

为什么Servo drive使用PWM,它是如何工作的?
工业控制
描述
1.为什么Servo drive使用PWM,它是如何工作的?
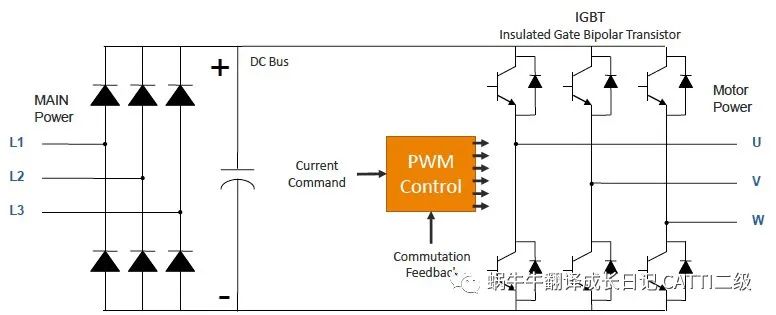
伺服驱动器的基本功能是将来自控制器的低功率信号(low-power signals)转换或放大(convert or amplify)为更高功率的信号(higher-power signals),以传递给电机绕组(motor windings)。
伺服驱动器(也被称为伺服放大器servo amplifiers)可以是线性的(linear),也可以是开关型的(switching),这取决于如何从逆变器(inverter)的开关器件(通常是IGBT或MOSFET)向电机输送功率。
线性伺服放大器(linear servo amplifier)通过保持逆变器的晶体管(transistors)在某种程度上始终打开(keep the transistors always on),使电压持续流向电机(voltage flow continuously to the motor)。
相比之下,开关式或PWM(脉宽调制)放大器则是通过开关逆变器的晶体管(switch the transistors on-and-off)来调节流向电机的电压(modulate the voltage)。
那么,为什么使用开关switching或PWM驱动,而不是线性驱动?
主要原因是效率(efficiency)。因为线性驱动器(a linear drive)中的晶体管始终处于开启状态,会产生高功率耗散(high power dissipation),可能产生大量的热量(generate significant heat)。这会降低效率并增加尺寸(increase size),因为驱动器需要一个合适的散热器(heat sink)或冷却机制(cooling mechanism)来保护晶体管。
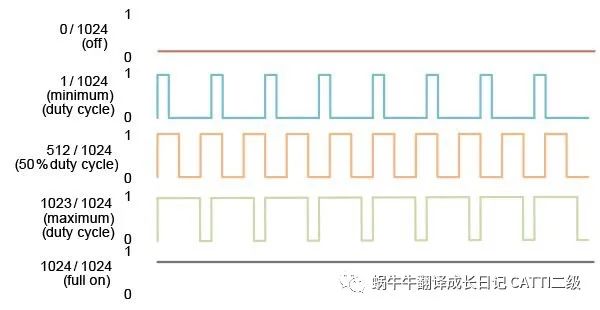
PWM驱动器以非常高的频率(通常为10至20赫兹)开关晶体管,产生一列方波脉冲(a train of square-wave pulses),模拟出模拟正弦波信号(an analog, sine wave signal)。
脉冲的占空比(duty cycle),开启时间占总时间(开启时间+关闭时间)的比率,决定了脉冲宽度(pulse width),进而决定了输送到电机的电压(voltage)和电流(current)大小。
由于PWM驱动中的晶体管在其线性(linear)或有源区工作(active region),换句话说,要么完全打开(fully on),要么完全关闭(fully off),所以功率耗散(power dissipation)和发热相对较低,特别是与基于载波(carrier-based)的PWM相比。而且,开关更快的PWM效率更高,因为晶体管在其线性区域的时间较少。
但是,快速切换会导致高dv/dt(电压变化),产生不良效果(result in undesirable effects),如干扰其他设备的噪声(noise)和被称为反射波(reflected waves)的过电压(over-voltages),因此需采用适当的过滤方法(proper filtering methods)和电缆屏蔽(cable shielding)。
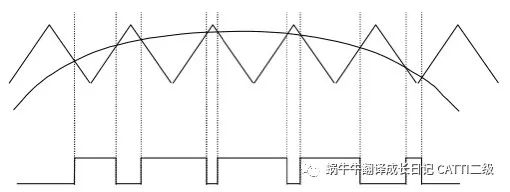
1.1 PWM驱动的脉冲可以通过以下两种方式。
在传统的方法中,通常被称为基于载波的PWM,PWM脉冲来自逆变器开关频率的三角信号(triangular signal),以及PWM发生器(PWM generator)产生的正弦波信号(a sine wave signal)。
PWM脉冲的一种更先进的方法(A more advanced method)称为空间矢量调制(space vector modulation),或SVM(或SVPWM)。
这种方法使用三相电压的矢量表示(vector representations of the three-phase voltages),并计算逆变器开关的所需占空比,以合成参考输出电压(synthesize a reference output voltage)。
空间矢量调制能更好地利用母线电压(bus voltage),向电机提供更高的电压(deliver higher voltage),总谐波失真更低(lower total harmonic distortion),扭矩纹波(less torque ripple)更小。
2.什么是空间矢量脉宽调制(SVPWM)?
控制三相感应电机和永磁同步电机(又名BLAC或PMAC电机)的一种常见方法是磁场定向控制(field oriented control),独立地控制定子电流的磁化和转矩产生的分量(magnetizing and torque-producing components)。这使得扭矩产生分量可保持与转子通量正交(torque-producing component keeps orthogonal to the rotor flux),从而最大限度地提高扭矩产生(maximize torque production)。
空间矢量脉宽调制(SVPWM),用于场向控制(FOC)的最后一步,确定逆变器开关的脉宽调制信号,以产生电机所需的3相电压。
以下是对SVPWM如何运作的总结:
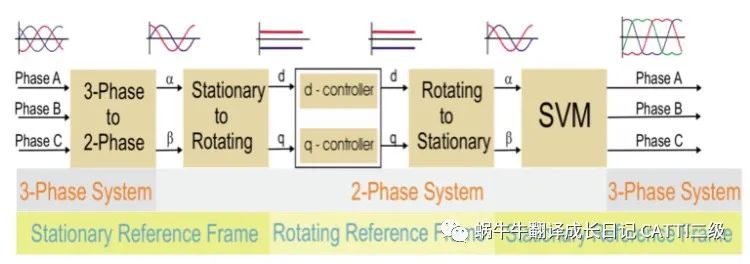
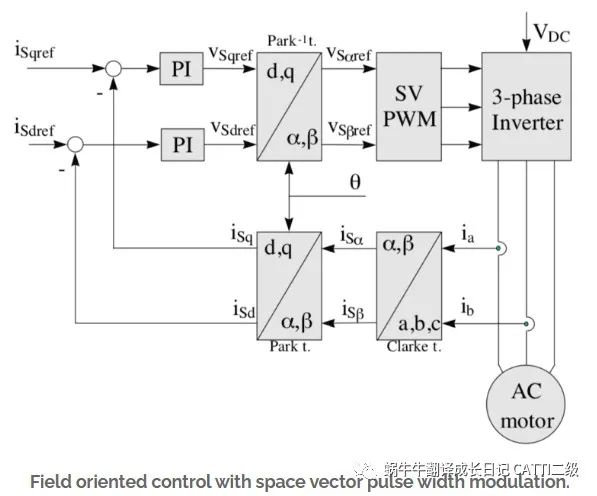
1.测量电机三相电流中的两相,并将其输入克拉克变换(Clarke transform),将其从三相系统(ia, ib, ic)转换为二维正交系统(two-dimensional orthogonal sytem)(iα, iβ)。请注意,没有必要测量三个电流,因为这三个电流之和必须等于零(0)。第三个电流必须是前两个的负数之和(the negative sum of the first two)。
2. 应用帕克变换(Park transform)将两轴静止系统two-axis stationary system(iα,iβ)转换为两轴旋转系统two-axis rotating system(iq,id),其中q轴电流与转子磁通对齐,d轴电流(产生扭矩的部分)与转子磁通正交。
3. 定子电流磁通和扭矩是独立控制的(controlled independently),通常由PI控制器控制。用于电机的电压Vd和Vq由PI控制器确定。
4. 反Park transform将两轴旋转系统(Vsqref, Vsdref)转换回两轴静止系统(Vsαref, Vsβref)。这些都是定子电压矢量的组成分量,是SVPWM的输入,以产生3相输出电压用于电机。(注意,使用SVPWM就不需要进行反克拉克变换(inverse Clarke transform)来获得三相输出电压)。
场向控制将一个三相系统的时变系统(time-dependent system)转变为一个双坐标(d和q)的时变系统(time-invariant system)。SVPWM用于最后一步,以确定应用于电机的PWM信号。
2.1 SVPWM背后的细节
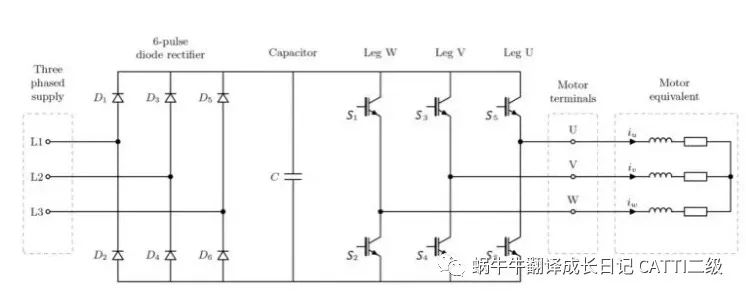
由六个晶体管(输出端每条腿两个two on each leg of the output)组成三相逆变器输送电压给电机。三个输出端中的每一个都可以处于两种状态之一:顶部晶体管关闭(top transistor closed),底部晶体管打开(bottom transistor open),或反之。因此输出端共有八(23)种状态。这些被称为基极向量(base vectors)。
八个基础向量绘制在一个六边形的星形图上(a hexagonal star diagram)。每个向量构成星形的一辐(a spoke of the star),相邻向量(adjacent vectors)之间有60度的相位差。两个包含全加(all plus)或全减(all minus)输出的向量(V0和V7)称为空向量(null vectors),绘制在星形的中心(原点origin)。
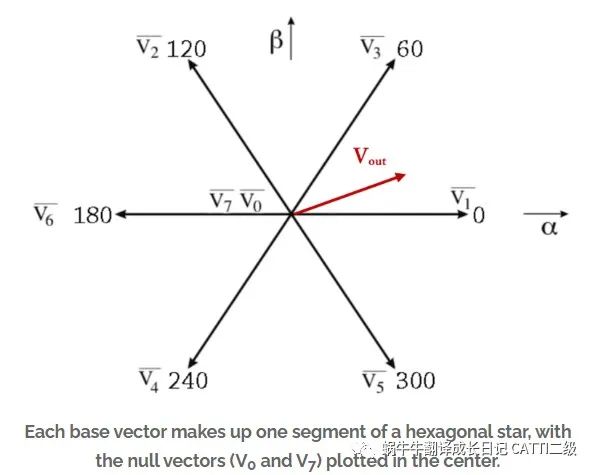
SVPWM的目标是在PWM期间(TPWM)产生"平均矢量(mean vector)",等于期望电压矢量(the desired voltage vector)(Vout)。
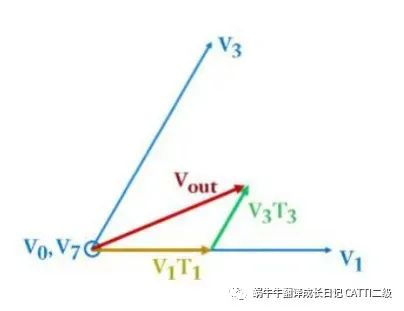
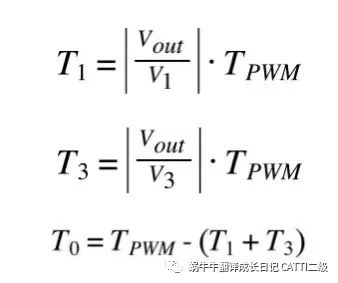
Vout的位置在星形图上确定,约束该扇区的基础矢量(例如V1和V3),以及一个空矢量,被用来合成期望的电压。在指定的时间(specified time)(T1)内应用V1,在指定的时间(T3)内应用V3,以及在必要的时间(T0)内应用空矢量(null vector),以提供一个等于Vout的结果矢量(a resultant vector)。
T1、T3和T0的值可以通过以下公式确定:
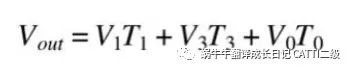
然后,Vout的模拟可以表示为:
与标准的场导向控制(FOC)相比,使用带有空间矢量脉宽调制可以更有效地利用直流电源电压,提供更低的谐波失真(lower harmonic distortion,从而提高功率因数,并减少扭矩纹波。
-
Netflix Servo应用运行指标监控2022-04-27 751
-
压印光刻技术是什么 它是如何工作的2022-07-25 2217
-
【Intel Edison试用体验】7.Grove Servo 电位器控制舵机运动2016-07-19 3194
-
Arduino中stepper和servo的区别2017-02-03 3448
-
GRID Test Drive背后的技术是什么?2018-10-09 1949
-
Micro:bit通过Servo Driver for micro:bit进行PWM接口扩展怎么实现?2020-11-05 2007
-
Ardunio开发实例-SG90 Servo伺服电机相关资料分享相关资料分享2021-06-28 1120
-
什么是备用电源?它是如何进行工作的?2021-10-21 2720
-
打印机的原理是什么?它是如何工作的?2021-11-11 2977
-
pwm的工作原理2008-10-27 9646
-
Circuit Converts PWM Fan Drive2009-04-17 1955
-
简单伺服测试仪电路--Simple Servo Tester2010-01-13 1432
-
基于DC-Servo的并联稳压供电电路2011-07-21 1743
-
日本哈默纳科Harmonic Drive谐波减速机结构及工作原理2022-07-08 5219
-
锁相环PLL是什么?它是如何工作的?2023-12-06 3654
全部0条评论

快来发表一下你的评论吧 !
