

你知道BLDC和PMSM的区别吗?
工业控制
描述
对于新能源电驱系统,大家关注更多的是高压驱动电机。实际上,除了这些“大电机”以外,还有很多“小电机”。比如,之前谈到的驻车系统中的驻车电机-Parking Motor。
这些“小电机”越来越多的采用无刷直流电机,即BLDC电机。与无刷直流电机相对应的是有刷直流电机。在这里,这个“刷”通指的是碳刷。
无论是无刷直流电机还是有刷直流电机,都属于永磁同步电机: 转子磁场由永磁体固定产生,定子磁场通过电流励磁产生 。
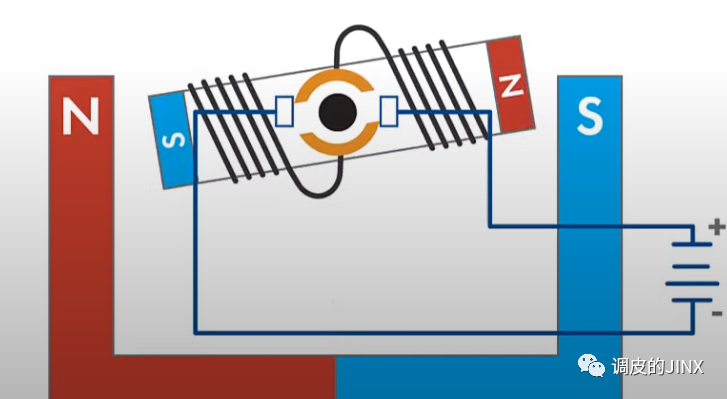
温故一下永磁同步电机的工作原理,可简单由下图来描述。此时,中间磁铁在磁场的作用下,受到来自顺时针方向的转矩。如果中间磁铁的极性保持不变,那么最终中间磁铁会处于水平状态。这种情况下,电机是无法实现360°旋转。
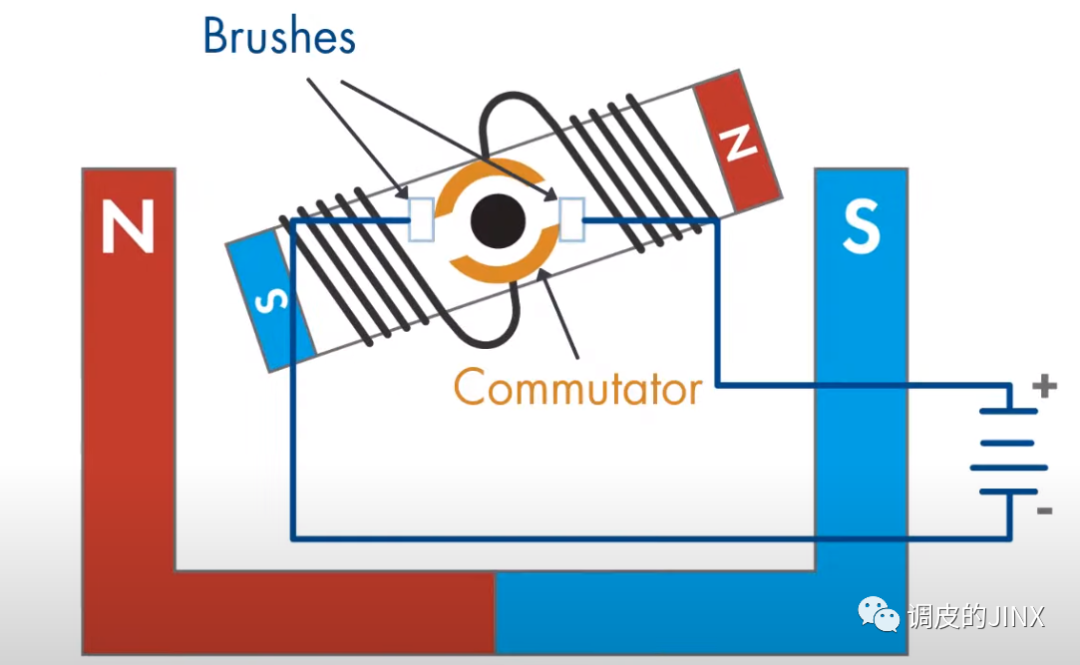
为了解决这个问题,需要对中间磁铁的极性进行切换,即所谓的换向,如下图所示。

在有刷电机中,换向是通过碳刷来实现,这也就是为什么被称为有刷电机的原因。而无刷直流电机换向是通过控制器,同驱动大电机。
无刷直流电机和有刷直流电机两者工作原理基本相同,唯一的不同在于无刷直流电机需要一个更加复杂的控制器来实现将直流电转换为三相交流电(无碳刷实现换向),而有刷直流电机通过直流电压轻松控制(碳刷实现换向)。
看在这里,大家可能会有疑惑。既然都属于永磁同步电机,为什么小电机被叫做“BLDC”,而驱动电机通常被叫做“PMSM”。 这样的区分对待有点怪怪的,但又不知道怪在哪。这个问题确实对电机入学者而言,非常不友好,极易产生混淆 。
从结构上来说无刷直流小电机和永磁同步大电机是一样的,都存在电机控制器、电机转子、电机定子、轴承及附件。
从能源输入来说,无刷直流小电机和永磁同步大电机是一样的,都是直流转交流。
不卖关子了, 真正区分两者的参数是"反电势" 。我们常说电机反电势是电机设计中最重要的一个参数之一,是因为 反电势是电机的身份证 。当电机设计冻结后,其反电势也就确定了。通过反电势的波形及大小,可以轻松的区分电机类型及大小。
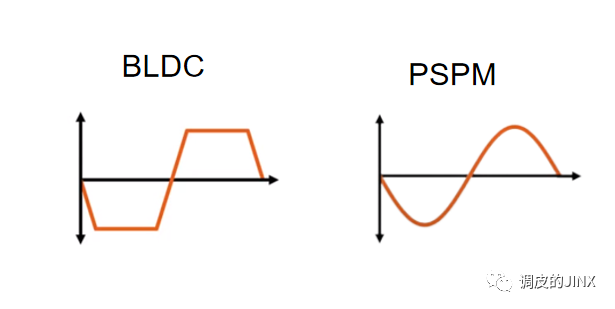
BLDC反电势波形是梯形,而PMSM反电势波形是正弦 。所以虽然都是永磁同步电机,为了区分还是要进行命名区分的,因此就出现了目前常说的BLDC和PMSM。
科研深处是哲学,肯定会有好奇的读者会问,为什么结构如此相似的它们反电势波形就不一样呢 ?
引用维基百科的定义,反电动势是指有反抗电流通过趋势的电动势,其本质上属于感应电动势 。 电动机转动时,线圈中也会产生感应电动势,这个感应电动势有削弱电源电动势的作用,这个感应电动势即为反电动势 。它的作用是阻碍线圈的转动。如果要使线圈维持原来的转动,电源就要向电动机提供能量,从而实现电能转化为其它形式的能。
从反电势的定义,可以看出反电势实际上体现的是整个电机磁场分布的参数 。也就是说,电机设计中的电磁设计决定了反电势。更细一步说,那就是 定子线圈绕组的设计(产生定子磁场)和转子磁钢分布设计(产生转子磁场)决定了反电势 。差异最大的是前者,定子绕组设计。
关于定子绕组设计,这个问题可以单开一期进行进行讲解,本期不进行拓展 。如果接触过BLDC和PMSM,那么就一定会发现这两个电机定子绕组设计的差异。
BLDC通常采用集中式绕组 ,集中式绕组应用于凸极式定子,通常绕制成矩形线圈,经纱带包扎定型,再经浸漆烘干处理后,嵌装在凸形磁极的铁心上。
PMSM通常采用分布式绕组 ,分布式绕组的电动机定子没有凸形极掌,每个磁极由一个或几个线圈按照一定的规律嵌装布线组成线圈组,通电后形成不同极性的磁极。
由于反电势波形的不同,BLDC和PMSM的控制算法也是不一样的 。
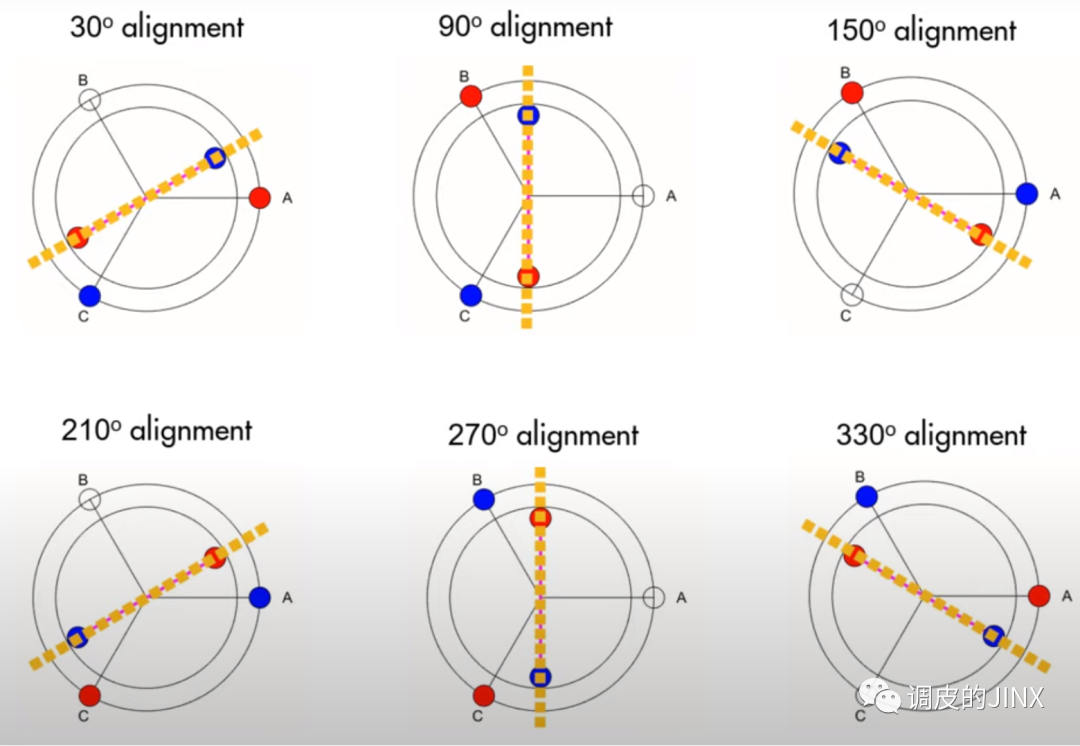
对于间隔120°的三相电机。通电方式共有6种:AB/AC/BA/BC/CA/CB。以下图为例,6种通电方式,将圆周方向均分为6等分。 这就意味着如果我们能够每60°对相位进行正确的变换,那么电机就能够顺利的转起来。 这就是所谓的BLDC 6步控制或梯形控制。
极对数越多,换向越频繁

在上期文章, 吐血整理最通俗易懂的电机控制讲解(一), 我们谈到PMSM电机控制是使得电机定子磁场和转子磁场始终保证90°,以获取最大转矩,所以我们采用了FOC(Field-Oriented Control)控制。
对比PMSM的FOC控制,BLDC的梯形控制中,定子磁场与转子磁场角度从未达到90°,且角度在一定范围内波动(60°内)。 一方面这种控制无法达到最大转矩,另外一方面也会存在转速和转矩的波动 。这种控制经济、简单,更适合用于小电机,也就是为什么大电机PMSM需要需求一个更加复杂和可靠的FOC控制。

-
BLDC与PMSM电机控制算法的联系与区别2025-10-27 17540
-
BLDC与PMSM的特点与区别2024-06-18 6187
-
无刷电机BLDC与PMSM的区别详解2023-03-22 1939
-
浅谈BLDC与PMSM二者的区别2022-01-01 23618
-
BLDC和PMSM电机的区别是什么?2021-10-19 5892
-
请问BLDC和PMSM电机有什么区别?2021-09-24 3078
-
BLDC和PMSM的区别是什么?2021-09-23 2920
-
BLDC与PMSM的区别2021-09-16 2236
-
请问BLDC与PMSM的区别是什么?2021-08-30 2282
-
无刷直流电机(BLDC)与永磁同步电机(PMSM)结构及其物理特性有何差异?2021-07-28 2768
-
无刷电机小知识:BLDC与PMSM的区别2019-08-22 11305
-
BLDC功率密度大于PMSM的原因2019-05-11 2965
-
BLDC还是PMSM?2019-02-21 3209
-
对比STM32 FOC BLDC与PMSM的区别2018-07-31 9579
全部0条评论

快来发表一下你的评论吧 !
