

无刷直流电机BLDC最强科普收藏版
工业控制
描述
无刷直流电机(BLDC:Brushless Direct Current Motor),也被称为电子换向电机(ECM或EC电机)或同步直流电机,是一种使用直流电(DC)电源的同步电机。无刷直流电机(BLDC:Brushless Direct Current Motor)实质上为采用直流电源输入,并用逆变器变为三相交流电源,带位置反馈的永磁同步电机。
无刷电机(BLDC:Brushless Direct Current Motor)属于自换流型(自我方向转换),因此控制起来更加复杂。
BLDC电机(Brushless Direct Current Motor)控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。
BLDC电机(Brushless Direct Current Motor)可以根据应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
为了感应转子位置,BLDC电机(Brushless Direct Current Motor)采用霍尔效应传感器来提供绝对定位感应。这就导致了更多线的使用和更高的成本。无传感器BLDC控制省去了对于霍尔传感器的需要,而是采用电机的反电动势(电动势)来预测转子位置。无传感器控制对于像风扇和泵这样的低成本变速应用至关重要。在采有BLDC电机(Brushless Direct Current Motor)时,冰箱和空调压缩机也需要无传感器控制。
电机有各式各样的种类,而无刷直流电机是当今最理想的调速电机。它集直流电机与交流电机的优点于一身,既有直流电机良好的调整性能,又有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。因而备受市场欢迎,广泛应用于汽车、家电、工业设备等领域中。
无刷直流电机克服了有刷直流电机的先天性缺陷,以电子换向器取代了机械换向器,所以无刷直流电机既具有直流电机良好的调速性能等特点,又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。
Source:Google
无刷直流电机(Brushless Direct Current Motor)是当今最理想的调速电机。它集直流电机与交流电机的优点于一身,既有直流电机良好的调整性能,又有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。
无刷直流电机(Brushless Direct Current Motor)发展历史
直流无刷电机是在有刷电机的基础上发展而来的,其结构上要比有刷电机结构复杂。直流无刷电机由电机主体和驱动器组成,区别于有刷直流电机,无刷直流电机(Brushless Direct Current Motor)不使用机械的电刷装置,而是采用方波的自控式永磁同步电机,并以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料。(需要指出的是,在上世纪诞生电机的时候,产生的实用性电机却是无刷形式的。)
1740年代:电机发明开始
通过苏格兰科学家安德鲁·戈登(Andrew Gordon)的研究工作,电机的早期模型首次出现于1740年代。其他科学家,例如迈克尔·法拉第(Michael Faraday)和约瑟夫·亨利(Joseph Henry)继续开发早期的电机,尝试电磁场并发现如何将电能转化为机械能。
1832年:首款换向器直流电机的发明
1832年,英国物理学家威廉·斯特金(William Sturgeon)就发明了第一台可以提供足够动力来驱动机械的直流电机,但是由于其低功率输出,仍有技术缺陷,应用上受到严重限制。
1834年:制造了第一台真正的电机
跟随Sturgeon的脚步,美国佛蒙特州的托马斯·达文波特(Thomas Davenport)于1834年发明了第一台正式的电池供电的电机,从而创造了历史。这是第一台具有足够功率执行任务的电动马达,他的发明被用于为小型印刷机提供动力。1837年,托马斯·达文波特和他的妻子艾米莉·达文波特(Emily Davenport)获得了第一项直流电机专利。
1886年:实用性直流电机的发明
1886年,第一台可以在可变重量下恒速运行的实用直流电机面世。弗兰克·朱利安·斯普拉格(Frank Julian Sprague)是其发明者。
值得一提的是,该实用性电机采用无刷形式,即交流式鼠笼式异步电机,它不仅消除了火花、绕组两端的电压损失,可以以恒定速度输送功率。但是,异步电机有许多无法克服的缺陷,以致电机技术发展缓慢。
1887年:交流感应电机获得专利
1887年,尼古拉·特斯拉(Nikola Tesla)发明了交流感应电机(AC induction motor ),并在一年后成功申请了专利。它不适用于公路车辆,但后来由西屋公司的工程师进行了改装。1892年,设计了第一台实用的感应电机,接着是旋转的条形绕组转子,使该电机适用于汽车应用。
1891年:三相电机的开发
1891年,通用电气开始开发三相感应电机(Three phase motor )。为了利用绕线转子设计,GE和西屋公司于1896年签署了交叉许可协议。
1955年:直流无刷电机时代开始
1955年,美国d.harrison等人首次申请了用晶体管换向线路代替有刷直流电机机械电刷的专利,正式标志着现代无刷直流电机(Brushless Direct Current Motor)的诞生。但当时没有电机转子位置检测器件,该电机没有起动能力。
1962年:第一台无刷直流(BLDC)电机的发明
得益于1960年代初期固态技术的进步,1962年,TG Wilson和PH Trickey发明了第一台无刷直流(BLDC)电机,他们称之为“带固态换向的直流电机”。无刷电机的关键要素是它不需要物理换向器,因此成为计算机磁盘驱动器,机器人和飞机的最流行选择。
他们利用了霍尔元件来检测转子位置并控制绕组电流换相,使无刷直流电机达到实用化,但受到晶体管容量的限制,电机功率相对较小。
1970年代至今:无刷直流电机应用快速发展
70年代以来,随着新型功率半导体器件(如GTR、MOSFET、IGBT、IPM)相继出现,计算机控制技术(单片机、DSP、新的控制理论)的快速发展,以及高性能稀土永磁材料(如钐钴、钕铁硼)的问世,无刷直流电机(Brushless Direct Current Motor)得到快速发展,容量不断增大。
技术驱动产业发展,随着1978年mac经典无刷直流电机及其驱动器的推出,以及80年代方波无刷电机和正弦波无刷直流电机的研发,无刷电机真正开始进入实用阶段,并且得到快速发展。
无刷直流电机总体结构及原理
无刷直流电机(Brushless Direct Current Motor)由同步电动机和驱动器组成,是一种典型的机电一体化产品。同步电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。
BLDCM控制系统结构包括电机本体、驱动电路与控制电路三个主要部分。在工作过程中,电机的电压、电流和转子位置信息由控制电路收集、处理并生成相应的控制信号,驱动电路在接收到控制信号后驱动电机本体工作。
无刷直流电机(Brushless Direct Current Motor)主要由带有线圈绕组的定子、用永磁材料制造的转子和位置传感器组成。位置传感器,根据需要,也可以不配置。
定子
BLDC电机的定子结构与感应电机相似。它由堆叠的钢叠片组成,并带有轴向切槽以用于缠绕。BLDC中的绕组与传统感应电机的绕组略有不同。
通常,大多数BLDC电机由三个定子绕组组成,这三个定子绕组以星形或“Y”形连接(无中性点)。另外,基于线圈互连,定子绕组进一步分为梯形和正弦电动机。
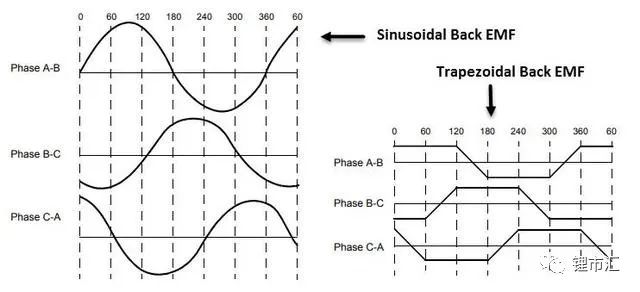
BLDC电机反电动势
在梯形电动机中,驱动电流和反电动势均呈梯形形状(在正弦电动机的情况下为正弦形)。通常,在汽车和机器人技术(混合动力汽车和机器人手臂)中使用额定48 V(或以下)的电动机。
转子
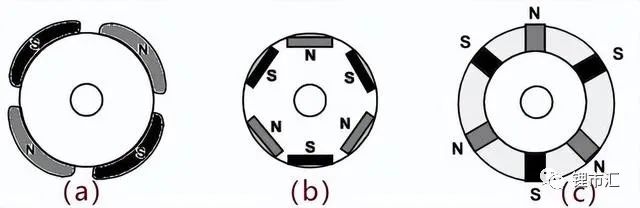
BLDC电动机的转子部分由永磁体(通常是稀土合金磁体,例如钕(Nd),钐钴(SmCo)和钕铁硼(NdFeB)组成。
根据应用,极数可以在2到8个之间变化,北极(N)和南极(S)交替放置。下图显示了磁极的三种不同布置。
(a)磁体放置在转子的外周上。
(b)称为电磁嵌入式转子,其中矩形永磁体嵌入转子的铁心中。
(c)将磁体插入转子的铁芯中。
BLDC电机转子
位置传感器(霍尔传感器)
由于BLDC电机中没有电刷,因此换向是电子控制的。为了使电机旋转,必须顺序地给定子绕组通电,并且必须知道转子的位置(即转子的北极和南极)才能精确地给一组特定的定子绕组通电。
通常使用霍尔传感器(根据霍尔效应原理工作)的位置传感器来检测转子的位置并将其转换为电信号。大多数BLDC电机使用三个霍尔传感器,这些传感器嵌入到定子中以检测转子的位置。
霍尔传感器是基于霍尔效应的一种传感器。1879年美国物理学家霍尔首先在金属材料中发现了霍尔效应,但是由于金属材料的霍尔效应太弱而没有得到应用。随着半导体技术的发展,开始用半导体材料制作霍尔元件,由于霍尔效应显著而得到应用和发展。霍尔传感器是一种当交变磁场经过时产生输出电压脉冲的传感器。脉冲的幅度是由激励磁场的场强决定的。因此,霍尔传感器不需要外界电源供电。
霍尔传感器的输出将是高电平还是低电平,这取决于转子的北极是南极还是北极附近。通过组合三个传感器的结果,可以确定通电的确切顺序。
有别于有刷直流电机,无刷直流电机将定子和转子完全颠倒,电枢绕组被设置在定子侧,而把高质量永磁材料镶嵌于转子侧。BLDCM的电机本体结构主要包括定子电枢绕组、永磁转子和位置传感器,三相绕组在电机定子空间上均匀布置,在相位之间分别相差120°电角度。该结构不同于纯粹的有刷直流电动机,与交流电动机的定子绕组结构类似,但在电机工作时会由驱动电路向其提供方波交流电。
BLDCM选择全桥三相星形接线六状态二-二导通方式,在同一时刻,驱动电路中导通两只MOSFET,相应地,电机本体中两相定子绕组串联通电。每电子换相一次,定子磁动势Fa转过60°空间电角度,是一个步进式磁动势,间隔60°时间电角度,Fa作一次跳跃。虽然转子旋转连续不断,但是定子磁动势转动方式为步进式,这与真正的交流同步电机旋转磁动势相异。BLDCM的Fa与转子磁动势Ff的空间夹角总是在60°~120°范围内周期性变化,平均值为90°,这样保证了定、转子磁动势Fa、Ff相互作用得到的是平均最大电磁转矩T,强力拖动永磁转子连续旋转。
无刷直流电机的工作原理与有刷直流电机相似。洛伦兹力定律指出,只要载流导体置于磁场中,它就会受到作用力。由于反作用力,磁体将承受相等且相反的力。当线圈中通过电流后,会产生磁场,该磁场被定子的磁极所驱动,同极性相互排斥,异极性相互吸引,如果持续改变线圈中电流的方向的话,那么转子所感应出磁场的磁极也会持续发生变化,那么转子就会在磁场的作用下一直转动。
在BLDC电机中,永磁体(转子)是运动的,而载流导体(定子)是固定的。
BLDC电机运转示意图
当定子线圈从电源获得电源时,它就变成电磁体并开始在气隙中产生均匀的磁场。尽管电源是直流电,但开关仍会产生具有梯形形状的交流电压波形。由于电磁定子和永磁转子之间的相互作用力,转子继续旋转。
通过将绕组切换为高和低信号,相应的绕组被激励为北极和南极。带有南极和北极的永磁转子与定子极对齐,从而导致电机旋转。
一对极和两对极的 BLDC 电机运行动图
无刷直流电机有三种配置:单相,两相和三相。其中,三相BLDC是最常见的一种。
(3)无刷直流电机的驱动方法
无刷直机电机的驱动方式按不同类别可分多种驱动方式:
按驱动波形:方波驱动,这种驱动方式实现方便,易于实现电机无位置传感器控制;
正弦驱动:这种驱动方式可以改善电机运行效果,使输出力矩均匀,但实现过程相对复杂。同时,这种方法又有SPWM和SVPWM(空间矢量PWM)两种方式,SVPWM的效果好于SPWM。
(4)无刷直流电机的优点与不足:
优点:
▷高输出功率
▷小尺寸和重量
▷散热性好、效率高
▷运行速度范围宽
▷低电噪声
▷高可靠性和低维护要求
▷高动态响应
▷电磁干扰少
不足:
控制该电机所需的电子控制器很昂贵
需要复杂的驱动电路
需要额外的位置传感器(FOC不用)
(5)无刷直流电机的应用
无刷直流电机广泛用于各种应用需求,例如工业控制(在纺织、冶金、印刷、自动化生产流水线、数控机床等工业生产方面,无刷直流电机都发挥重要的作用。),汽车(雨刷器、电动车门、汽车空调、电动车窗等部位都有电机的身影。),航空,自动化系统(在生活中常见的打印机、传真机、复印机、硬盘驱动器、软盘驱动器、电影摄影机等,在它们的主轴和附属运动的带动控制中,都有无刷直流电机的身影。),医疗保健设备(对无刷直流电机的使用已经较为普遍,可以用来驱动人工心脏中的小型血泵;在国内,手术用高速器具的高速离心机、热像仪和测温仪的红外激光调制器都使用了无刷直流电机。)等领域中的各种负载,恒定负载和定位应用。
无刷直流电机与有刷直流电机的区别:
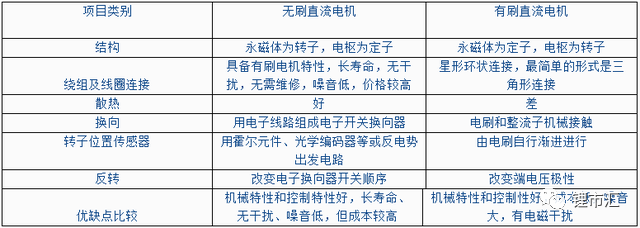
无刷直流电机与有刷直流电机的对比
全球BLDC电机主流制造商(Top 10)
目前BLDC产业内,排名比较靠前的企业有ABB、阿美特克(AMTEK)、日本电产、美蓓亚集团、德昌电机、联合运动技术公司、保德电子公司、北美电气公司、施耐德电气、及雷勃电气(Regal Beloit Corporation)等。
来源:维基百科、网易及百度资讯整合
审核编辑:刘清
-
电机:无刷直流电机的原理2025-05-23 9563
-
无刷直流电机(BLDC)运转工作原理图2024-03-20 10192
-
什么是无刷直流电机(BLDC)?无刷直流电机的优势有哪些?2023-08-29 11516
-
无刷直流电机(BLDC)构成、应用领域及工作原理详解2023-06-13 11863
-
无刷直流电机和有刷直流电机的区别2023-03-17 10387
-
有刷电机及无刷直流电机(BLDC)介绍2023-03-08 1469
-
无刷直流电机最强科普(收藏版)2022-08-24 6003
-
BLDC无刷直流电机有哪些优势2021-09-18 2403
-
无刷直流电机原理2021-09-15 2942
-
无刷直流电机的驱动方法有哪些2021-08-11 5784
-
什么是无刷直流电机(BLDC)以及它的应用2019-06-06 54589
-
解析什么是无刷直流电机(BLDC)2019-05-28 25935
-
无刷直流电机(BLDC)基础2016-05-05 1665
全部0条评论

快来发表一下你的评论吧 !
