

3D相机点云数据“如何读取”
描述
Halcon|读取3D相机点云数据
最近发现很多小伙伴在使用Halcon处理3D工业相机扫描结果的时候遇到了“如何读取”的问题。一般的3D工业相机储存数据的格式有txt格式、tif格式、csv格式、ply格式、ptx格式、bin格式、obj格式等。
txt格式
读取txt文件生成3D模型一般需要分析txt文件的储存格式,下图是我使用的工业相机储存的部分txt数据:
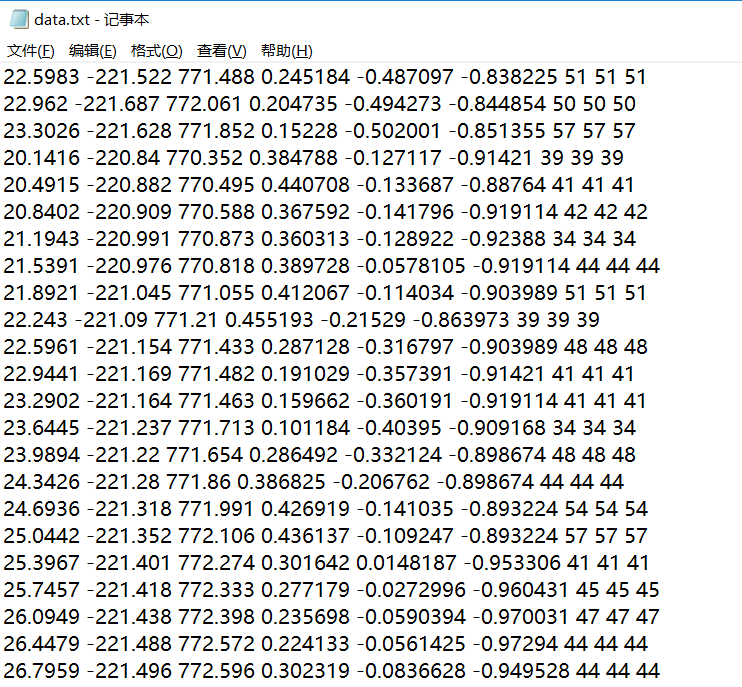 经过分析,前3列为X、Y、Z坐标,第4列到第6列为每一点的法线坐标nX、nY、nZ,第7列到第9列为灰度值。因此我们采用以下代码重构3D模型:
经过分析,前3列为X、Y、Z坐标,第4列到第6列为每一点的法线坐标nX、nY、nZ,第7列到第9列为灰度值。因此我们采用以下代码重构3D模型:
open_file ('data.txt', 'input', XYZ) #打开文件
X :=[]
Y :=[]
Z :=[]
nX :=[]
nY :=[]
nZ :=[]
Gray :=[]
fread_line (XYZ, OutLine, IsEOF) #读文件中一行的字符串
tuple_split (OutLine, ' ', Substrings) #根据空格分割一行的字符串
while (IsEOF==0) #将X Y Z nX nY nZ Gray分别存储在不同的元组中
X :=[X,Substrings[0]]
Y :=[Y,Substrings[1]]
Z :=[Z,Substrings[2]]
nX :=[nX,Substrings[3]]
nY :=[nY,Substrings[4]]
nZ :=[nY,Substrings[5]]
Gray :=[Gray,Substrings[6]]
fread_line (XYZ, OutLine, IsEOF)
tuple_split (OutLine, ' ', Substrings)
endwhile
close_file (XYZ) #关闭文件
tuple_number (X, NumberX)
tuple_number (Y, NumberY)
tuple_number (Z, NumberZ) #将字符串转化为数字
gen_object_model_3d_from_points (NumberX, NumberY, NumberZ, ObjectModel3D) #构建3D模型
visualize_object_model_3d (3600, ObjectModel3D, [], [], [], [], [], [], [], PoseOut) #显示3D模型
代码中的IsEOF参数为循环的判断变量,当文件未到末尾时,IsEOF为0;当文件到达末尾时,IsEOF为1。
3D模型显示结果如下: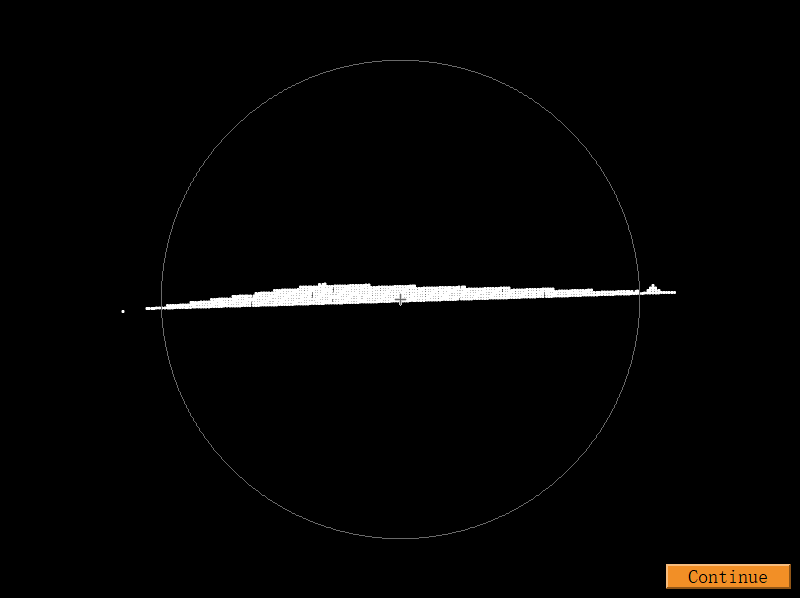
注意:1、通过元组生成3D模型时,采用gen_object_model_3d_from_points算子;2、一些3D相机的txt文件的数据之间采用@相连,此时应使用@对字符串进行分割。
tif格式
tif图片格式是工业相机损失较小的图片格式。一般3D相机会将不同的数据保存在不同的tif图片中。下图是我使用的工业相机储存的tif文件: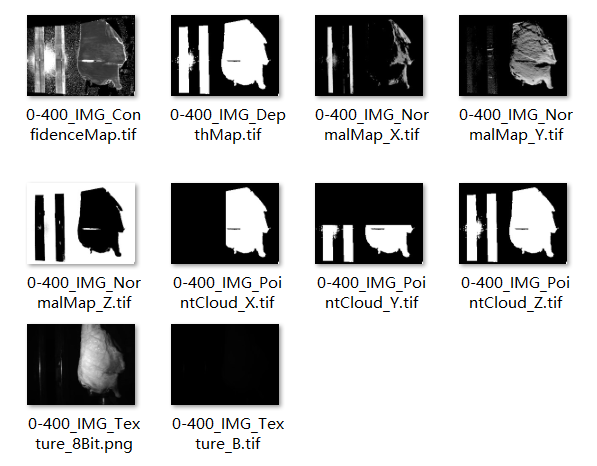
其中,PointCloud_X
PointCloud_Y PointCloud_Z为将点云的XYZ坐标作为灰度值生成的图片,NormalMap_X NormalMap_Y
NormalMap_Z为将点云的XYZ法线坐标作为灰度值生成的图片,Texture为一般的灰度图片。可使用以下代码重构3D模型:

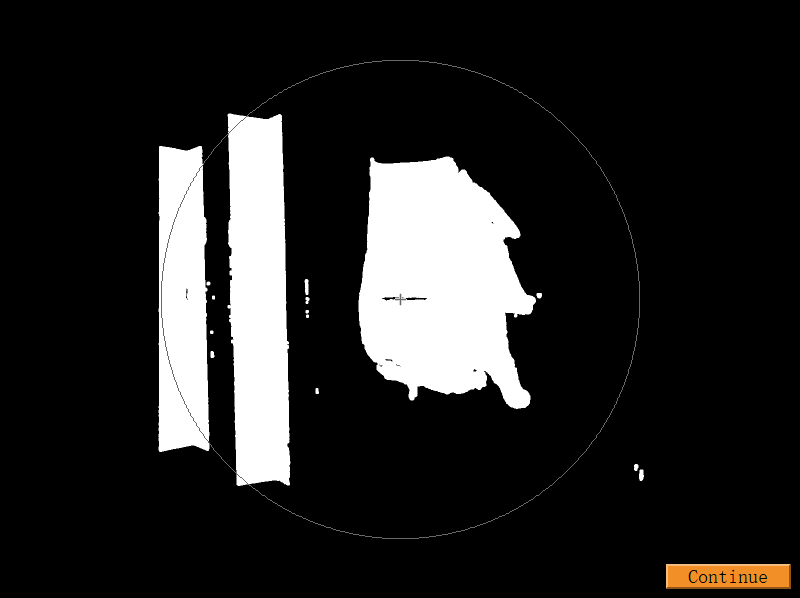
其中,读取的PointcloudX PointcloudY PointcloudZ等图片也可以先做Blob分析之后再合成3D模型。此时,若PointcloudX PointcloudY PointcloudZ的大小不一致,代码:

生成的3D模型将以PointcloudX为准。
注意:与算子gen_object_model_3d_from_points作对比,当通过图片生成3D模型时,采用xyz_to_object_model_3d算子。
Halcon直接读取
我购买的工业相机可以直接采用以下代码实时抓取数据,可以作为其他工业相机实施抓取数据的参考。
open_framegrabber ('PhoXi', 1, 1, 0, 0, 0, 0, 'default', -1, 'default', -1, 'false', 'default', '2018-08-034-LC3', -1, -1, AcqHandle) #打开相机
get_framegrabber_param (AcqHandle, 'revision', Revision) #得到相机参数
GrabDataItems:=['PointCloud', 'Texture', 'NormalMap', 'ConfidenceMap']
set_framegrabber_param (AcqHandle, 'grab_data_items', GrabDataItems) #设置相机参数
grab_data (ImageData, Region, Contours, AcqHandle, Data) #抓取数据
select_obj (ImageData, XYZ, 1) #选择3维数据XYZ(点云坐标)
select_obj (ImageData, Texture, 2) #选择1维度数据Texture
select_obj (ImageData, Normals, 3) #选择3维数据Normals(法线)
select_obj (ImageData, Confidence, 4) #选择1维数据Confidence
decompose3 (XYZ, XImage, YImage, ZImage) #将XYZ分解为X Y Z三通道
decompose3(Normals, nX, nY, nZ) #将Normals分解为nX nY nZ三通道
同样,可以对其中任意一张图像做Blob分析等操作,也可采用:

生成3D模型并进行显示。
CSV格式
CSV格式(Comma-Separated Values)直译为逗号分隔值(也称字符分隔值,因为分隔字符也可以不是逗号),是一种以逗号作为分隔符,对数据进行直接记录的文件。
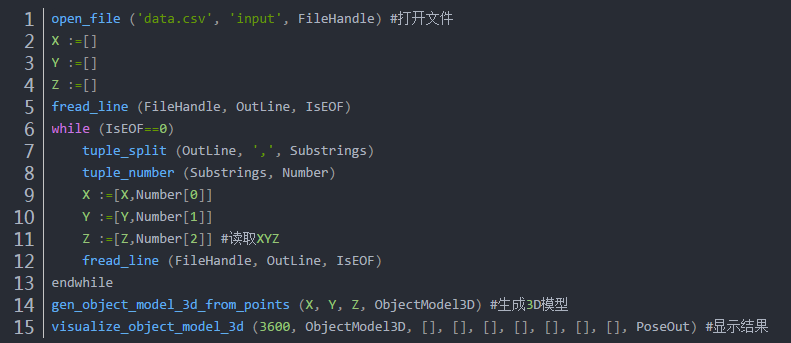
读取csv文件生成3D模型一般需要分析csv文件的储存格式。我们先创建一个csv文件。如下图所示,直接创建txt文件,每一行保存一个点云坐标,不同坐标之间采用“,”作为分隔符,另存为csv文件即可。
结果如下: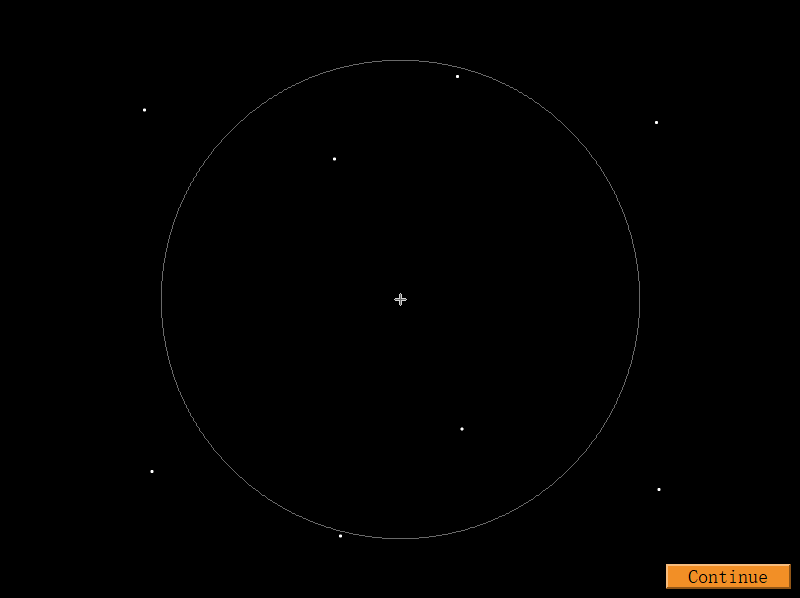
ply格式
ply是Halcon可识别的3D模型储存格式,可以直接打开。

结果如下: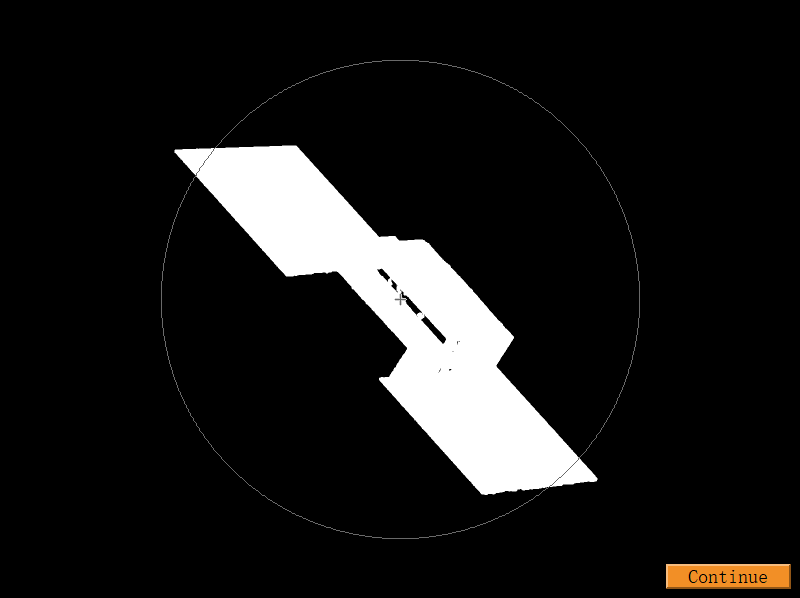
责任编辑:彭菁
-
基于3D点云的多任务模型在板端实现高效部署2023-12-28 3420
-
基于深度学习的方法在处理3D点云进行缺陷分类应用2024-02-22 2790
-
友思特C系列3D相机:实时3D点云图像虹科光电 2024-01-10
-
如何同时获取2d图像序列和相应的3d点云?2018-11-13 3049
-
3D点云技术介绍及其与VR体验的关系2017-09-15 1618
-
点云问题的介绍及3D点云技术在VR中的应用2017-09-27 1562
-
3D相机的类别及工作原理2020-09-24 21144
-
谷歌AI发布3D物体数据集,附带标记边界框、相机位姿、稀疏点云2020-11-13 3082
-
3D结构光相机的工作原理及优点2022-04-22 7900
-
何为3D点云语义分割2022-07-21 10677
-
影响结构光3D相机点云成像质量的DLP微投光机核心技术2022-10-10 4822
-
如何试用MediaPipe实现人脸3D点云数据提取2023-02-23 2646
-
自动驾驶3D点云语义分割数据标注2023-06-06 899
-
基于点云的3D障碍物检测介绍2023-06-26 2220
-
基于深度学习的3D点云实例分割方法2023-11-13 3978
全部0条评论

快来发表一下你的评论吧 !
