

感应电动机转差型矢量控制系统的设计
应用电子电路
描述
1 引言
近年来,随着电力电子技术、现代控制理论等相关技术的发展,使得感应电动机在可调传动中获得了越来越广泛的应用。矢量控制策略的提出,更是实现了磁通和转矩的解耦控制,其控制效果可媲美直流电动机。
本文在分析感应电动机矢量控制原理的基础上,基于matlab/simulink建立了感应电动机转差型矢量控制系统仿真模型,仿真结果证明了该模型的合理性。并在此基础上进行系统的软、硬件设计,通过实验验证控制策略的正确性。
2 矢量控制的基本原理
长期以来,直流电动机具有很好的运行特性和控制特性,通过调节励磁电流和电枢电流可以很容易的实现对转矩的控制。因为它的转矩在主磁极励磁磁通保持恒定的情况下与电枢电流成线性关系,所以通过电枢电流环作用就可以快速而准确地实现转矩控制,不仅使系统具有良好稳态性能,又具有良好的动态性能。但是,由于换向器和电刷的原因,直流电动机有它固有的缺点,如制造复杂,成本高,需要定期维修,运行速度受到限制,难以在有防腐防暴特殊要求的场合下应用等等。
矢量控制的设计思想是模拟直流电动机的控制特点进行交流电动机控制。基于交流电动机动态模型,通过矢量坐标变换和转子磁链定向,得到等效直流电动机的数学模型,使交流电动机的动态模型简化,并实现磁链和转矩的解耦。然后按照直流电动机模型设计控制系统,可以实现优良的静、动态性能。
在根据转子磁链定向的两相同步旋转坐标系下,感应电动机矢量控制系统的控制方程为:

(1)
从式(1)中可以看出,转子磁链ψr仅由定子电流励磁电流ism产生,与定子电流转矩分量ist无关,而电磁转矩te正比于转子磁链和定子电流转矩分量的乘积,这充分说明了感应电动机矢量控制系统按转子磁链定向可以实现磁通和转矩的完全解耦。
按转子磁链定向的矢量控制系统的关键是准确定向。但是,转子磁链的直接检测非常困难,而利用磁链模型间接估算磁链的方法又受到电机参数变化的影响,造成控制的不准确。因此,与其用磁链闭环控制而反馈不准,不如采用磁链开环控制,使得系统简单、可靠。采用磁链开环的控制方式,无需转子磁链的幅值,但对于矢量坐标变换而言,仍然需要转子磁链的位置信号。由此可知,转子磁链的计算仍然不可避免,如果利用给定值间接计算转子磁链的位置,可简化系统结构,这种方法称为间接定向。间接定向的矢量控制系统借助于矢量控制方程中的转差公式,构成转差型矢量控制系统[1]。
本文设计了一个转差型矢量控制系统。其控制思想是:在控制过程中,使电机转子磁链始终保持不变,电机的转矩就能和稳态工作时一样,主要由转差率来决定。按照这个思路,就可以从转子磁链直接得到定子电流m轴分量的给定值,再通过对定子电流的有效控制,避免了磁通的闭环控制。这种控制方法用转差率和测量的转速相加后积分来估算转子磁链的位置,结构比较简单,所能获得的动态性能基本上可以达到直流双闭环控制系统的水平。其系统模型如图1所示。
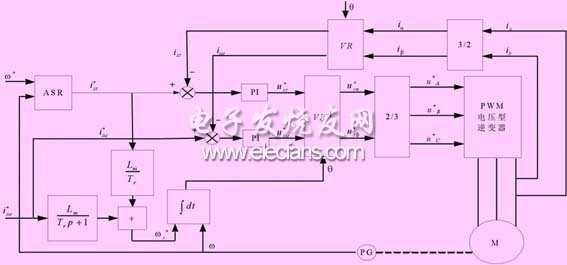
图1 转差型矢量控制系统原理图
3 系统仿真
根据以上的原理分析,搭建了感应电动机转差型矢量控制系统模型,利用matlab的工具软件simulink对系统进行仿真分析。系统仿真模型如图2所示。

图2 感应电动机转差型矢量控制系统仿真模型
在仿真系统中,转速调节器、转矩调节器和磁链调节器均采用输出限幅的pi调节。仿真波形如图3至图5所示。仿真结果表明磁链开环间接型矢量控制系统具有良好的控制性能。

图3 转速响应

图4 三相电流波形

图5 输出转矩
4 系统硬件电路设计
由于数字信号处理器dsp具有硬件电路简单、控制算法灵活,抗干扰能力强、无漂移、兼容性好等优点,现已广泛应用于交流电动机控制系统中,因此设计采用以dsp作为控制核心的数字控制系统。
系统采用交-直-交变压变频电路,输入单相220v交流电,输出三相交流电来控制感应电动机。控制电路以dsp芯片tms320lf2407为核心,构成功能齐全的全数字转差型矢量控制系统。整个系统主要包括主电路和控制电路两部分。
4.1 主电路
主电路是功率变换的执行机构,包括整流电路、滤波电路、能耗电路和逆变电路。本系统采用交-直-交电压型主电路,先把频率固定的交流电整流成直流电,再把直流电逆变成频率连续可调的三相交流电。逆变电路采用型号为ir16up60a的ipm模块,该模块包含了栅极驱动电路、逻辑控制电路以及欠压、过流、短路、过热等保护电路。该智能模块的应用,减小了装置的体积,提高了系统的性能与可靠性。
4.2 控制电路
系统的控制电路以tms320lf2407为控制核心,完成电流信号与转速信号检测、控制算法的实现以及相应的pwm信号输出。检测电路又分为电流检测和转速检测两部分。
4.2.1 电流检测
电流信号检测的结果用于矢量控制的坐标变换,以实现磁链和转矩的解耦。由于y型连接绕组中三相电流瞬时值的总和为0,即ia+ib+ic=0,因此只需检测其中两相电流,第三相可由其它两相信号相加取反获得。本系统采用chb-25np型电流霍尔传感器(见图6),将检测到的电流按200:1的变比在副边输出。由于tms320lf2407片内a/d转换器的允许输入为0-3.3v的单极型信号,故采集到的电流信号需经过电压偏移电路和限幅电路后进入dsp的a/d转换输入通道。

图6 电流采样电路
4.2.2 转速检测
转速检测是速度闭环控制系统的关键,其精度将直接影响调速系统的控制精度和稳定性。本系统采用增量式光电编码器,光电码盘的脉冲数为2048,它由5 v电压供电,有六路输出,即为a+、a-、b+、b-、z+、z-。其中a、b用于测速,它们相位相差90°,每转一周,输出2048个脉冲;而z轴每转一周输出一个脉冲,用于确定转子的空间位置。转速采集电路如图7所示。

图7 转速采集电路
将增量式光电编码器输出的信号a+、a-、b+、b-、z+、z-输入ds3486m,ds3486m具有抗干扰能力,可以提高传输的精度,使得速度信号可以远距离的传输。输出的信号经过一组反相器对波形进行整形,然后输入到dsp中的正交编码脉冲电路(qep电路)。通过正交编码脉冲电路便可获得感应电动机的转子位置和转速信息。
5 系统的软件设计
本系统的软件由两部分构成:主程序和pwm中断服务子程序组成(见图8)。主程序中对硬件和变量初始化,对各个控制寄存器置初值,对运算过程中使用的各种变量分配地址并设置相应的初值。初始化模块仅在dsp上电复位后执行一次,然后进入循环等待时期。中断服务子程序是系统的核心部分,负责a/d转换、速度计算、坐标变换、pi调节、生成pwm信号等[2]。

图8 pwm中断程序流程图
6 结束语
本文采用tms320lf2407设计了感应电动机转差型矢量控制系统,通过理论分析、仿真研究和实验结果证实:磁链开环间接型矢量控制系统具有良好的静、动态性能。
-
中国传动网讯:单片机在感应电动机控制系统中的应用2013-10-23 0
-
异步电动机矢量控制系统的研究及仿真2020-04-04 0
-
感应电动机的闭环控制系统设计2009-06-12 433
-
基于DSP的感应电动机转差型矢量控制系统2009-06-13 420
-
异步电动机转差型无速度传感器矢量控制系统2009-07-01 507
-
双PWM交流异步电动机矢量控制系统的研究2009-11-18 707
-
同步电动机转矩角矢量控制原理2010-05-24 813
-
基于模糊PID的交流电动机矢量控制系统2016-04-05 772
-
基于DSP的感应电动机SVPWM矢量控制调速系统2016-04-18 521
-
基于SVPWM的异步电动机矢量控制系统仿真2016-04-18 506
-
基于SVPWM调制的异步电动机矢量控制系统的仿真2016-04-18 479
-
基于混沌SVPWM的矢量控制感应电动机驱动2016-04-19 450
-
感应电机矢量控制系统的研究与仿真2016-04-26 720
-
DSP的发展及DSP在感应电动机矢量控制中的应用资料说明2019-11-04 1067
-
异步电动机的矢量控制系统2021-05-19 758
全部0条评论

快来发表一下你的评论吧 !
