

激光雷达的结构与种类
描述
一、激光雷达的结构
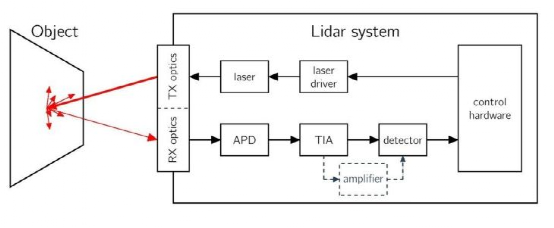
激光雷达的关键部件按照信号处理的信号链包括控制硬件DSP(数字信号处理器)、激光驱动、激光发射发光二极管、发射光学镜头、接收光学镜头、APD(雪崩光学二极管)、TIA(可变跨导放大器)和探测器,如图所示。其中除了发射和接收光学镜头外,都是电子部件。随着半导体技术的快速演进,性能逐步提升的同时成本迅速降低。但是光学组件和旋转机械则占具了激光雷达的大部分成本。
二、激光雷达的种类
目前市面上有不同种类的激光雷达,按驱动方式可分为机械式、MEMS、泛光面阵式(FLASH)。
机械式
以Velodyne
2007年推出的64线雷达为例。它把64个激光器垂直堆叠在一起,以20rpm速度旋转。简单理解就是通过旋转将激光点变成线,通过64线堆叠将线转化为面,得到点云数据获取3D环境信息。
机械式结构需要复杂的机械结构,同时点云的测量又需要对安装进行精确定位。考虑环境和老化的影响,平均的失效时间仅1000-3000小时,难以达到车厂最低13000小时的要求。且由于LiDAR安装在车顶,民用领域需考虑外界养护的问题,如洗车的影响。因此机械式结构极大的限制了成本和应用推广。
MEMS
MEMS激光雷达利用微电子机械系统的技术驱动旋镜,反射激光束指向不同方向。
固态激光雷达的优点包括了:数据采集速度快,分辨率高,对于温度和振动的适应性强;通过波束控制,探测点(点云)可以任意分布,例如在高速公路主要扫描前方远处,对于侧面稀疏扫描但并不完全忽略,在十字路口加强侧面扫描。而只能匀速旋转的机械式激光雷达是无法执行这种精细操作的。
典型应用有法雷奥SCALA激光雷达。目前应用在奥迪A8(第一款L3级的自动驾驶车辆)。安装在前保险杠位置,使用MEMS技术得到145°的扫描角度,80m的探测距离。
-
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理2023-08-22 5032
-
一文解析激光雷达结构2023-05-10 10418
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30521
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 10130
-
激光雷达2021-01-17 20220
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 41719
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5787
-
TOF激光雷达2019-06-07 9316
-
机器人和激光雷达都不可或缺2019-02-15 6239
-
固态设计激光雷达2018-01-25 8538
-
消费级激光雷达的起航2017-12-07 7512
-
激光雷达面临的机遇与挑战2017-09-26 6742
-
常见激光雷达种类2017-09-25 14027
-
激光雷达分类以及应用2017-09-19 8923
全部0条评论

快来发表一下你的评论吧 !
