

MBD的Simulink使用技巧:Simulink代码生成的基本概念(1)
电子说
描述
2 Simulink代码生成的基本概念
2.1 代码生成工具
MATLAB/Simulink中一共提供三个代码生成的工具:
- MATLAB Coder
- Simulink Coder
- Embedded Coder
从名字能看出来,MATLAB Coder用于m脚本生成C/C++代码;而Simulink Coder用于模型、Stateflow等生成C/C++代码;而 Embedded Coder是上述两者的集成,同时扩展了在嵌入式开发中必不可少的特性 。
也正是Embedded Coder提供了针对MATLAB Coder和Simulink Coder的配置选项和代码优化选项,从而 精细控制生成代码的函数、数据和接口 。这可以提高代码的执行效率和可读性,利于代码的集成。
所以文章介绍的以Embedded Coder为主。
关于这三个代码生成工具的更多介绍,可以查看资源库中的“临时资源分享”文件夹下的 tA21 。资源库的获取可以在《autoMBD原创技术文章合集》中找到。
2.2 Simulink生成应用代码
MathWorks官方一直强调,使用 Simulink生成应用代码(Application Code) ,而不是其他代码(虽然利用硬件支持包可以生成底层驱动等代码)。
何为应用代码?简单的可以认为应用代码是执行算法的程序,可以参考开源项目AMBD-MC中的FOC核心算法模型:
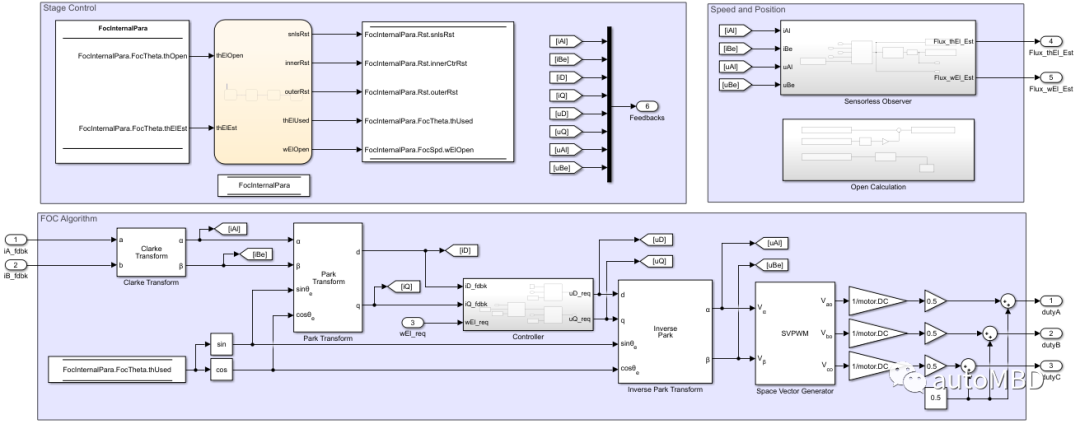
FOC核心算法模型 - From autoMBD
在MBD代码生成中,它应该部分或全部具有以下接口:
- 一个被主程序调用的接口(必须);
- 与其他模块交换数据的接口;
- 与底层I/O驱动交换数据的接口;
- 数据的记录接口(即log,用于调试);
- 软件库调用接口。
上图中的FOC核心算法模型中,包含了上述的前三种接口。这些接口用于代码集成时的函数调用、数据交换、代码调试等(代码集成的过程可以参考《文章合集》第十七篇)。
2.3 有接口的模型如何仿真
如上图FOC核心算法模型所示,该模型有很多Input和Output接口,这些接口表明对该模型仿真需要接收外部数据,同时需要将运算结果输出到外部。
这种模型的仿真有两种方式:
- 模型引用(Model Reference)
- 数据导入/导出(Data Import/Export)
模型引用 ,即使用Simulink模型库中的Model或Subsystem Reference模块来实现数据的输入和输出,这意味着需要额外的一个上层模型(Top Model)来提供输入数据和接受输出数据。 善用模型引用可以提高模型算法开发的独立性、重用性 ,在《文章合集》第十六篇中,实现PIL测试就是使用的这个方法。
这两个模块位于下图所示的位置:
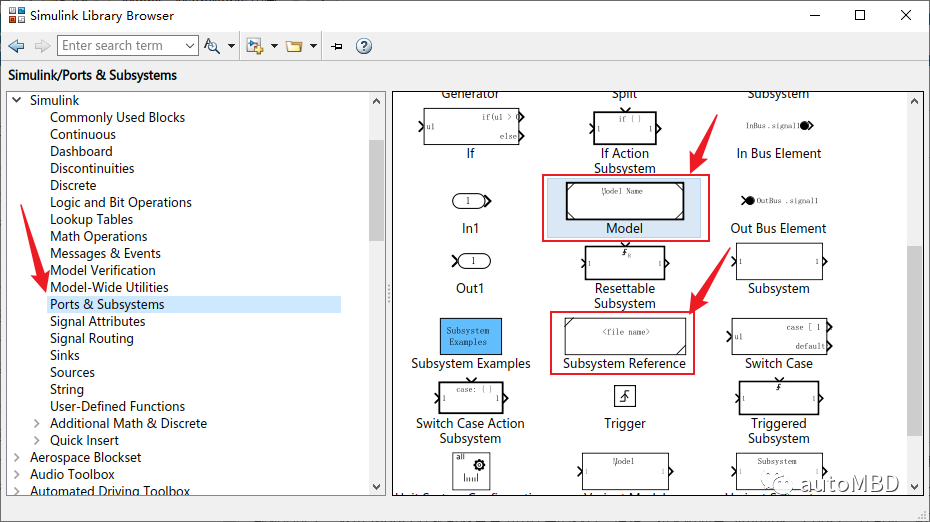
模型引用模块 - From autoMBD
特别注意,Model和Subsystem Refence模块都能实现模型引用,但它们是有区别的:
- Subsystem Refence引用的是子系统模型,而Model引用的是普通模型;
- Model模块可以用于PIL和SIL测试,而Subsystem Refence不行;
- 它们在生成代码的处理方式有区别,Subsystem Refence在生成代码时,与模型中的子系统没有区别,但Model不能当作模型中的子系统,它是一个独立的模型。
而使用数据导入/导出的方式不需要新建Top模型,但需要准备 具有时间序列格式的输入数据 ,将其导入到MATLAB工作区中;而输出数据会直接生成在MATLAB工作区中。
时间序列数据如下图所示:
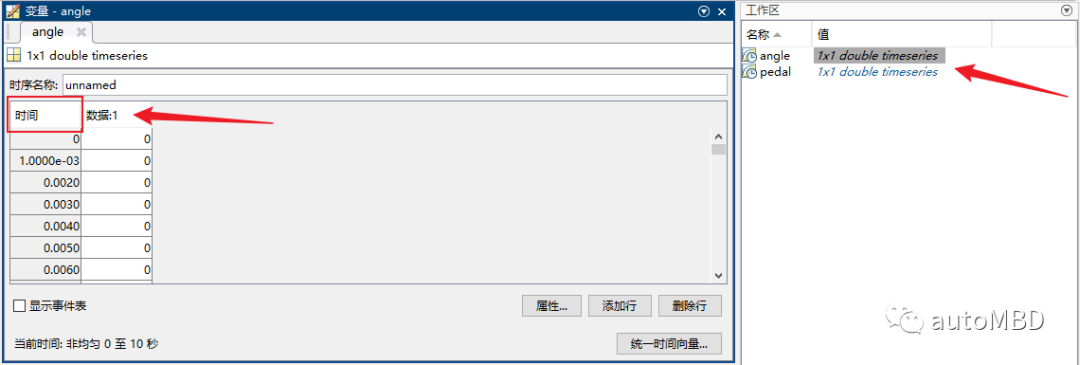
时间序列数据 - From autoMBD
创建时间序列数据可以使用如下语句:
ts = timeseries(rand(5,1));
将模型与MATLAB工作区的时间序列数据连接在一起的方法如下图所示。在Input框中输入变量名即可连接输入;图中下面的选项可以配置Output输出数据的格式,仿真完成后输出数据会保存在MATLAB工作区。
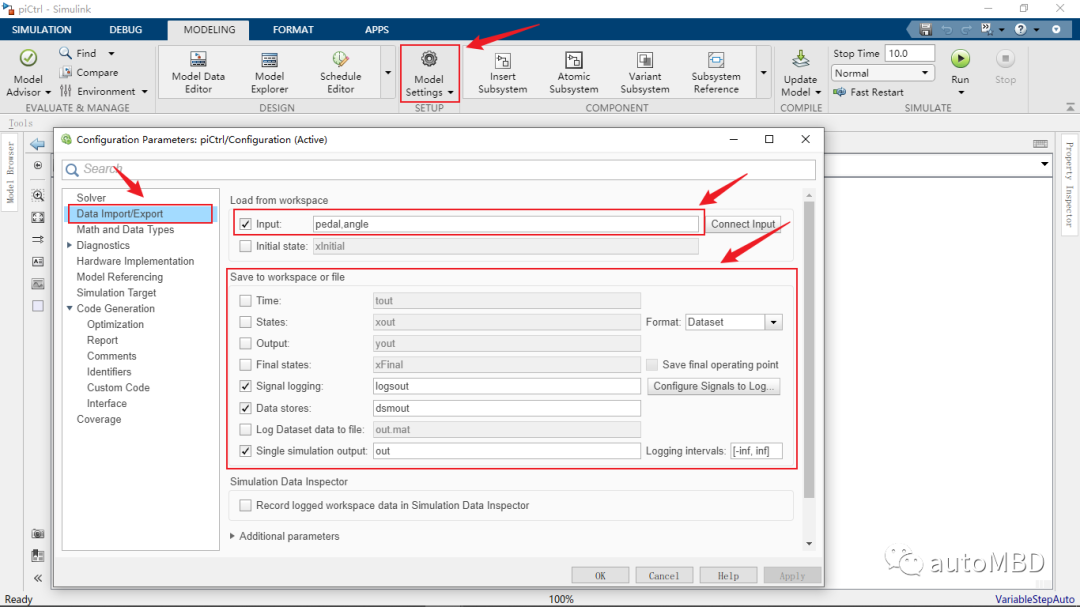
Data Import/Export - From autoMBD
2.4 模型生成代码的基本要求
一个模型要能生成嵌入式代码,至少需要满足以下两个要求:
- Simulink求解器设置为定步长;
- 选择代码生成的系统目标文件ert.tlc。
设置模型求解器的步长的方法如下图所示。求解器的其他配置可以保持默认,也可以根据实际需求修改。
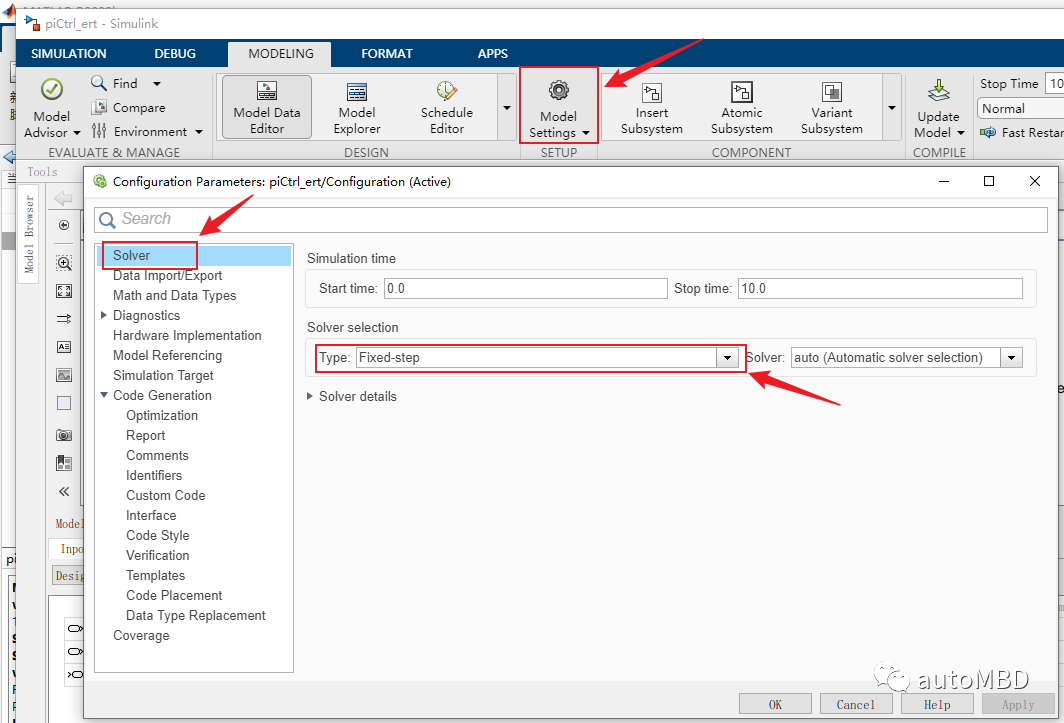
设置求解器定步长 - From autoMBD
系统目标文件ert.tlc描述了模型如何生成代码完整方法和流程,由MathWorks开发,可以在MATLAB的安装目录中找到该文件。
但该文件只是模型生成代码的一部分,它的背后隐藏了大量关于模型生成代码的细节。完整的ert.tlc文件用户是不可见的。
选择代码生成的系统目标文件ert.tlc的方法如下图所示。
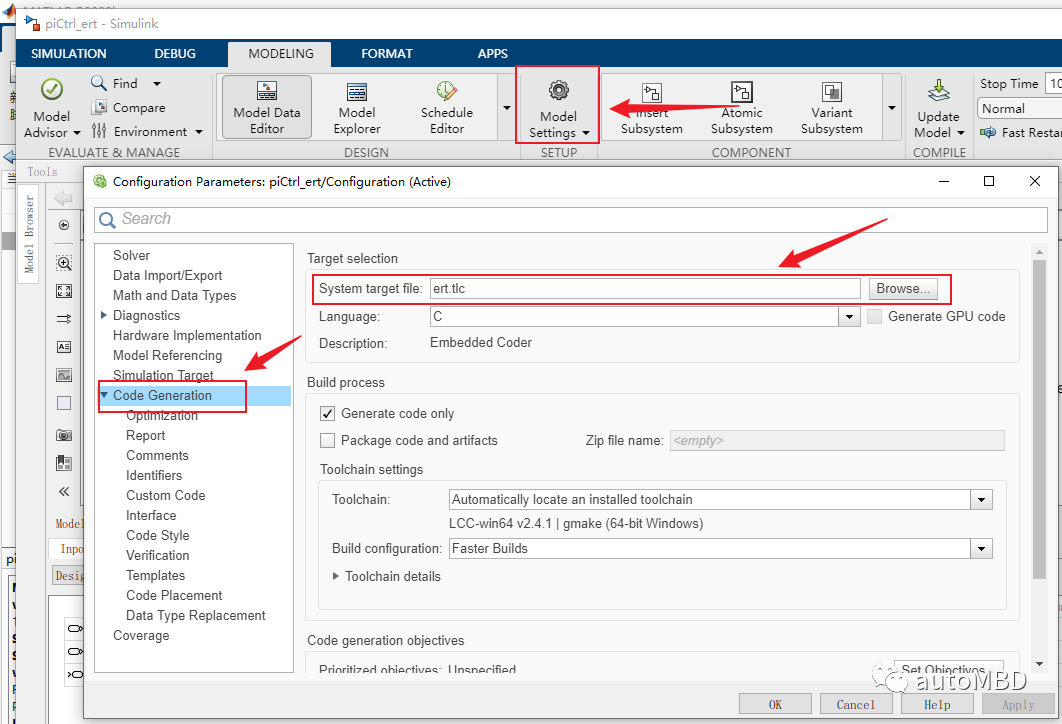
设置代码生成目标文件**ert.tlc - From autoMBD
点击“Browse”可以看到很多不同类型的系统目标文件(如下图所示),这些目标文件适用于不同的应用场景。对应嵌入式开发,选择ert.tlc即可(ert的全称为Embedded Real Time)。
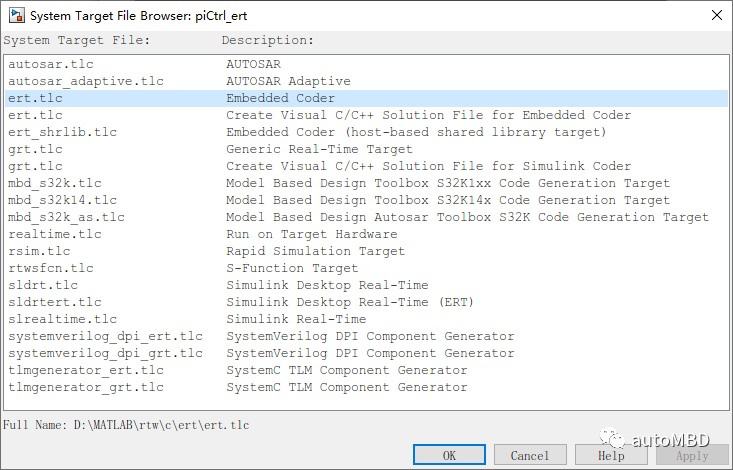
不同类型的系统目标文件 - From autoMBD
满足定步长和系统目标文件的条件,模型就能生成嵌入式代码了。
- 相关推荐
- 热点推荐
- 嵌入式系统
- MATLAB仿真
- MBD
- simulink仿真
- FOC算法
-
使用Simulink自动生成浮点运算HDL代码(Part 1)2025-10-22 275
-
simulink自动生成ROS代码2023-11-15 1977
-
利用Simulink自动生成STM32串口代码2023-10-25 3577
-
MBD的Simulink使用技巧:详解代码生成中的模型与代码(2)2023-07-13 8761
-
Simulink 自动代码生成原理分享2022-05-31 9183
-
基于Simulink代码生成过程是怎样的?2022-02-18 1180
-
软件集成:Simulink与STM32联合开发2021-12-24 1006
-
请问simulink代码如何生成2020a?2021-11-22 1472
-
怎样使用stm32+simulink进行MBD的开发呢2021-11-18 2412
-
Simulink模型架构的设计资料分享2021-11-11 818
-
手把手教你SIMULINK代码生成2021-08-18 1931
-
用simulink自动生成C代码2021-08-17 1407
-
Simulink模型生成代码2021-08-11 2115
-
MathWorks推出新款代码生成工具Simulink2012-04-26 1680
全部0条评论

快来发表一下你的评论吧 !
