

一种面向低压电器的协同装配方法
电子说
1.4w人已加入
描述
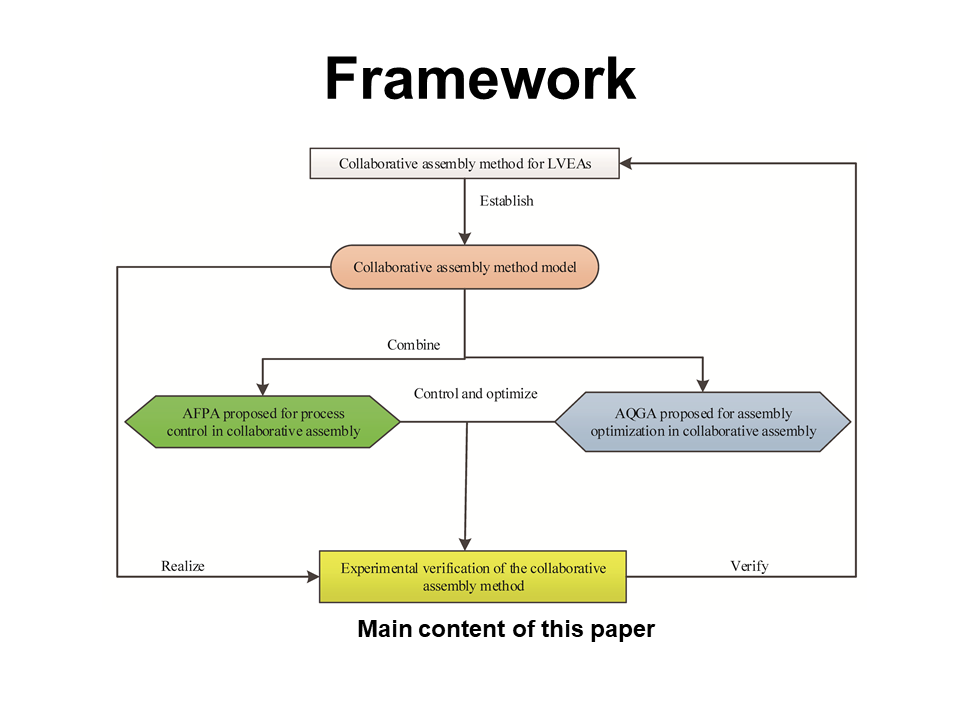
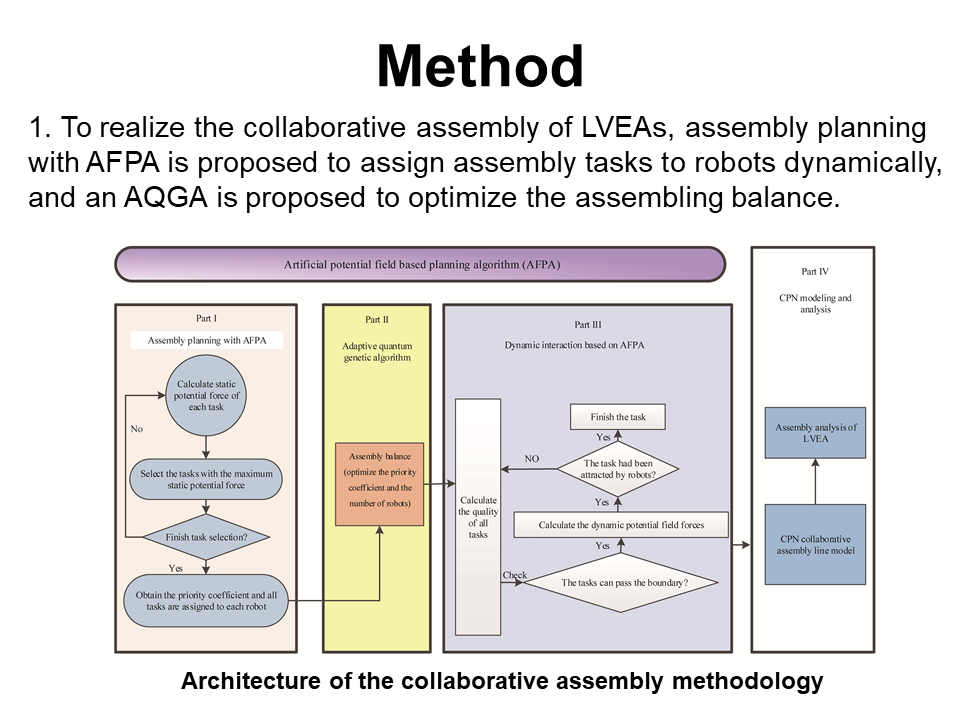
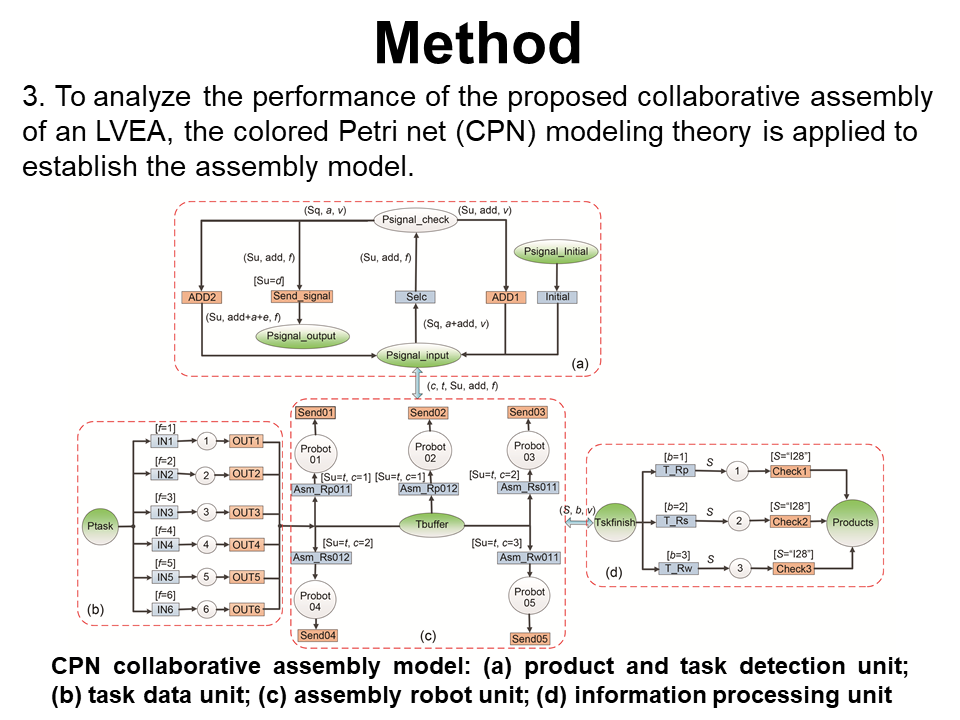
低压电器设备由较多零部件组成,结构较为复杂,其现有装配方法多是刚性、劳动密集和低平衡的装配工艺过程,不能随装配环境变化迅速改变。本文提出一种面向低压电器的协同装配方法。首先,根据协同装配的性能要求,构建着色Petri网模型,以分析协同装配中各机器人的自治性能和交互特性。
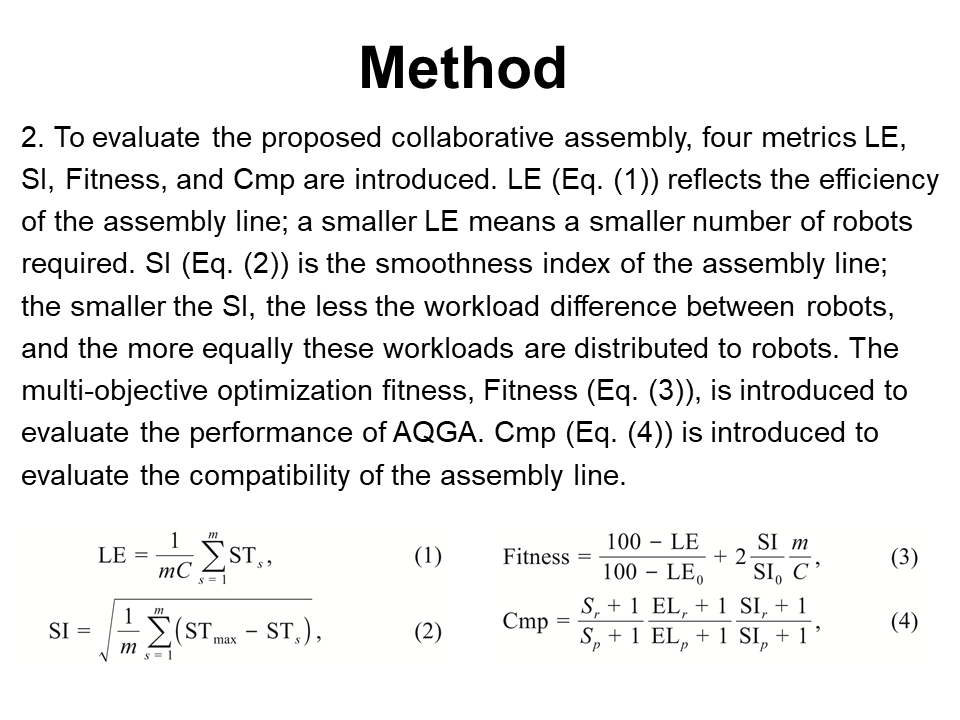
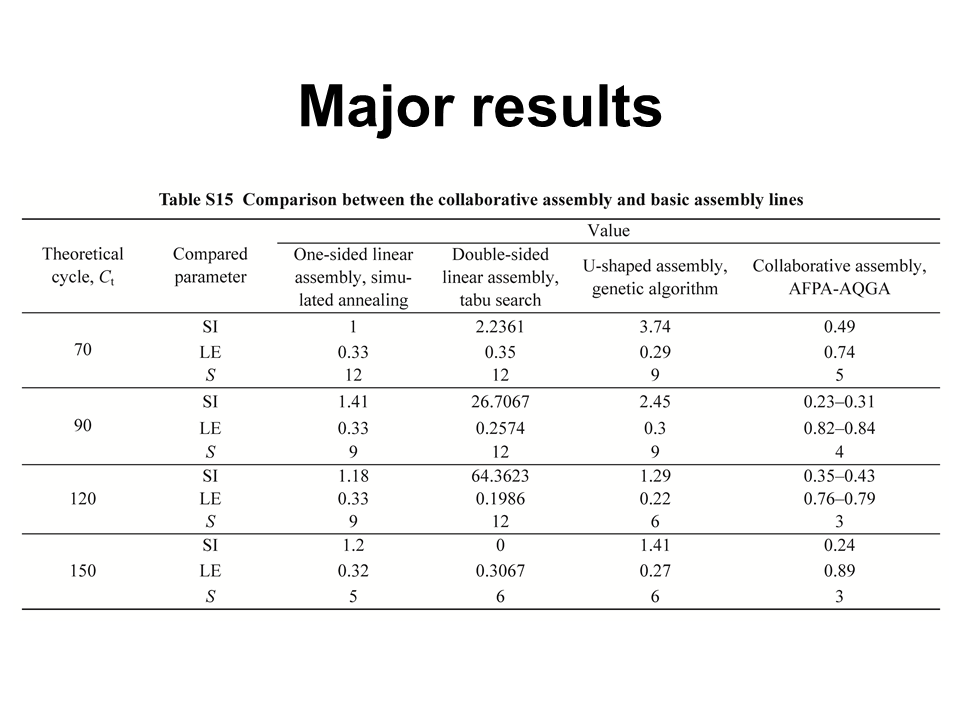
其次,在装配控制中提出一种基于规划的人工势场算法(artificial potential field based planning algorithm, AFPA),以实现低压电器设备协同装配中机器人静态全局规划和动态交互控制,并引入自适应量子遗传算法(adaptive quantum genetic algorithm, AQGA)对整个装配过程进行平衡优化。最后,以带漏电保护装置的二相断路器为例,对协同装配方法进行模拟分析。结果表明,低压电器装配中,协同装配方法具有较好的成本效益和柔性,同时装配资源得到较好分配。装配机器人能够相互间动态交互以适应低压电器设备装配中的变化。
作者
吕焕培1,2,张立彬1,谭大鹏1,胥芳1
单位:
1浙江工业大学机械工程学院,中国杭州市,310014
2宁波财经学院数字技术与工程学院,中国宁波市,315175
本文精要导读:
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
低压电器就是电器的电压低吗?2022-05-12 6693
-
低压电器的分类_低压电器元件有哪些2019-08-09 23756
-
常用低压电器有哪些_低压电器的分类_低压电器的结构2018-03-22 44583
-
低压电器设计手册2017-11-23 2282
-
低压电器的型号表示及含义,低压电器的作用、图形和文字符号2017-05-13 27957
-
低压电器培训2017-02-07 1030
-
低压电器课件下载2011-04-26 1937
-
低压电器产品样本2008-10-05 1442
-
常用低压电器原理及其控制技术2008-10-02 2766
-
低压电器分类2008-06-17 1501
-
低压电器选型手册2008-04-12 2098
全部0条评论

快来发表一下你的评论吧 !
