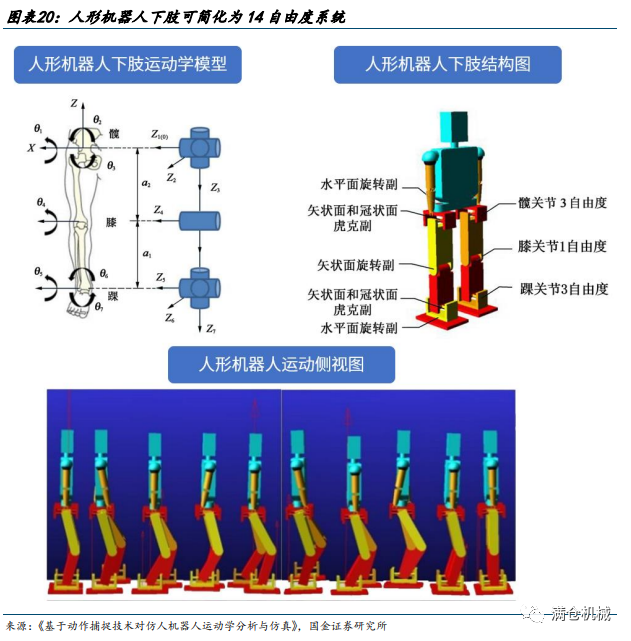
人形机器人由于采用了“类人”腿部结构,步行状态下的运动控制系统属于非线性和强耦合,人形机器人需保持步行稳定同时按照期望的轨迹行走,同时存在在地面不平整、路面障碍物的干扰,控制难度较高。根据《基于动作捕捉技术对仿人机器人运动学分析与仿真》信息,人形机器人下肢可简化为 14 自由度系统,其中,髋关节为 3 个自由度,分别为横滚、俯仰和偏转,通过 1 个虎克副和 1 个旋转副来连接;同样的传动方式也作用于踝关节的 3 个自由度,每个膝关节 1个前向自由度,通过 1 个旋转副连接。
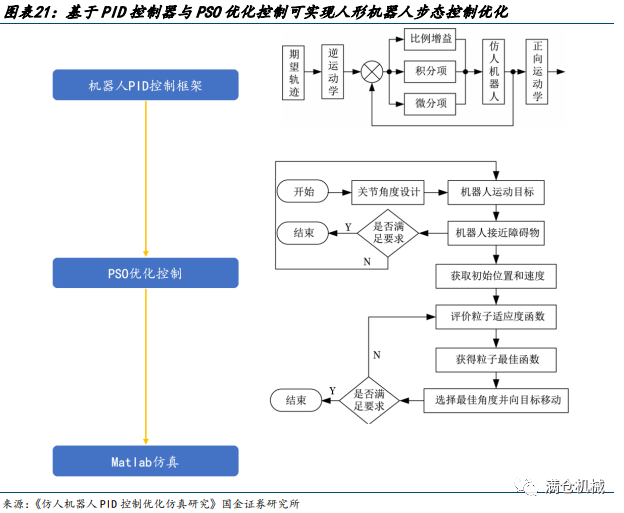
目前人形机器人的步态控制一种方式为基于具有反馈机制的控制回路 PID 控制器,通过PSO 计算进行控制优化。优化后可通过 Matlab 仿真对于控制系统的响应速度、机器人跟踪路径是否有改善进行验证。
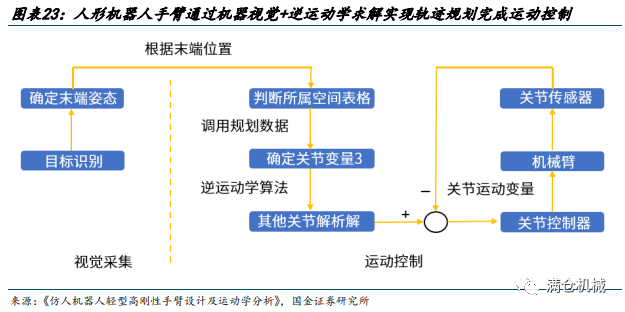
2.2.2 手臂控制:视觉前馈+逆运动学求解实现轨迹规划,“类人”属性对于冲击等指标要求更高
以一个四自由度双臂人形机器人为例,其运动控制系统包含机械臂与伺服电机及控制器,机械臂在肩部含有两个自由度、肘部含有两个自由度。
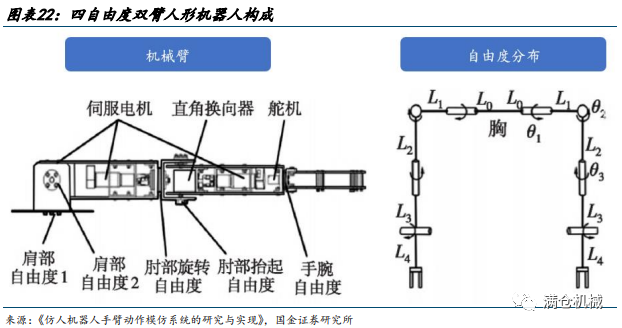
机械臂控制类似工业机器人多关节控制,以肩关节作为坐标系原点,通过机器视觉确定机械臂末端姿态与需要达到的定位,再通过逆运动学算法求解得到关节变量的解析解,最后控制各关关节以“类人”姿态完成作业任务。
冲击(Jerk)为机器人运动过程中加速度的导数,代表力矩变化的快慢,冲击会产生振动、过冲、机械磨损和寿命减少等问题。考虑人形机器人的机械臂有“类人”属性,在操作上需要平稳地进行抓取和抬举物品,对于实现最小冲击要求更高。
2.2.3 轨迹规划:对于轨迹规划算法的集成化、智能化、可视化要求更高
人形机器人要实现“类人”行为,自由度相比工业机器人更高,传感器的应用也会明显增加,例如需要引入视觉传感以实现与环境交互和空间定位(用于轨迹规划)。在工业机器人应用中,轨迹规划的应用往往需要专业工程师通过编程处理,学习成本较高。考虑人形机器人未来有消费级应用场景,轨迹规划必须通过软件进行封装,将功能集成并设计出可视化界面,从而降低使用门槛。

3
全球市场空间155亿美元,国内市场空间425亿元人民币
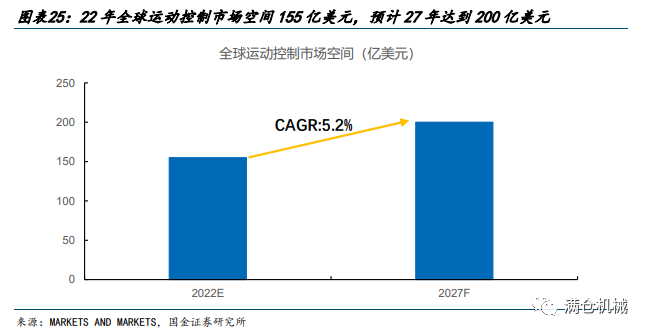
3.1 运动控制 22 年全球市场空间 155 亿美元,预计 27 年达到 200 亿美元
根据 MARKETS AND MARKETS 数据,22 年全球运动控制市场空间 155 亿美元,预计到 27 年达到 200 亿美元,期间复合增速 5.2%。增长主要来自于工业机器人需求持续增长、工业4.0 持续发展等。
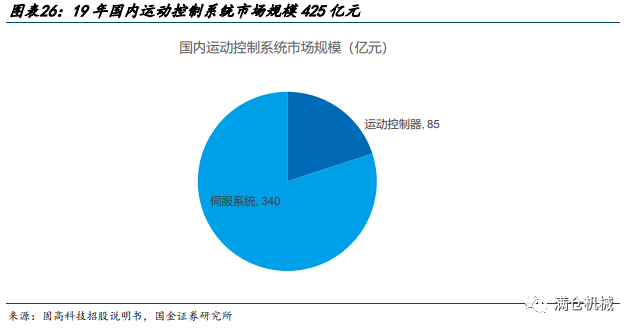
3.2 国内运动控制市场规模 19 年达到 425 亿元,后续有望保持高增长
根据固高科技招股说明书数据,2019 年中国运动控制系统的总体市场规模为 425 亿元,其中运动控制器市场规模 85 亿元,伺服系统市场规模 340 亿元。
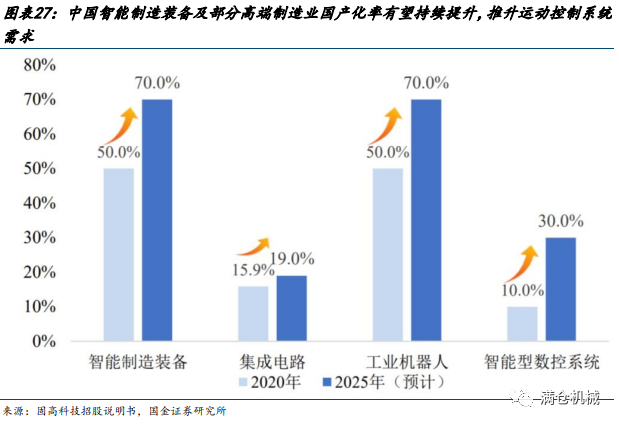
“十四五”智能制造发展规划》明确提出,到 2025 年,我国的供给能力明显增强,智能制造装备和工业软件技术水平和市场竞争力显著提升,国内市场满足率要分别超过 70%和50%,未来运动控制市场有望保持高增长。
4
海外品牌领跑中高端运动控制市场,国内企业已实现突破
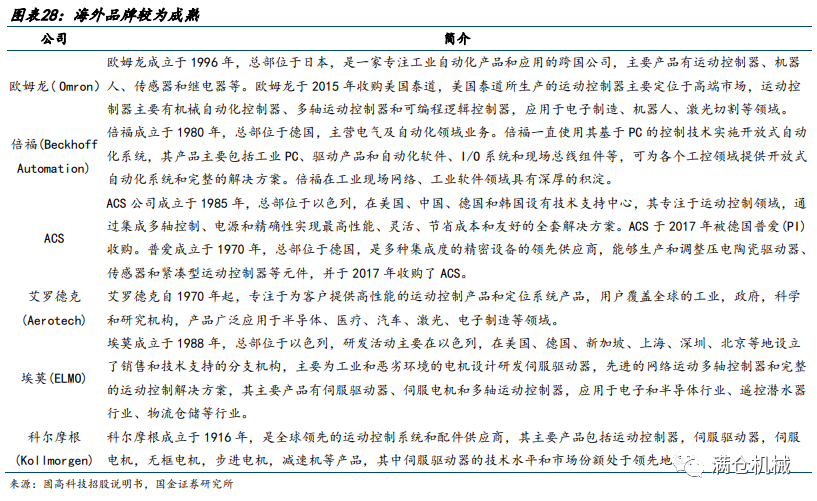
4.1 中高端运动控制与伺服驱动以欧美、日系厂商为主 目前高性能运动控制及伺服驱动产品的主要参与者为国外厂商
运动控制器生产商主要包括 Delta Tau Data Systems Inc.(美国泰道,已被欧姆龙收购)、ACS Motion Control Ltd.(以色列 ACS)、Aerotech Inc.(美国 Aerotech)等。伺服驱动器生产商主要包括Kollmorgen Corp.(美国科尔摩根)、以色列 ElmoMotion Control Ltd(以色列 ELMO)等。
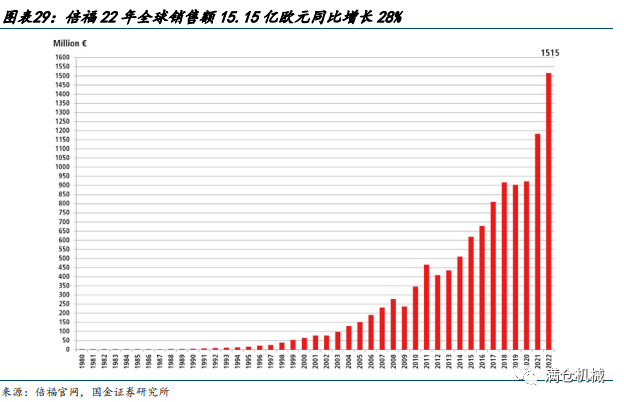
海外企业在产品丰富度、产品成熟度方面处于领先地位,以倍福(Beckhoff Automation)为例,其 22 年全球销售额为 15.15 亿欧元,同比增长 28%,全球员工人数 5680 人。
倍福基于 PC 平台打造开放式自动化系统,产品包括工业 PC、I/O 和现场总线组件、驱动技术、自动化软件、无控制柜自动化系统以及机器视觉硬件等,产品丰富度、成熟度较高。

4.2 国内企业在运动控制器、伺服驱动器等领域已实现一定突破
目前国内市场参与者包括禾川科技、华中数控、埃斯顿、雷赛智能、汇川技术、固高科技等企业。
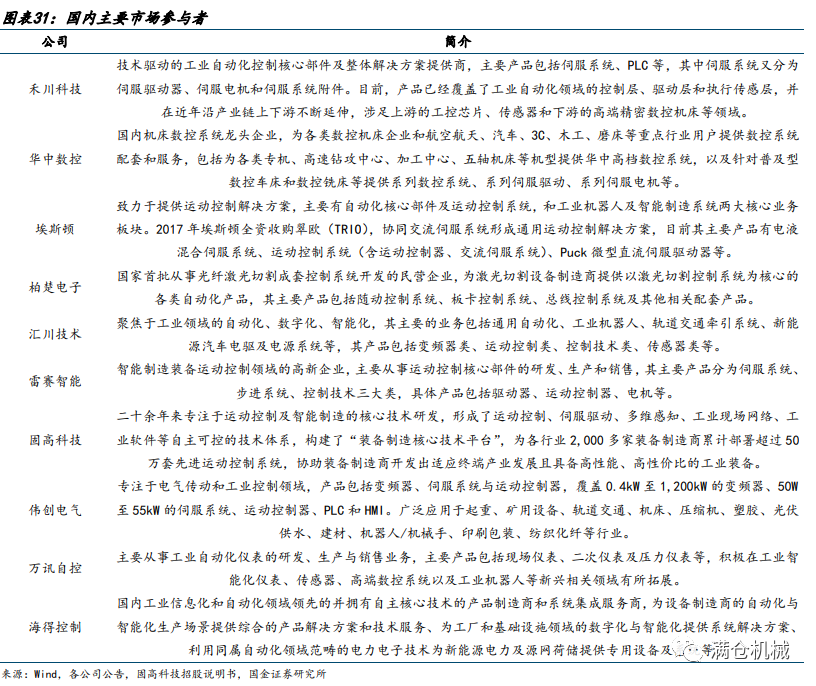
国内企业在运动控制器、伺服驱动等领域的核心技术、市场份额上已实现一定突破。
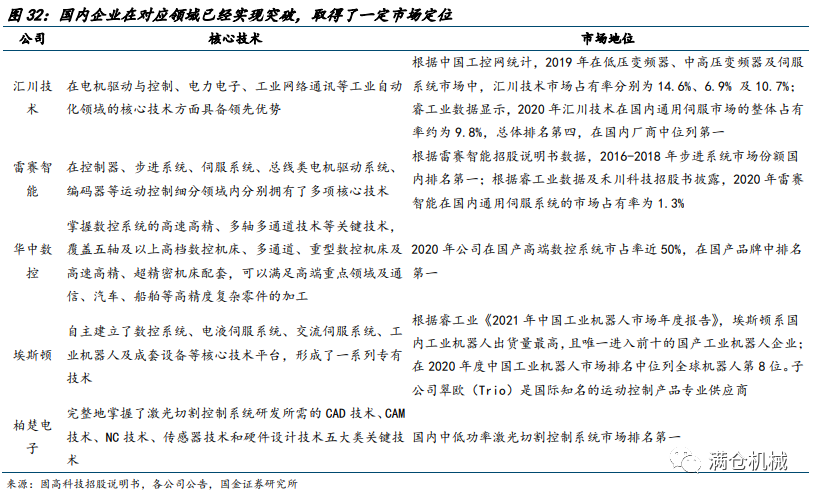
通用控制器市场分为 PLC 控制器、专用控制器、PC-based 控制卡等,外资品牌定位高端,国内品牌在 PC-Based 控制卡市场形成一定突破:1)PLC 控制器和嵌入式控制器市场,日本三菱、松下、西门子等外资品牌占据主要高端市场,中低端市场是完全市场化的竞争格局;
2)PC-Based 控制卡市场,高端市场由美国泰道、翠欧等外资品牌占据,但国内品牌逐渐向中高端发力,外资品牌市场份额呈现萎缩态势。目前,以固高科技、雷赛智能、成都乐创、众为兴为代表的国内品牌占据了 70%以上的市场份额。汇川技术、禾川科技等企业在伺服系统市场形成了突破,但仍有较大国产替代空间。
国产替代进展不及预期:目前在运动控制器、伺服驱动器领域国内企业已实现突破,部分国内企业已经步入第一梯队,但弱技术研发、市场开拓力度弱于海外企业,或导致国产替代进展不及预期,影响企业业绩增长。
人形机器人产业化进展不及预期:人形机器人由于对运动控制要求较高,人形机器人的产业化将显著提升运动控制市场需求增量,弱人形机器人产业化进展不急预期,将影响企业业绩增长。
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 3855
-
国内有哪些比较有名的机器人公司2014-12-23 55411
-
机器人依靠什么装置运动?2015-02-03 6143
-
中国机器人行业的现状——行业***2015-02-13 5524
-
2016年工业机器人行业前瞻2015-12-28 6377
-
工业机器人产业如火如荼 带来智能装备机遇期2017-02-14 4077
-
2017年可以去参加哪些专业的国际机器人智能装备大会?_2017-04-10 2053
-
2017(平湖)机器人与智能装备大会将于10月举办2017-08-15 4069
-
先进机器人控制2017-09-19 4390
-
机器人行业周报-政策与园区2018-05-08 2858
-
工业机器人的技术原理2018-11-23 4903
-
机器人基础书籍2019-05-22 3545
-
机器人运动控制技术2021-07-28 2211
-
机器人是什么?2022-03-31 22109
-
高端装备的大脑,工业控制的核心:我国运动控制系统发展现状和前景2021-01-07 11937
全部0条评论

快来发表一下你的评论吧 !
