

西门子1200PLC带伺服8轴案例
描述
项目描述
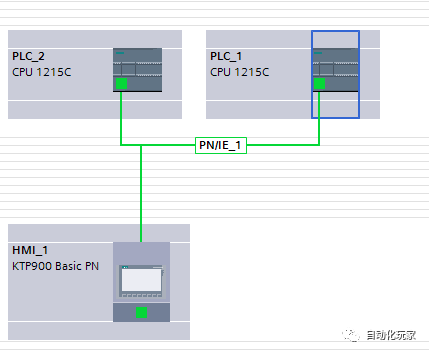
1.系统选用2个S7-1200cpu作为控制器,2#cpu只负责控制4个轴。
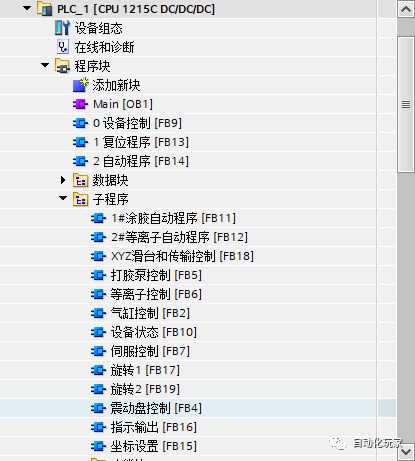
2.整个系统分为玻璃打胶机器人、等离子机器人和传输轴。
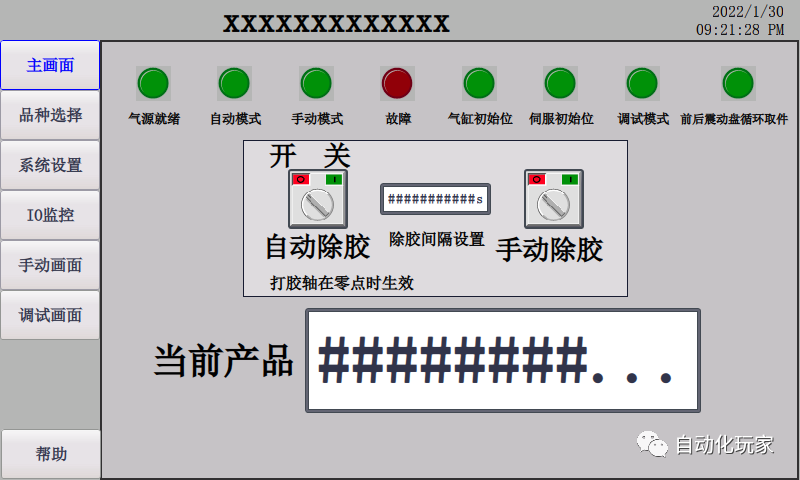
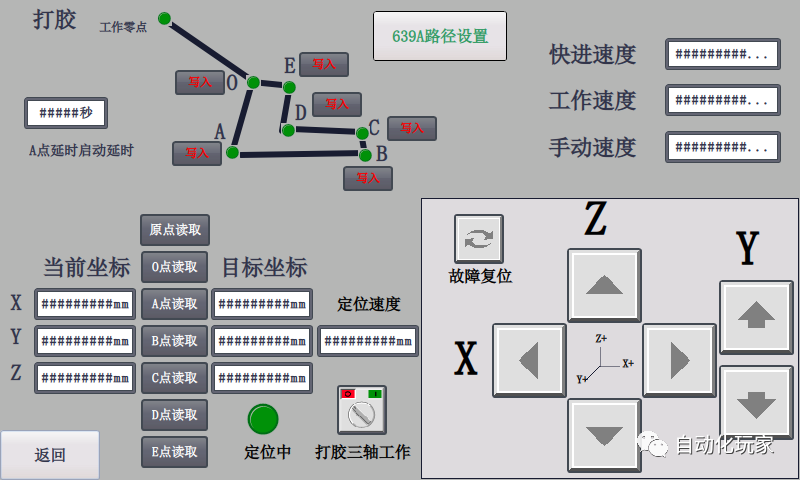
3.系统包含一个ktp900HMI,可进行手动调试,伺服轴路径位置和速度可单独写入,可设置配方,位置传感器可单独屏蔽。
硬件选型
1.西门子cpu1215c
2.KTP900 Basic PN
软件环境
TIA Portal v16/v17
程序截图
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
西门子PLC1200通过EtherCAT转Profinet网关连接kollmorgen驱动器2023-08-09 2852
-
基于Modbus/TCP的西门子1200PLC和STM32通信2021-11-23 2269
-
西门子1200PLC与库卡通讯软件设置步骤2022-03-17 1596
-
Modbus转Profinet网关将丹佛斯变频器接入西门子1200PLC配置2022-08-17 1310
-
西门子1200PLC工程创建及程序下载读取2023-02-09 21336
-
Profinet转Modbus485网关将探测器接入到西门子1200PLC2023-04-04 695
-
西门子1200PLC入门2023-04-18 934
-
西门子SMART200 PLC和西门子1200 PLC的Modbus TCP通讯实例2023-04-25 20070
-
西门子1200PLC连接科尔摩根伺服驱动器通讯案例2023-05-23 1410
-
西门子1200PLC之间的ModbusTCP通讯如何实现?2023-07-30 14156
-
EtherCAT转profinet网关连接kollmorgen驱动器将其接入西门子1200PLC2023-08-10 646
-
昆仑通泰触摸屏和西门子1200PLC的通讯设置2023-08-21 15272
-
西门子1200PLC与台达VFD变频器的Modbus通讯2023-11-09 1979
-
基于 EtherCAT 转 ProfiNet 网关达成西门子 1200 PLC 与伺服电机通讯连接的应用实例2024-12-09 2459
-
EtherCAT转ProfiNet西门子1200PLC与伺服电机通讯案例全解2025-03-21 2255
全部0条评论

快来发表一下你的评论吧 !
