

如何实现对开发板上LED的控制
描述
你好,我是爱吃鱼香ROS的小鱼。本节我们正式进入到MicroROS的核心通信部分的学习中来,本节我们将通过话题订阅,实现通过话题控制LED的亮灭。
硬件开发平台
为方便学习,本教程配套的硬件是小鱼自制的MicroROS学习板,同时该板可以作为下一章节搭建实体移动机器人的主控板以及后续制作机械臂的驱动板使用。
板载资源图如下:

该主控板可以在小鱼的店铺直接购买,性价比接地气,点击左下角阅读原文直达鱼香小铺。
一、新建工程添加依赖
新建example11_microros_topic_sub工程
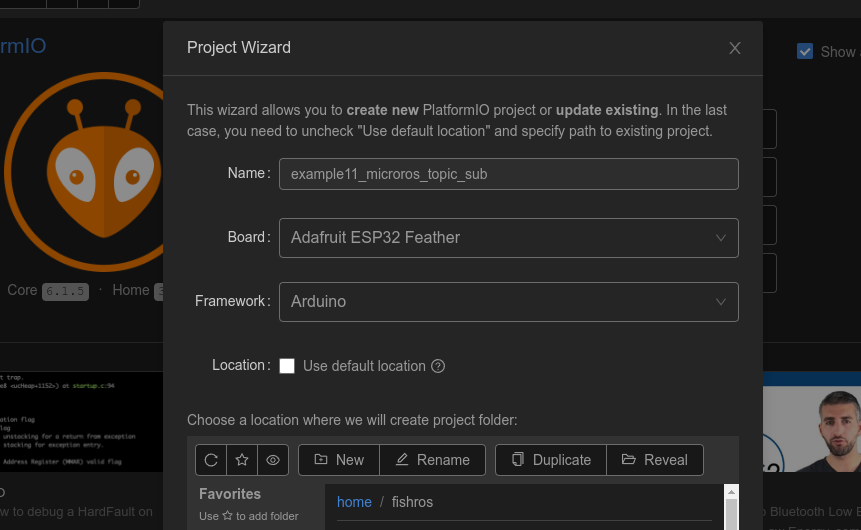
修改platformio.ini添加依赖
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
二、编写代码-实现订阅
编辑main.cpp,代码如下,注释小鱼已经添加到代码中来了
#include < Arduino.h >
#include < micro_ros_platformio.h >
#include < rcl/rcl.h >
#include < rclc/rclc.h >
#include < rclc/executor.h >
#include < std_msgs/msg/int32.h >
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
// 声明话题订阅者
rcl_subscription_t subscriber;
// 声明消息文件
std_msgs__msg__Int32 sub_msg;
// 定义话题接收回调函数
void callback_subscription_(const void *msgin)
{
const std_msgs__msg__Int32 *msg = (const std_msgs__msg__Int32 *)msgin;
if (msg- >data == 0)
{
digitalWrite(2, HIGH);
}
else
{
digitalWrite(2, LOW);
}
}
void setup()
{
Serial.begin(115200);
// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 topic_sub_test
rclc_node_init_default(&node, "topic_sub_test", "", &support);
// 订阅者初始化
rclc_subscription_init_default(
&subscriber,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"led_control");
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
// 为执行器添加一个订阅者
rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA);
// 初始化LED
pinMode(2, OUTPUT);
}
void loop()
{
delay(100);
// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
}
三、代码注解
相比之前的节点代码这里主要多了这几行
•#include 添加消息类型头文件
•rcl_subscription_t subscriber; 声明话题订阅者
•std_msgs__msg__Int32 sub_msg; 声明消息文件,这一点和上位机不同,因为内存紧缺,所以提前定义
•void callback_subscription_(const void *msgin) 接收到数据的回调函数
•rclc_subscription_init_default 初始化话题订阅者
•rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &callback_subscription_, ON_NEW_DATA);,为执行器添加一个订阅者
四、下载测试
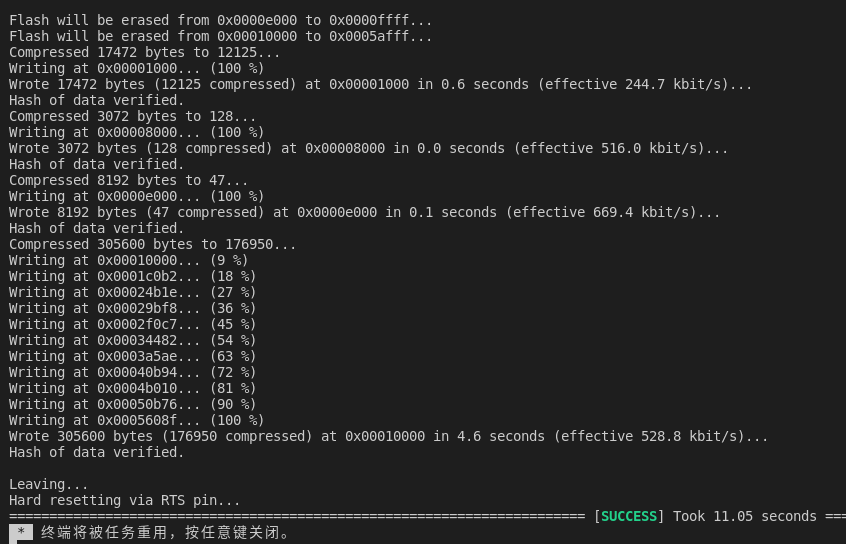
4.1 编译下载
连接开发板,编译下载。
4.2 启动Agent
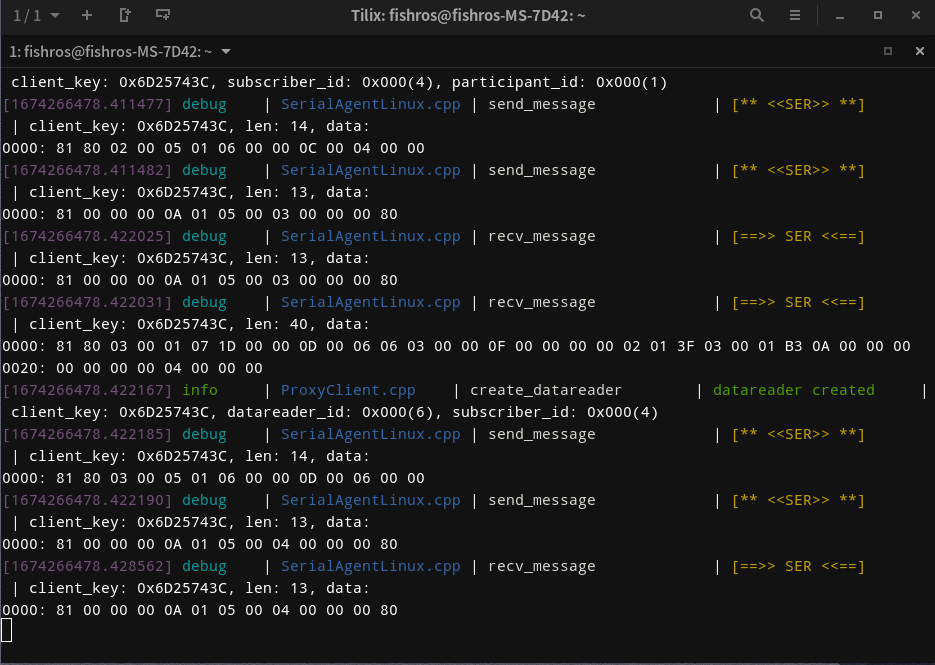
接着打开终端启动agent
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v
点击下RST按钮,重启开发板,正常可以看到下图内容
4.3 查看是否连通
接着打开终端查看节点和话题
ros2 node list
ros2 topic list
4.4 测试控制
关闭LED
ros2 topic pub /led_control std_msgs/msg/Int32 "{data: 0}" --once
打开LED
ros2 topic pub /led_control std_msgs/msg/Int32 "{data: 1}" --once
五、总结
本节我们通过话题订阅,实现对开发板上LED的控制,下一节我们将尝试读取开发板上的VM引脚电压,并将其通过话题发布到上位机中。
-
基于OpenHarmony开发板上测试Native C++应用开发2022-10-08 6443
-
FTHR-G0140开发板LED点灯2023-06-05 220181
-
【创龙TL3562-MiniEVM开发板试用体验】--开发板外设与接口测试2025-07-27 1154
-
PC上的QT怎样控制开发板上的LED2012-09-02 8180
-
用手机遥控开发板上的LED灯2018-12-04 2722
-
【FireBeetle 2 ESP32-S3开发板体验】串口控制LED2023-07-28 2492
-
让开发板上的LED灯闪烁起来吧2016-11-11 1090
-
代码控制开发板LED:STM32跑马灯试验2017-08-31 1359
-
如何使用代码控制开发板2022-03-14 8344
-
【时擎科技AT1000开发板试用体验】时擎科技AT1000 DEV开发板 – 烧录工具2022-11-22 2558
-
通过Web网页控制开发板LED灯2023-04-25 2506
-
【Start_DSC28034PNT湖人开发板免费体验】+湖人开发板功耗测试2023-07-10 1938
-
如何在开发板上实现话题发布流程2023-07-15 1696
-
S3C2440开发板上实现按键点亮LED驱动开发的详细过程2023-10-11 639
-
【干货分享】在M-K1HSE开发板上使用SecureCRT工具进行调试2025-08-12 1993
全部0条评论

快来发表一下你的评论吧 !
