

永磁同步电机控制中的Clarke和Park变换
工业控制
描述
** Clarke和Park变换**
永磁同步电机的本质是利用磁场(定子导电线圈产生磁场+转子永磁体产生磁场)产生电磁力(转矩) 。磁场的电磁力的大小与磁感应强度、导体内的电流、导体的长度以及电流与磁场方向间的夹角都有关系, 在均匀磁场中,他们之间的关系可用公式F=BILsinθ表示 。这个大家在高中物理已经很熟悉了。
当定子磁场和转子磁场重合,即 θ=0° ,电机转矩为0。
当定子磁场和转子磁场正交,即 θ=90° ,电机转矩最大。

电机控制的目的是产生转矩,并最大程度提高转矩,以改善电机性能。因此, 如何保证电机定子磁场和转子磁场时刻相交,是电机控制的核心 。
既然要控制两个磁场的角度,那么首先要做的就是知道磁场的位置,即所谓的转子位置—参考基准。(这里面涉及到电机控制中非常重要的角度自学习,后面会有详细的介绍)
转子位置确定后,接下来就是就是控制定子磁场位置与转子磁场位置成90°。定子磁场是通过控制三相交流电来实现(电生磁), 那么电机控制实际上就是对电流的控制 。
如下图所示,灰色是电机基准磁场位置,粉红色为定子磁场位置,两者之间的角度并不是90°,因此此刻能产生一定转矩,但不是最大。

根据正交分解的原理,有效扭矩就是粉红色磁场在垂直与基准磁场90°的分量所产生。 这里虽然简单,但非常关键,电机控制学中Clarke和Park变换隆重登场 。将转子磁场方向定义为D轴(直轴),垂直与D轴90°的方向定义为Q轴(交轴)。也就是说任何时刻的定子磁场都可以分解为D轴磁场和Q轴磁场,其中D轴磁场不产生转矩,只有Q轴磁场产生转矩。 电机定向控制中的这种数学处理方式,也就是Clarke和Park变换 。

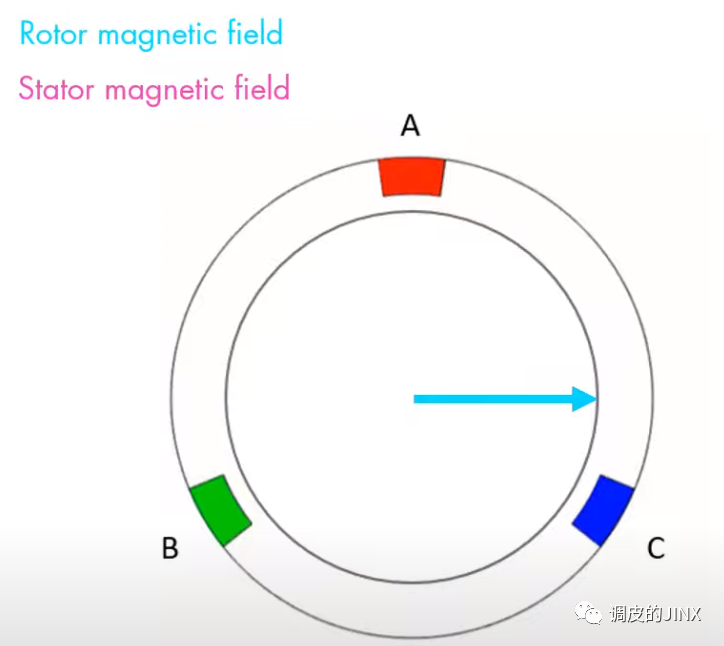
前面谈到定子是通过电流进行励磁产生旋转的磁场。如下图所示,图纸红色、绿色、紫色分别代表的就是A/B/C三相电流(间隔120°), 三相电流分量合成定子磁场向量总和 。通过控制不同时刻三相电流,也就可以控制电机定子磁场方向了。

Clarke和Park变换的根本意义在于,不在需要直接控制三相电流,而是控制变换后的Q轴电流和D轴电流 (Q-D轴电流和三相电流存在等价关系)。
有读者可能会说:道理我都懂,但是为什么要这么去做呢?
一方面,是减少控制变量,同时进行更直观的理解 (Iq产生扭矩,Id不产生扭矩);
另外一方面,电流控制是通过PID控制器来实现,而PID控制器很难控制交流信号 。交流电流通过Clarke和Park变换成两个直流电流后,通过两个PI控制器即可(一个使Id为0,一个使Iq最大)。
整个控制流程简单描述如下:
- 测试三相电流,通过Clarke和Park变换将三相电流转换成Iq和Id。
- 获取转换后的Iq和Id后,与需求进行对比,得出误差。
- 误差作为输出,通过PI控制器输出Vq和Vd(旋转坐标系中的变量)。
- Vq和Vd通过Clarke和Park转化成三相电压,对电机进行控制。

角度自学习
关于Clarke和Park变换暂且告一段落,还记得之前留下的测量转子角度吗?我们回过头来再看下这个问题。
通过前文描述,我们知道转子角度的位置测量是电机控制的基础。转子是一个旋转零件, 其绝对位置一直在变化 ,因此需要借助外界零件对其进行测量,而这个零件在驱动电机中常用的旋转变压器(在BLDC电机常用霍尔传感器),简称为旋变。
旋变可以理解为一个小电机,同样由定子和转子总成, 其输出的感应电压大小随转子角位移而发生变化 ,电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。通过对输出信息的解码来获取我们所需要的“角度”。
借助前文谈到的Clarke和Park变换概念, 通常将电机转子磁极产生磁场的N极中心轴线作为直轴Q轴;而超前直轴90°的位置定义为交轴D轴 。
借助前文谈到的Clarke和Park变换概念, 通常将电机转子磁极产生磁场的N极中心轴线作为直轴Q轴;而超前直轴90°的位置定义为交轴D轴 。

不要问我为什么这么定义,死记硬背就好了。
如下图所示,电机转子D轴与电机定子A轴存在一定夹角θ,这个夹角就是我们所需要知道的转子位置。

假如在这个时刻,旋变初始读数为0( 旋转变压器的正弦输出绕组中感应电压最小时,转子位置就是电气零位,输出电压就是零位电压 )。那么意味着,随着转子转动,电机转子D轴与电机定子A轴重合时,旋变读数会发生变化,旋变读数变为θ(暂不考虑方向正负)。

当电机转子D轴与电机定子A轴夹角θ为0时,我们称为电机零位。因为,此时电机无扭矩产生。
那么问题来了,电机零位和旋变零位不一样啊,这怎么办?
**很简单,通过标定的方式,强行将电机零位时的旋变角度进行归零。**这就是我们所说的电机角度自学习。电机零位和旋变零位的差角即为电机零位角。理论上,电机设计锁定后,电机零位角是固定的。
电机角度自学习的好坏,直接的影响电机性能输出 。能否一直保证最大扭矩输出,保证定子磁场和转子磁场正交,全靠它了。
其他
电机控制涉及到的名词众多:转速、转矩、功率、电压、电流等。 电压产生电流,是一切控制的源头 。
控制电压即可控制电流,控制电流即可控制磁场,控制磁场即可控制转矩,那么电机转速如何控制?
转速实际上是一个表面现象,控制转速是通过控制转矩来间接实现的 。
对于静止的电机,通电后提供的初始转矩使电机产生加速度,电机转速起来。
如果需要维持一定转速不变,Iq和Id产生的扭矩等于转动阻力,不再提供加速度即可。
若需要继续提速,Iq和Id产生的转矩大于转动阻力,继续提供加速度即可。减速道理是一样的。
-
基于模糊自适应PID控制的永磁同步电机伺服系统研究2025-07-29 569
-
永磁同步电机耐用吗 永磁同步电机寿命2023-03-16 10907
-
Simulink永磁同步电机控制仿真系列三:id=0的闭环控制2023-03-15 1317
-
永磁同步电机控制笔记:clark变换park变换示意图2023-03-13 950
-
永磁同步电机设计2023-03-06 2891
-
永磁同步电机控制解析合集2022-01-24 2501
-
1.0电机的分类及永磁同步电机的控制技术介绍2021-11-08 1634
-
永磁同步电机的矢量控制原理是什么2021-10-14 2909
-
永磁同步电机simulink模型搭建2021-08-27 1957
-
永磁同步电机FOC的有感和无感的程序控制 精选资料分享2021-07-09 2430
-
基于混沌同步系统实现永磁同步电机的状态观测器的设计2020-05-14 1887
-
单片机的永磁同步电机控制2018-01-30 1553
-
QEP控制的永磁同步电机2015-10-30 1210
-
永磁同步电机矢量控制原理2014-01-22 66304
全部0条评论

快来发表一下你的评论吧 !
