

看看在伺服电机中常用的几种编码器协议
工业控制
描述
我们知道编码器的种类有很多,什么增量式编码器、绝对值编码器、光电编码器、旋转编码器等等。但不管什么类型的编码器,其目的都类似,得到电机转动的角度、角速度、位移等,并将这些信息告知伺服驱动器。那么编码器与伺服驱动器之间的通信协议又有哪些呢,下面就跟大家一起来看看几种市场占有率较高的通信协议,它们分别是:BiSS-C通信协议、SSi通信协议、EnDaT通信协议、多摩川通信协议。
**1 ** BiSS-C通信协议
BiSS-C协议由德国IC-HAUS开发,是一种全双工同步串行总线型协议,专门为满足实时、高速、双向的传感器通信设计。其典型应用是在运动控制领域实现伺服驱动器与编码器通信。现已成为传感器通信协议的国际化标准。
目前在市场上支持BiSS-C的驱动器有华中驱动器、上银驱动器、新代驱动器等,还有一些驱动器厂家可以通过协议转化器转换来使得BiSS-C协议转换成驱动器厂家的所需要的协议,例如西门子的驱动器,自身不支持BiSS-C协议,通过协议转化器可以实现BiSS-C协议转换,从而达到与BiSS-C协议的编码器通信。
BiSS-C协议目前已成为伺服驱动编码器协议的主流协议之一,且BiSS-C协议具有其他协议不可比拟的优势,主要有以下几点:
(1)成本低
BiSS-C协议是一种开放式协议,全数字特点,因此无需协议产权成本,全数字接口无模拟器件的成本。
(2)高速
由于BiSS-C基于RS485/422技术,10MHZ的时钟频率可以使编码器的位置更新速度达到了5~20us,如此高的更新速度可以保证伺服驱动系统在低速时的超平滑控制。通常情况下,绝对值系统会发生“当速度转矩抖动达到四倍线速时,性能降低”的现象,而BiSS-C没有这个限制,所以带BiSS-C编码器的伺服电机可以帮助设计者实现高精度的响应速度需求。
(3)工业灵活性高
BiSS-C协议具有总线连接方式、报警位、数据长度可调等特点,使得在工业领域灵活性更高。BiSS-C协议主要采用两种工作模式:传感器模式和寄存器模式。
传感器模式:在驱动控制系统下,编码器将连续工作于传感器模式下。传感器模式下可以根据数据后方的6位CRC校验位来保证数据的准确性,传输32位的数据仅需约5us,其中包括编码器内部处理延时。
寄存器模式:寄存器模式既可以读取编码器参数,也可以存储参数于编码器,并可以查看更详细的报警内容。如污染、离位、过温、过压的自定义报警内容。这些参数可以存放于一个256字节的寄存器组,BiSS-C协议的上位机可以通过寄存器模式对编码器的EEPROM进行读取写入的操作。
**2 **SSI 通讯协议
SSI 通讯协议全称为同步串行接口(Synchronous Serial interface)。它是绝对值编码器一种常用的通信协议。
在早期的时候,大多数采用的是并行输出。随着编码器位数的增长,并行输出就不适用了,主要原因是经常出现数据不准、错误的现象。比如在传输过程中,只要有一根数据线受到干扰出现了问题,就会影响最终传输的数据。所以,在这种背景下SSi协议就应运而生。
随着时代的发展,SSi协议的缺点也逐渐显现,例如随着传输长度的增加,其波特率就要降低,这样就导致了长距离传输要牺牲一部分传输速度。其次,SSi协议没有延时补偿。不过目前市场上仍有很多设备使用SSi协议进行通讯。
SSI 通讯的帧格式如图3所示,数据传输采用同步方式,在空闲阶段不发生数据传输的时候时钟和数据都保持高电位,在第一个脉冲的下降沿触发编码器载入发送数据,然后每一个时钟脉冲的上升沿编码器送出数据,数据的高位在前,低位在后,当传送完所有的位数以后时钟回到高电平,数据也对应回到高电平。
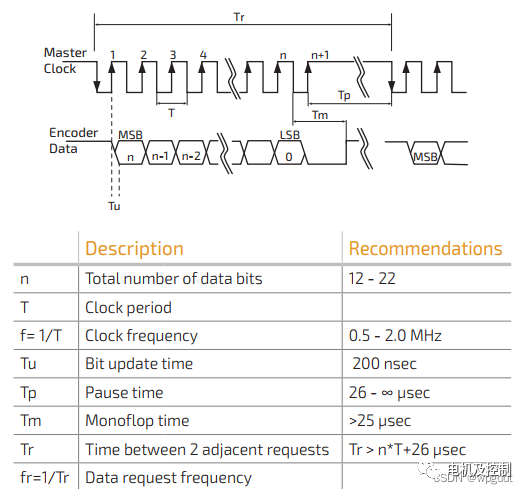
图3
T 为时钟的脉冲频率,Tm 为单稳触发时间,n 为传输位数。传输的位数可以是任意的,但实际使用中单圈编码器采用 13 位,多圈采用 25 位。对于从方编码器而言是无法事先知道主方发送的时钟脉冲个数的,因而无法确定帧的起始位和停止位。解决问题的方法是采用高电位保持一段的时间内没有变化作为帧结束标志。Tm 单稳时间就是指这个时间。在实际应用中可以采用一个单稳(软件或者硬件),把时钟输人作为单稳的输入,通过单稳输出控制 SSI 的数据输出状态:单稳一旦置位,SSI 的输出状态就要回到初始状态,准备开始下一个数据的循环过程。
**3 **EnDat 协议
EnDat 口是 HIDENHAIN 为编码器设计的数字式、全双工同步串行的数据传输协议,它不仅能为增量式和绝对式编码器传输位置值,同时也够传输或更新存储在编码器中的信息,或保存新的信息。由于使用了串行传输方式,所以只需四条信号线,在后续电了设备的时钟激励下,数据信息被同步传输。数据类型(位置值、参数、诊断信息等)由后续电子设备发送给编码器的模式指令选择决定。
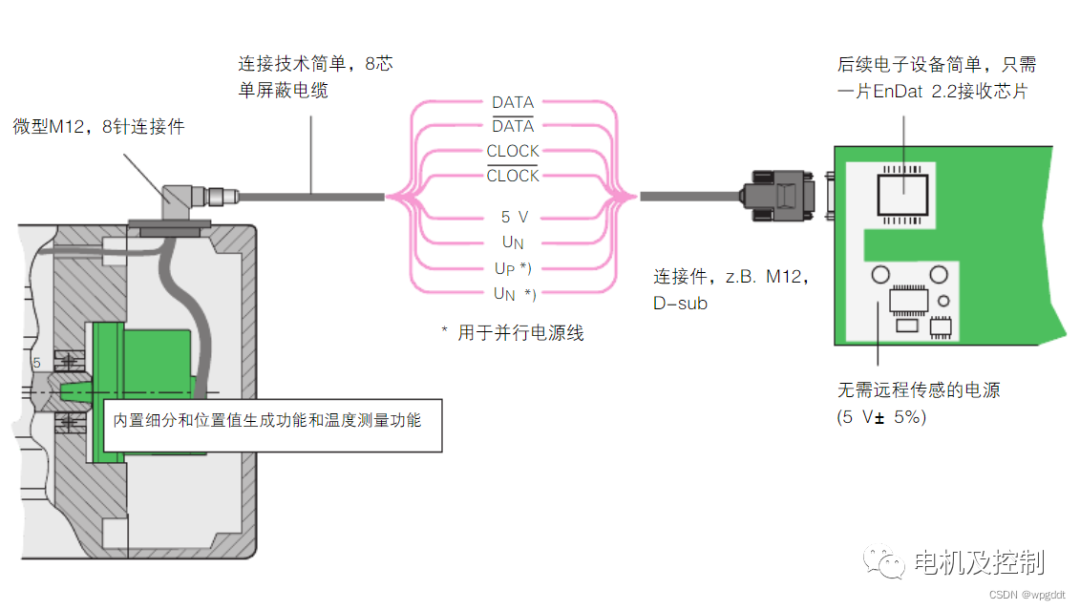
图4
特点:
1.传输位置值与附加信息可同时传输,信息的类型可通过存储地址选择码选择。
2.编码器数据存储区域包括编码器制造商参数、OEM 厂商参数、运行参数、运行状态、便于系统实现参数配置。
3.EnDat2.2编码器实现了全数字传输,增量信号的处理在编码器内部完成(内置 14bit 细分),提供了信号传输的质量和可靠性,可实现更高的分辨率。
4.监控和诊断功能,报警条件包括:光源失效、信号幅值不足、位置计算错误、运行电压太低或太高、电流消耗太大等;当编码器的一些极限值被接近或超过时提供警告信号。
5.更宽的电压范围(6-14V)和传输速率(16M)。

图5
在每一帧同步数据传输时一个数据包被发送,传输循环从时钟的第一个下降沿开始测量值被保存,计算位置值。在两个时钟脉冲(2T)后,后续电子设备发送模式指令“编码器传输位置值”(带或不带附加信息)。
在计算出了绝对位置值后,从起始位开始编码器向后续电子设备传输数据,后续的错误位 F1 和 F2(只存在于 EnDat2.2 指令中)是为所有的监控功能和故障监控服务的群组信号,他们的生成相互独立,用来表示可能导致不正确位置信息的编码器故障导致故障的确切原因保存在“运行状态”存储区,可以被后续电了设备查询。
从最低位开始,绝对位置值被传输,数据的长度由使用的编码器类型决定。传输位置值所需的时钟脉冲数保存在编码器制造商的参数中。位置值数据的传输以循环冗余检测码结束。
**4 **多摩川协议
多摩川绝对值编码器能够实现单圈 23bit 多圈 16bit 总计39bit 的高解析度。其数据通讯是基于 485 硬件接口标准 NRZ 协议,通讯波特率为 2.5M 的串行通讯。CRC 循环冗余校验数据,避免数据出错导致异常的问题发生,通讯距离可达到 20 米。
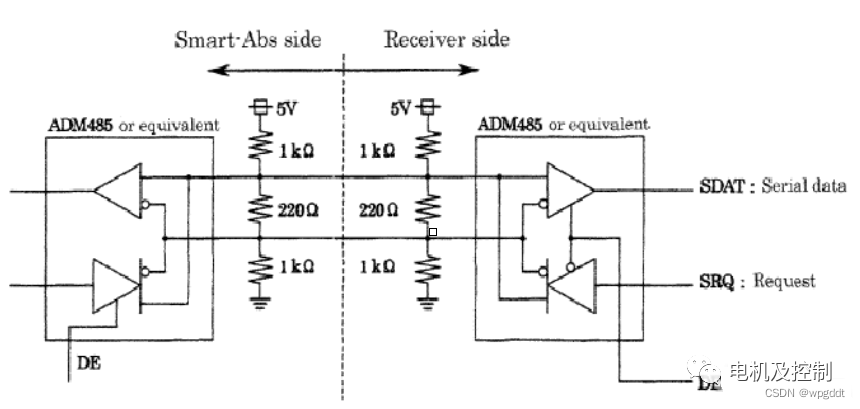
图6
编码器具备状态自建功能,对于电池欠压、失效、编码器计数错误、过速度、码盘故障等可通过编码器状态位读取出来。驱动器可通过单独的指令对单圈数据或多圈重置零位,可清除故障标志位。内置 768 字节 EEPROM,可擦写一万次以上,可写于电机相关信息,对于伺服驱动器对电机参数的自动识别提供了可行的途径。
通讯步骤如下图所示:

图7
驱动器向编码器发送一个控制字 CF,3us 后编码器返回数据包,驱动器对数据包进行解码并,主控获取到信息后开始运行相应的算法进行控制。
以上为几种常用的编码器通信协议,我们可以根据实际项目需求选择相应的编码器将数据传送给伺服驱动器进行控制。
-
伺服电机编码器怎么选型2025-03-11 2533
-
伺服电机编码器故障及维修2025-01-21 5550
-
伺服电机编码器如何调零2024-06-05 9860
-
伺服电机编码器原理及编码器分类2023-09-22 2751
-
伺服电机编码器原理及使用注意的事项2023-08-25 3007
-
伺服电机编码器2023-06-26 2524
-
伺服电机编码器基础简介2023-02-24 3997
-
伺服电机编码器原理_伺服电机编码器种类2019-11-07 11691
-
伺服电机编码器维修2019-11-06 13816
-
伺服电机自带编码器为什么还要外加编码器?2018-02-03 64045
-
伺服电机编码器原理(伺服电机编码器几根线以及接线图)2017-11-10 138211
全部0条评论

快来发表一下你的评论吧 !
