

串联型PI和并联型PI调节器的比较
电子说
描述
导读:对于电机控制,PI调节器是其重要的环节之一。PI调节器的种类和对应的PI参数整定的方法是学习电机控制的必要内容。本期文章主要介绍串联型PI和并联型PI,并对PI参数的整定做一个简单的介绍。
一、PI调节器的种类
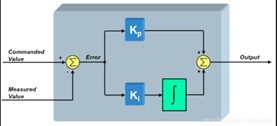
图1-1 并联型PI调节器
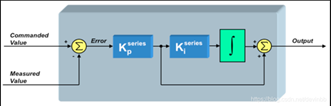
图1-2 串联型PI调节器
现在大多数的参考文献中的PI调节器都属于并联型PI调节器,而TI在InstaSPIN-FOC里推崇使用串联型PI调节器。这两种PI调节器并没有什么特别的不同,就看个人习惯选择哪一种。
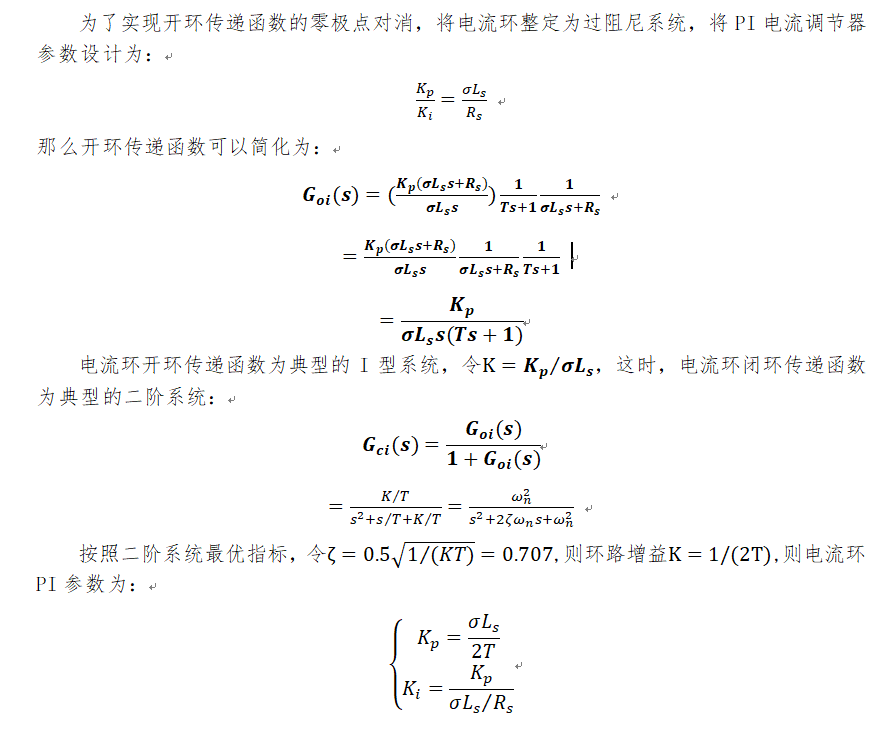
二、PI调节器的参数整定(以电流内环PI为例)
两种PI调节器的参数整定方法的思路都是基于零极点对消的原理,差别就是在整定的过程中有些差别,接下来分别介绍两种PI调节器的参数整定。
2.1 并联型PI调节器
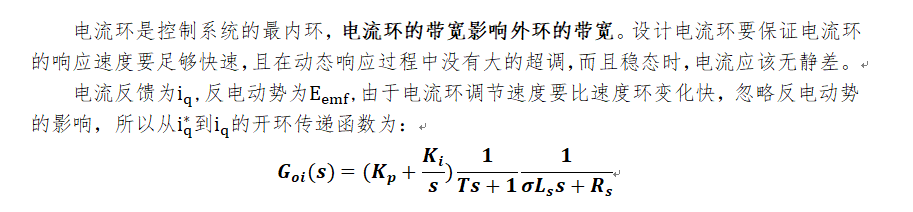
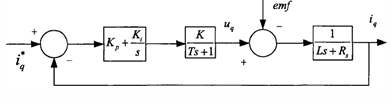
图2-1 PI电流环控制结构框图
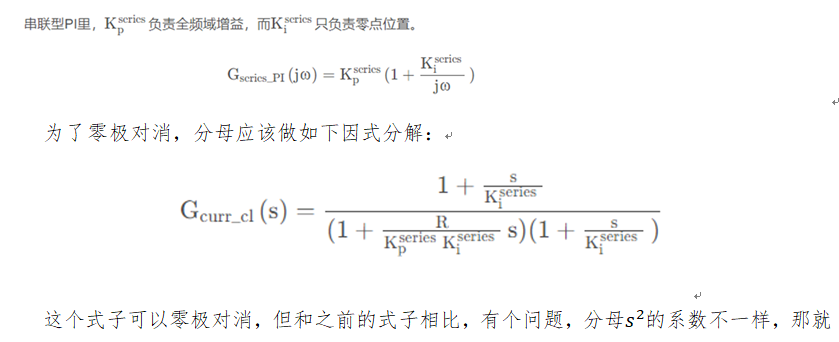
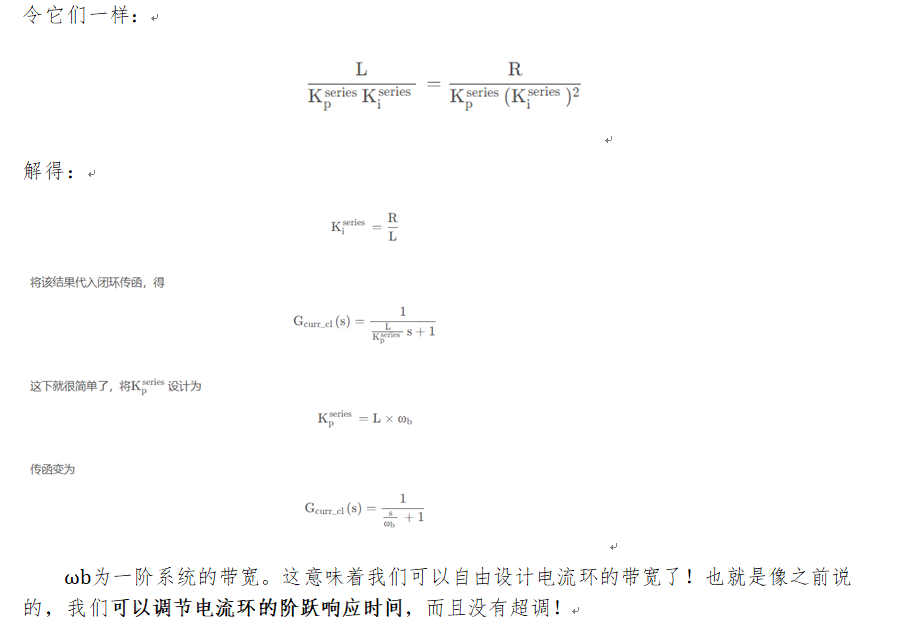
2.2 串联型PI调节器
三、仿真验证
仿真工况:仿真时间1秒,0.5秒之前空载,0.5秒之后满载;0.7秒之前正转,0.7秒之后反转;采样频率5KHz。
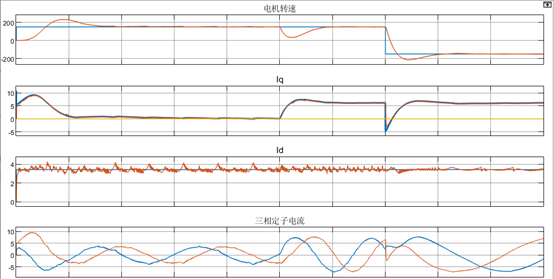
图3-1 仿真波形变化情况(并联型PI调节器,±150r/min)
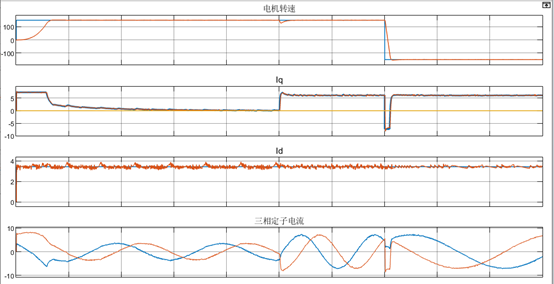
图3-2 仿真波形变化情况(串联型PI调节器,±150r/min)
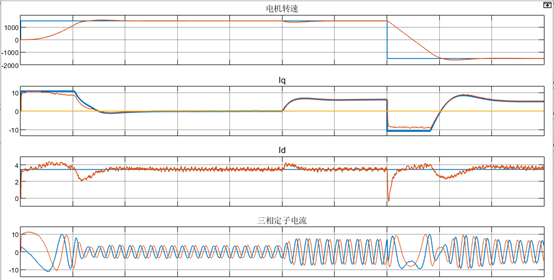
图3-3 仿真波形变化情况(并联型PI调节器,±1500r/min)
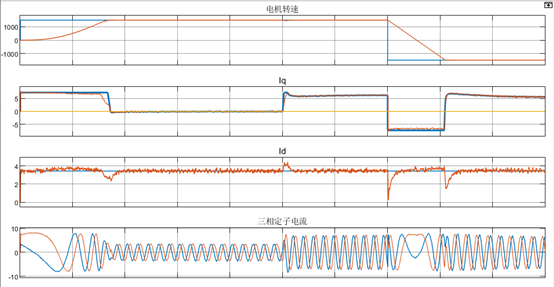
图3-4 仿真波形变化情况(串联型PI调节器,±1500r/min)
从图3-1到3-4比较可知,与并联型PI调节器相比,串联型PI调节器的超调量很小(速度环),且动态过程时间短,稳态过程的纹波也相对较小。综合可知,代入串联型PI调节器的控制系统的控制性能更好。
四、总结
之前都是习惯采用并联型PI调节器进行PI参数整定带入到控制系统中,低速区域的实际转速的超调量比较大。就个人比较而言,串联型的PI调节器更好用一些。后面再加入磁链环,形成双闭环,效果相对而言也更好一些。
-
pi调节器的作用是什么2024-06-30 9613
-
pi调节器p和i都是什么 pi调节器参数怎么整定2023-08-01 25672
-
永磁同步电机磁场定向控制电流环PI调节器的参数整定2023-05-23 6559
-
永磁同步电机磁场定向控制转速环PI调节器参数整定2023-03-15 1187
-
PI调节器的概念及设计2023-02-28 23390
-
PI电流调节器的工作原理和种类2022-09-19 11507
-
FOC电机控制中的PI调节器2021-08-27 2601
-
简易平均值PI调节器的设计方案解析2017-12-08 1782
-
pi调节器原理_pi调节器电路图_pi调节器参数作用2017-08-03 88739
-
PI调节器电路2009-02-25 9166
全部0条评论

快来发表一下你的评论吧 !
